 基于CAN總線技術實現MODEM抄表系統的設計
基于CAN總線技術實現MODEM抄表系統的設計
利用極為普遍的公用電話網實現MODEM遠程抄表是目前電力遠程監測管理的主要方式之一。常見的MODEM抄表系統是管理中心通過電話網以發散的形式與分散于各臺變區域的集中器連接,形成1對N的星型通信網絡。由于利用電話線進行通信通常需要較長時間進行握手應答和線路續接,數據點較多時通信效率很低;另外,當集中器數目較多時,租用的電話線也較多,尤其在居民密集的城區,集中器的密度很大,管理中心的電話租借費用將相當高。因此,上述缺點限制了傳統的基于電話網的電力遠程監測管理系統的推廣使用。
為此,開發了一種基于CAN總線的電力遠程監測管理系統。該系統打破了傳統的一個集中器一部電話的組建模式,而將位置相對集中的多個集中器用CAN總線組成局域網,一個局域網只需一部電話與管理中心通信。這種組建方式一方面大大減少了集中器電話租借數目,大大降低了通信成本;另一方面,利用CAN總線特有的廣播通信方式,可有效提高系統的實時通信能力。
1 、電力遠程監測管理系統構成
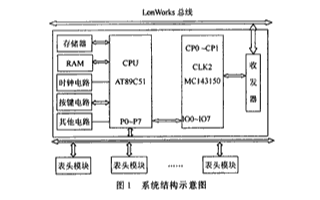
基于CAN總線的電力遠程監測管理系統是一個三級分布式檢測系統,主要由管理中心、集中器、采集單元、通信信道、采集終端等5部分組成,系統結構如圖1所示。
圖1中,系統信道包括電話線、CAN總線和RS-485總線。采用電話線撥號方式,三級通信包括管理中心與主集中器之間的MODEM通信、主集中器與從集中器之間的CAN總線通信、集中器與采集單元(或采集模塊、采集終端)之間的RS-485總線通信,通過MODEM的調制和解調功能,能夠及時、方便地進行系統的遠程信息傳輸,與主集中器實現信息交換:每臺主集中器通過CAN總線,可以管理10 km內安放在各配電變壓器附近的從集中器(CAN節點),從集中器為1~110個;從集中器通過RS-485總線,采用的SN65LBC184芯片規定的從機個數為1~64個,因此系統采集終端的個數也為1~64個,(即1~1024戶居民用戶電表),管理變壓器采集單元和低壓居民用戶采集終端;每個采集終端可以實現1~16戶居民用戶的電量采集與采集信息傳輸。
圖1 基于CAN總線的電力遠程監測管理系統
2、 CAN總線通信系統設計
CAN總線是電力遠程監測管理系統主、從集中器之間的通信鏈路,CAN總線通信的穩定可靠是電力遠程監測管理系統運行成敗的關鍵。
2.1 CAN總線簡介
CAN(Controller Area Network,控制器局域網)是一種先進的串行通信協議,屬于現場總線范圍。CAN總線具有較強的糾錯能力,支持差分收發,因而適合高噪聲環境,并具有較遠的傳輸距離,特別適合中小型分布式測控系統。由于CAN具有實時性好、可靠性高、抗干擾能力強、傳輸距離遠、通信速度快、采用短信息幀結構和多主通信方式以及可使用多種通信介質等許多優點,在航空、航海、汽車、建筑物環境控制、機床、醫療設備等領域以及各種工業自動化控制系統中得到了廣泛的應用。
2.2 CAN總線分布式測控網絡的組建方法
多個CAN節點通過傳輸介質按一定的形式互連,就可以組成CAN通信網絡。與RS-485總線類似,CAN總線只支持總線型網絡拓撲結構,不支持環形或星型網絡。CAN總線通信只用到兩根導線CAN_H、CAN_L,對通信介質的要求較低,雙絞線、同軸電纜或光纖均可,通常采用廉價的雙絞線即可。由集中器節點組成的CAN總線分布式測控網絡結構如圖2所示。
圖2 CAN總線分布式測控網絡結構圖
圖2中,總線的兩個末端均接有抑制信號反射的終端電阻RT,一般取RT=100~120Ω。在實際組網時,應根據現場情況決定圖中的3個參數:節點分支長度D應小于0.3米;相鄰節點的距離S和不加中繼的可靠通信距離L取決于總線的通信速率,速率越高,其允許值越小。按照CAN國際標準ISO11898的建議,在總線位速率為1Mbps時,S和L的值應小于40m,但當總線位速率小于5Kbps時,L的允許值可達10Km。
3、 主、從集中器之間的通信方式
在本電力遠程監測管理系統中,主、從集中器之間是一種典型的分布式通信系統,以主從方式進行通信,即系統中必須且僅需一個主集中器,其余均為從集中器。所有通信皆由主集中器發起,從集中器之間不能、也無必要通信。
3.1 主、從集中器地址分配
CAN協議的報文標識符可以使不同的數據發往不同的節點,也可以使不同的節點同時收到相同的數據。若定義某CAN節點只接收以某個特定的標識符開始的數據,則可以近似地把該標識符作為此節點的“地址”。
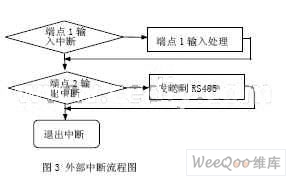
電力遠程監測管理系統中,主、從集中器作為CAN總線的節點都工作于增強模式(PeliCAN mode),以擴展幀雙濾波方式傳遞報文。對于擴展幀而言,濾波器1由ACR0、ACR1、AMR0和AMR1構成,濾波器2由ACR2、ACR3、AMR2和AMR3組成,擴展幀格式的CAN信息幀的29位標識符中也只有高16位(ID28~ID13)參與了濾波。兩個濾波器在過濾數據時是“或”的關系,即只要CAN信息幀通過其中任意一個濾波器的驗收,就可以被接收。如圖3所示即為擴展幀格式的雙濾波器驗收濾波流程圖。
圖3 擴展幀格式的雙濾波器驗收濾波流程
系統為每個CAN節點的濾波器1的驗收碼寄存器ACR定義了不同的數值,用以區分不同的集中器,即為集中器分配了地址,其中主集中器的地址為0001,這是區分主、從集中器的標志。有了這個CAN節點地址,分布式系統中的主集中器就可以和系統中任意一個從集中器交換數據,即進行點對點雙向通信。所有從集中器的濾波器2的ACR值均為FFFFH,作為接收主集中器廣播數據的地址。主、從集中器的地址分配如表1所示。
表1 主、從集中器的地址分配
由上可見,基于CAN總線的分布式通信系統中,主、從集中器之間實質上存在著兩條信息通道,即所有CAN節點的濾波器1構成了點對點信息交換通道(點名通道),所有CAN節點的濾波器2構成了一點對多點的信息交換通道(廣播通道)。其中點名通道是雙向的,廣播通道是單向的,即CAN信息幀由主集中器發出,所有從集中器進行接收。CAN總線分布式測控網絡信息通道抽象示意圖如圖4所示。
圖4 CAN總線信息通道抽象示意圖
3.2 點名通信
進行點對點雙向通信(點名)時,主集中器發送的信息幀高16位標識符即為從集中器的地址(點名地址)。系統所有從集中器的驗收屏蔽碼AMR全為0,即要求濾波器1和濾波器2進行全值濾波,只有當從集中器的濾波器1驗收碼ACR設定值與主集中器發送的點名地址完全相符時,該從集中器才可以接收數據。主集中器的驗收屏蔽碼AMR全為1,實現無條件濾波,可以接收所有從集中器的數據,這個特點是主從式通信系統中主機所應具備的特點。
點名通信由主集中器發起,通過總線送出信息幀后,所有從集中器均進行濾波,但只有符合點名地址的那個從集中器才能接收到命令和數據,由其CAN控制器SJA1000向CPU發出中斷請求。從集中器的中斷服務程序根據接收的命令或數據執行相應的操作,然后向主集中器發送返回信息。
3.3 廣播通信
進行廣播通信時(如整點對時、發布統一費率等),主集中器發送的信息幀高16位標識符是FFFFH,所有從集中器均可通過各自的濾波器2接收數據,從而實現全局廣播通信。廣播通信可以使同一CAN局域網內的所有從集中器同時接收主集中器的命令或數據,體現了通信的實時性和同步性。
4、 結束語
基于CAN總線的電力遠程監測管理系統利用CAN總線實現了位置相對集中的變壓器臺區的組網通信,大大減少了MODEM抄表所需的電話租借數目,大幅降低電話租借費用,取得了良好的經濟效益。實際運行表明:CAN總線可以實現主、從集中器之間的可靠通信。因此,本系統所采用的CAN總線通信方式可推廣到其它類似的分布式測控系統。
責任編輯:gt
-
控制器
+關注
關注
112文章
16376瀏覽量
178197 -
CAN總線
+關注
關注
145文章
1951瀏覽量
130782 -
局域網
+關注
關注
5文章
754瀏覽量
46291
發布評論請先 登錄
相關推薦
無線抄表系統(WAMR)
電力抄表系統的發展前景
GPRS低功耗無線抄表模塊
基于ZigBee技術的遠程抄表方案
基于無線傳感器網絡的遠程自動抄表系統設計
基于Zigbee技術的電力無線抄表系統設計
遠程抄表系統的優點是什么?
USB總線在遠程抄表系統中的應用

基于AT89C51單片機和總線技術實現電表抄表模塊的設計





 工商網監
工商網監
評論