") 針對家用電器馬達(dá)線圈而設(shè)計(jì)的半定子繞線機(jī)控制系統(tǒng)
針對家用電器馬達(dá)線圈而設(shè)計(jì)的半定子繞線機(jī)控制系統(tǒng)
1、引言
本系統(tǒng)主要針對于空調(diào)等家用電器馬達(dá)線圈的繞線和排線而設(shè)計(jì)。隨著我國家電行業(yè)的持續(xù)發(fā)展與完善,其市場容量不斷擴(kuò)大,自動化程度不斷提高,對家用電器馬達(dá)的需求量也逐年增長。但由于市場的成熟,競爭必然越演越烈。只有那些產(chǎn)品質(zhì)量好,規(guī)模大、成本低的廠家才能在競爭中贏得市場。而本文介紹的繞線機(jī)控制系統(tǒng)就是針對這一點(diǎn)而設(shè)計(jì),很適合需要控制質(zhì)量、擴(kuò)大規(guī)模、降低成本的廠家來裝配新設(shè)備或進(jìn)行舊設(shè)備的改造。
2、系統(tǒng)介紹
系統(tǒng)由四個(gè)模塊組成:主控電路板模塊、人機(jī)接口模塊、無刷電機(jī)控制模塊,步進(jìn)電機(jī)控制模塊。系統(tǒng)的組成示意圖見圖2.1。

圖2.1系統(tǒng)組成示意圖
(1)主控電路板模塊:主要用來協(xié)調(diào)其他三個(gè)模塊的工作,并實(shí)現(xiàn)電機(jī)控制算法,人機(jī)接口的交互與用戶編程的存儲,系統(tǒng)外部事件的捕捉與管理等。
(2)人機(jī)接口:給用戶提供友好的操作編程界面,和完備的系統(tǒng)信息。
(3)繞線電機(jī)控制模塊:由一個(gè)直流無刷電機(jī)和其驅(qū)動器組成,完成繞線工作。
(4)步進(jìn)電機(jī)控制模塊:由兩個(gè)步進(jìn)電機(jī)及配套驅(qū)動器組成,共同完成換槽位與排線工藝。
3、系統(tǒng)硬件實(shí)現(xiàn)
圖3.1系統(tǒng)硬件組成實(shí)物圖
系統(tǒng)的硬件實(shí)現(xiàn),主要目標(biāo)是在保障系統(tǒng)穩(wěn)定性的前提下,最大程度提高系統(tǒng)的性能和降低系統(tǒng)的成本。
(1)主控制板模塊
主控制板的核心選用高性能的AVR貼片微控制器,不僅運(yùn)算能力強(qiáng)大,內(nèi)部定時(shí)器與中斷資源豐富,自帶2K的可編程EEPROM,可以勝任多個(gè)外部事件實(shí)時(shí)管理、3個(gè)電機(jī)的控制算法、人機(jī)接口交互的實(shí)現(xiàn)、用戶程序的編輯與存儲等。
另外,主控板上有兩套電源系統(tǒng),穩(wěn)壓5V給微控制器及光耦等芯片供電,24V為外部的輸出信號供電,提高系統(tǒng)信號的驅(qū)動能力和抗干擾能力,保障系統(tǒng)的穩(wěn)定性。
(2)人機(jī)接口模塊
人機(jī)接口模塊硬件,僅由一塊1602字符型液晶,2*4防抖鍵盤電路組成,但通過緊湊的界面實(shí)現(xiàn)所有人機(jī)交互與用戶編程功能。
(3)繞線電機(jī)控制模塊
繞線電機(jī)控制模塊硬件,主要由57SW系列高性能直流無刷電機(jī)及配套的WS2208驅(qū)動器組成,以及光電感應(yīng)計(jì)數(shù)、測速電路組成。57SW直流無刷電機(jī)與 WS2208驅(qū)動器搭配,可以實(shí)現(xiàn)200-4000轉(zhuǎn)/分的線性調(diào)速,穩(wěn)態(tài)速度穩(wěn)定,精度可達(dá)±10轉(zhuǎn)/分,而成本遠(yuǎn)遠(yuǎn)低于市場上同等性能的主流產(chǎn)品。而計(jì)數(shù)、測速電路僅以一個(gè)光電感應(yīng)開關(guān)為基礎(chǔ),配合一定的高效算法,便實(shí)現(xiàn)了快速、準(zhǔn)確地計(jì)數(shù)、測速功能,大大降低了系統(tǒng)的硬件成本。
(4)步進(jìn)電機(jī)控制模塊
步進(jìn)電機(jī)控制模塊硬件,根據(jù)實(shí)際應(yīng)用需求,為負(fù)載較大的分度電機(jī)選用了56混合式步進(jìn)電機(jī)與容量較大的DMD403步進(jìn)電機(jī)驅(qū)動器,而負(fù)載較小的排線電機(jī)則選用了混合式42電機(jī)及容量較小的DMD402步進(jìn)電機(jī)驅(qū)動器。并在軟件上為兩個(gè)步進(jìn)電機(jī)設(shè)計(jì)了S型加減速算法、間隙補(bǔ)償算法等,讓系統(tǒng)以最簡單的硬件配備,減少運(yùn)行振動,保證機(jī)器性能和加工效果。
4、軟件系統(tǒng)設(shè)計(jì)
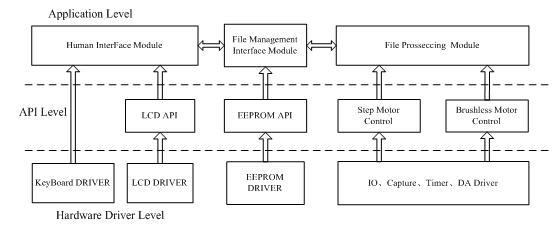
圖4.1 系統(tǒng)軟件框圖
由圖可知,系統(tǒng)軟件由三個(gè)模塊組成,各模塊又分三層來實(shí)現(xiàn)和管理。
(1) 人機(jī)接口模塊
此模塊通過鍵盤與LCD液晶的驅(qū)動,來實(shí)現(xiàn)與管理一系列相關(guān)的用戶界面。模塊利用面向?qū)ο蟮乃枷耄迅鱾€(gè)界面當(dāng)作一個(gè)界面對象來管理,這樣提高了代碼的重復(fù)利用率,大大節(jié)約了代碼空間。然后在此基礎(chǔ)上,為各個(gè)界面對象建立了狀態(tài)機(jī)管理機(jī)制,這樣增強(qiáng)了每個(gè)界面對象的功能,又簡化了各個(gè)界面間的跳轉(zhuǎn)操作,并讓模塊的擴(kuò)展能力得到加強(qiáng)。
(2) 文件管理接口模塊
文件管理模塊,在有限的EEPROM空間,建立了29個(gè)定長文件的管理體系。主要記錄文件的參數(shù),以及一些加工的工藝細(xì)節(jié)信息。
(3) 文件加工模塊
文件加工模塊,是本系統(tǒng)軟件的核心模塊。在該模塊的API層,①實(shí)現(xiàn)了兩個(gè)步進(jìn)電機(jī)的S型加減速算法,間隙、角度補(bǔ)償算法,減少了機(jī)械運(yùn)行時(shí)的振動和沖擊,并達(dá)到了至少0.5o的精度(精度視具體精度而定,機(jī)械性能良好時(shí),可達(dá)0.1o);②實(shí)現(xiàn)了步進(jìn)電機(jī)二次復(fù)位的算法,保證了系統(tǒng)的復(fù)位精度和穩(wěn)定性;③為繞線電機(jī)實(shí)現(xiàn)了S型的無級調(diào)速算法,使得繞線電機(jī)可以在2s內(nèi)平穩(wěn)升速到3000轉(zhuǎn)/分,并基本無過沖,保證了效率和繞線質(zhì)量。④通過主控板的捕捉中斷功能,并輔以定時(shí)器建立的時(shí)間坐標(biāo),實(shí)現(xiàn)實(shí)時(shí)繞線計(jì)算和測速功能。
在本模塊的應(yīng)用層,根據(jù)加工文件建立了狀態(tài)機(jī)來管理和實(shí)現(xiàn)繞線加工過程的所有工藝要求。使用狀態(tài)機(jī)的優(yōu)點(diǎn)在于①對于加工過程復(fù)雜的工藝,狀態(tài)機(jī)流程清晰,便于管理;②轉(zhuǎn)態(tài)機(jī)好的擴(kuò)展性,可以幫助系統(tǒng)適應(yīng)更多應(yīng)用場合的工藝需求。
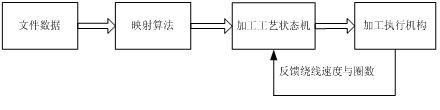
圖4.2 文件加工實(shí)現(xiàn)示意圖
5. 結(jié)束語
本系統(tǒng)依據(jù)空調(diào)室內(nèi)機(jī)等家用電機(jī)的半定子量身定制。采用先進(jìn)運(yùn)動控制算法控制2路步進(jìn)電機(jī),1路無刷電機(jī);實(shí)現(xiàn)了友好的人機(jī)接口界面與簡易的編程方式;實(shí)時(shí)高效的繞線計(jì)數(shù)與測速功能。整個(gè)系統(tǒng)在設(shè)計(jì)和實(shí)現(xiàn)上,很好的把高性能和低成本結(jié)合在一起,具備很強(qiáng)的市場競爭能力,并已成功應(yīng)用于浙江臥龍家用電機(jī)有限公司。
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6732瀏覽量
111531 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9186瀏覽量
147517 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3142瀏覽量
148654
發(fā)布評論請先 登錄
相關(guān)推薦






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論