

引言
近年來,隨著液晶顯示屏( liquid crystal disPlay,LCD) 的廣泛應用,生產過程中對LCD 缺陷的檢測變得越來越重要,而自動光學檢測技術作為質量檢測的重要手段,也已經在LCD 缺陷檢測中得到了應用。
LCD 缺陷種類繁多,比如刮痕。雜質。Mura 缺陷以及線路缺陷等,本文中將討論線路缺陷的檢測。LCD 缺陷檢測中常見的檢測方法主要有3 種: 參考比較法。非參考校驗法和混合法。非參考校驗法主要基于數學形態學操作; 應用較多的是參考比較法,它基于圖像配準和與標準模板作差進行缺陷檢測,這種方法操作簡單,可以有效地檢測出常見缺陷,但是對配準精度要求很高,同時由于需要事先建立標準模板,內存消耗也較大。例如KANG 等人提出了一種基于模式比較和邊界擴張的方法,首先由模式比較得到只包含缺陷的圖像,然后對每個缺陷的每個像素作標記,對于同一個缺陷卻被劃分為多個區域的情況,采用邊界擴張的方法進行區域合并,最后分析缺陷區域特征信息。本文中的方法其優點在于不需要模式比較。該線路缺陷檢測算法基于圖像輪廓分析,在目標區域提取過程中,采用了一種形態學操作的擊中擊不中變換( hit-miss transform,HMT) 方法,有效準確地提取出了待檢測的線路區域。圖像輪廓分析是本文中檢測算法的核心,在閾值分割之后,進行邊緣檢測以得到單像素邊界,根據這個特點采用基于深度優先搜索的方法來進行邊界追蹤,以尋找線路圖像輪廓,并用離散化的格林公式計算輪廓面積。
1 系統組成及預處理
由于LCD 線路的線寬線距很小,需要很高的像素分辨率,同時又要保證足夠的視場,因此面陣相機很難滿足要求。本系統采用線掃描電荷耦合器件( chargecouPled device,CCD) 相機,有效像素7400; 另外,采用直線電機代替傳統的旋轉電機以提高系統精度。檢測系統如圖1 所示

圖2 展示了該系統采集的1 幅LCD 線路圖像的一部分。圖2 中畫出了L1,L2兩條直線,L1和L2之間的區域為所要檢測的目標區域,L1上面和L2下面部分是由于相機視場因素而多拍攝的圖像,因此首先進行目標區域的提取。提取目標區域需要先找到一個定位標志,然后以定位標志為基準點提取出目標區域,LCD 上一般采用十字形作為定位標志。本文中采用基于擊中擊不中變換的方法來檢測十字形的坐標。
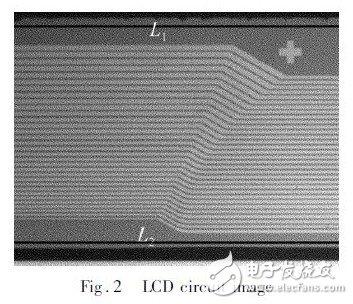
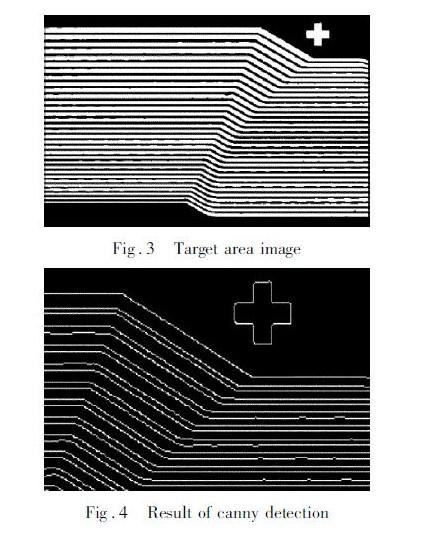
HMT 針對二值圖像操作,因此先要將線路圖像進行閾值分割,然后應用HMT 找到十字形定位標志的中心,再根據液晶尺寸,以定位中心為基準點,向上下左右4 個方向偏移適當距離提取出目標區域。圖3 顯示了閾值分割后提取出的目標區域圖像。
在輪廓分析之前,首先要提取線路單像素邊緣,且由于二值化后的線路邊緣明確,canny 邊緣檢測即可得到單像素邊緣圖像。圖4 為采用canny 邊緣檢測后的結果的局部圖。
2 LCD 線路輪廓分析
2. 1單個輪廓搜索在液晶線路的輪廓圖像中,每一條線路或者一個標志( 例如十字形定位標志) 的輪廓均為一條封閉曲線。
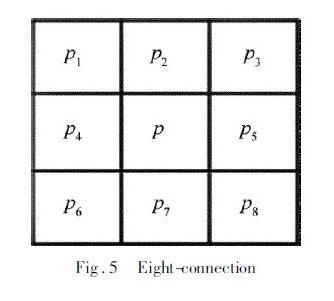
輪廓分析已有相關算法被提出,在作者采用的檢測方法中,結合LCD 線路輪廓的單像素特點,分析時采用八鄰域連通的方法,但是在搜索輪廓過程中優先搜索中心像素的左右上下4 個像素,然后再搜索4個角的像素,并采用深度優先搜索策略[10]?基于八鄰域連通的深度優先搜索如圖5 所示,P 為中心像素,搜尋輪廓時先判斷P5,P4,P2,P7,如果沒有像素與P 連通,然后再判斷P3,P8,P6,P1; 一旦找到一個與P 連通的像素,例如P5,那么立即停止搜索P 的其它相鄰像素,而以P5為中心繼續搜索。
在搜索過程中,定義如下數據結構來表示一個輪廓: tyPedef vector < Pair < int,int > > Contour; vector 和Pair 是C + + 標準庫類型,Pair < int,int > 表示輪廓上的1 個像素,第1 個參量為行坐標,第2 個參量為列坐標。在搜索過程中每找到一個像素就將其加入到vector.圖6 說明了對單個輪廓的搜索過程。
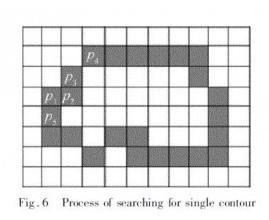
首先定義一個Contour 對象contour,假定從P1開始搜索,由于LCD 線路主要走向是橫向,因此先搜索P1的左右像素,再搜索上下像素,最后搜索4 個角的像素; 當搜索到一個連通像素P2后,根據深度優先策略,停止對P1鄰域的搜索,即使P1還可能有其它連通像素,例如這里的P5和P3,將P1存入contour,并將P1標記為已搜索; 然后以P2為中心搜索,雖然P1與P2連通,但標記為已搜索,因此,將搜索到P2的連通像素P3; 再以P3為中心搜索到P4,如此進行下去。當搜索到P5時,發現與其連通的像素均已標記為已搜索,于是對該輪廓的搜索結束。可見,對一個輪廓搜索結束的條件為: 某一像素的所有連通像素均標記為已搜索。
2. 2 輪廓面積計算
當得到一個輪廓的所有像素之后,就能很方便地計算其特征參量,比如周長。面積。質心等。由圖6 可以看出,輪廓的周長即是該輪廓所包含的像素個數,因此可以很方便地計算出來; 質心可由質心公式計算,對于圖像即是所有像素的坐標平均值。
本文中檢測缺陷時需要用到輪廓的面積,對于曲線所圍成區域,可以采用格林公式計算其面積,定義如下: 設單連通閉區域D 由分段光滑的曲線L 圍成,函數R( x,y) 及Q( x,y) 在D 上具有1 階連續偏導數,則有。
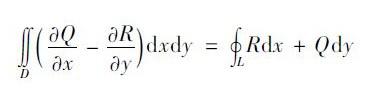
其中對于二值圖像中的連通區域,用差分代替微分,用求和代替積分,可推導出輪廓的面積計算公式。設輪廓由m 個像素點Rk( Xk,Yk) 組成,其中k = 1,2,…,m;Rm + 1 = R1; R1,R2,…,Rm沿輪廓正向排列,則面積S 可表示為。
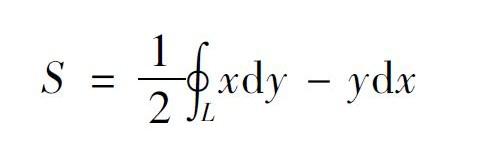
如果按輪廓曲線的正向來搜索像素,最后得到的contour 中的像素點即是按正向排列的,應用上面公式可快速計算出輪廓面積。在計算面積的時候,不管輪廓內部是否包含其它輪廓,均當做單連通區域處理,因為當一個輪廓內部包含其它輪廓的時候,內部輪廓則是由于線路的孔洞缺陷導致,將其也看作一個單連通區域,便于后面的缺陷判斷檢測。
2. 3 整幅圖像輪廓分析
設經過二值化。目標區域提取以及邊緣檢測后的圖像為image[m][n],輪廓為白色,背景為黑色。為了對已搜索過的像素作標記,建立一個與原圖像尺寸一致的標記數組。將所有輪廓存儲在一個vector 對象中,算法具體步驟如下。
( 1) 建立一個與圖像尺寸一致的標記數組flag[m][n],初始化為0,表示所有元素均沒被標記。
( 2) 從左至右從上至下遍歷圖像所有像素,當掃描到一個白色且未被標記的像素Pix( i,j) 時,說明找到一個新輪廓,以該像素為起點,按照上面的單個輪廓分析算法搜索出該輪廓的所有像素,存入表示該輪廓的Contour對象中,搜索過程中已搜索過的白色像素在flag 數組中的對應元素置1?當本次搜索完畢時,將該輪廓的Contour 對象存入vector < Contour > 對象中。
( 3) 繼續掃描圖像,重復第( 2) 步,直到遍歷完成個圖像,至此已找出所有輪廓,算法結束。
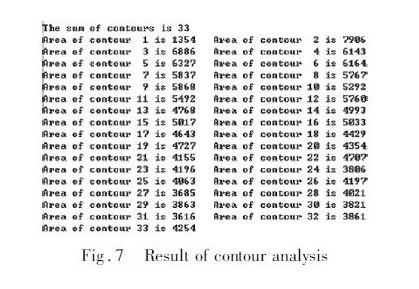
對圖2 應用上面的算法進行輪廓分析,統計了輪廓的面積,結果圖7 所示。
為了測試該算法的性能,選擇了不同尺寸和不同輪廓數目的LCD 線路圖像,對每張圖像進行50 次重復測試統計輪廓分析時間,其圖像尺寸。輪廓數目以及輪廓分析平均消耗時間的關系如表1 所示。所用PC 配置Intel Core2 Duo T6670,2. 2GHz 處理器,2GB 內存,Windows7 系統,并在VS2008 開發環境下進行試驗。
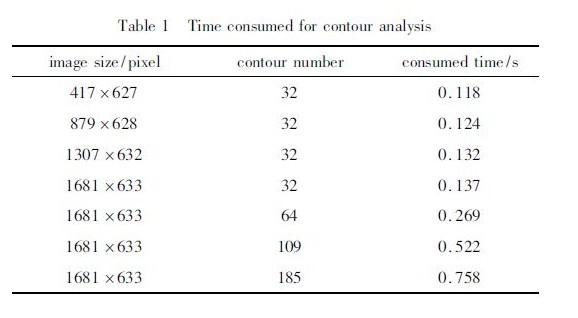
從表1 可以看出,該輪廓分析方法能快速地找出所有線路輪廓并計算出其面積。同時由表1 前4 行可知,在輪廓數目相同的情況下,隨著圖像尺寸的成倍增加,所需時間增加很緩慢; 由后4 行可知,在圖像尺寸不變的情況下,輪廓分析時間隨輪廓數目成近似線性關系; 因此,影響消耗時間的主要因素是輪廓數目。由于LCD 線路圖像的像素分辨率高,圖像尺寸很大,但線路數目相對較少,因此,用該方法可高效率地檢測LCD 的線路缺陷。
3 檢測流程和實驗結果
本文中算法檢測的LCD 線路的缺陷示意圖如圖8所示,包括短路。短路。孔洞和孤島4 種缺陷。
缺陷檢測流程如下。
( 1) 對某一型號的LCD,選擇一定數目( 這里取10塊) 標準樣品,按上述算法過程計算出每塊LCD 線路的輪廓數目和每個輪廓的面積,對于面積將10 次所得到的值取平均,以此作為這一型號的標準數據。
( 2) 對該型號任一待測LCD,同樣按照上述算法計算出其輪廓數和每個輪廓的面積。如果輪廓數與標準數據不同,則必定是不良品; 否則轉下一步。
( 3) 由于數目相同時可能是短路。斷路等多種缺陷同時發生,因此將輪廓面積逐個與標準數據比較,如果有短路。斷路。孔洞和孤島等缺陷,則必定存在某些輪廓與標準數據差異很大,故設定適當閾值T,如果每個輪廓面積差值的絕對值都小于T,則判定為合格品,否則為不良品。
根據上述算法和檢測流程,選擇了10 種不同型號的小型LCD,每種選取了20 個樣品進行測試,這些樣品包含無缺陷及有短路。斷路。孔洞及孤島缺陷的LCD,在總共200 個樣品中,只有2 片誤檢,正確率達99%,對誤檢的LCD 進行分析,其誤檢主要是線路受到灰塵的污染所致。同時,采用基于圖像配準再作差的模板匹配法對上面200 個樣品進行測試,結果有9片誤檢,正確率95. 5%,誤檢主要因素是圖像配準的偏差。可見該方法可以有效地檢測出含有上述4 種缺陷的LCD?
4 結論
基于圖像輪廓分析的LCD 線路缺陷檢測方法與傳統的基于圖像配準的方法相比,由于避免了配準偏差帶來的影響,因此提高了檢測正確率。在輪廓分析過程中,對單像素輪廓采用基于深度優先搜索的方法,有效地提取了線路輪廓,并根據離散化的格林公式快速地計算出了輪廓面積。將待檢測LCD 的線路輪廓信息與標準信息比較以判斷是否存在缺陷,經驗證,本文中的算法可以有效地檢測出LCD 中的短路。斷路。孔洞以及孤島缺陷,在LCD 線路缺陷檢測方面具有很好的應用前景。
-
lcd
+關注
關注
34文章
4479瀏覽量
170040 -
電機
+關注
關注
143文章
9200瀏覽量
147662 -
分辨率
+關注
關注
2文章
1076瀏覽量
42299
發布評論請先 登錄
相關推薦






 工商網監
工商網監

評論