") 合理運用ADAMS/MATLA仿真于數(shù)控伺服系統(tǒng)中
合理運用ADAMS/MATLA仿真于數(shù)控伺服系統(tǒng)中
利用伺服進給系統(tǒng)虛擬樣機提供的集成環(huán)境對機械系統(tǒng)和電機控制系統(tǒng)進行聯(lián)合仿真分析,是一種全新的設(shè)計方法。在傳統(tǒng)的復(fù)雜機械系統(tǒng)設(shè)計過程中,機械工程師和控制工程師雖然在共同設(shè)計開發(fā)一個系統(tǒng),但是他們各自都需要建立一個模型,然后分別采用不同的分析軟件,對機械系統(tǒng)和控制系統(tǒng)進行獨立調(diào)試。如果發(fā)現(xiàn)問題,機械工程師和控制工程師又需要回到各自的模型中,修改機械系統(tǒng)和控制系統(tǒng),然后再進行物理樣機的聯(lián)合調(diào)試。實現(xiàn)虛擬樣機機構(gòu)設(shè)計與運動控制系統(tǒng)之間的聯(lián)合仿真,必須在運動控制系統(tǒng)與樣機模型間起信息交互的橋梁。
ADAMS(Automatic Dynamic of Mechanical System)提供了對復(fù)雜機電一體化系統(tǒng)進行聯(lián)合仿真分析的方法。ADAMS 軟件提供的一種方法是利用ADAMS/Controls 模塊,將機械系統(tǒng)仿真分析工具同控制系統(tǒng)設(shè)計仿真軟件有機地連接起來,實現(xiàn)機電一體化系統(tǒng)的聯(lián)合仿真分析和復(fù)雜機電系統(tǒng)聯(lián)合仿真。
1. X-Y 工作平臺伺服性能仿真系統(tǒng)
1.1 利用ADAMS 對進給驅(qū)動機械系統(tǒng)建模
1.1.1 幾何建模
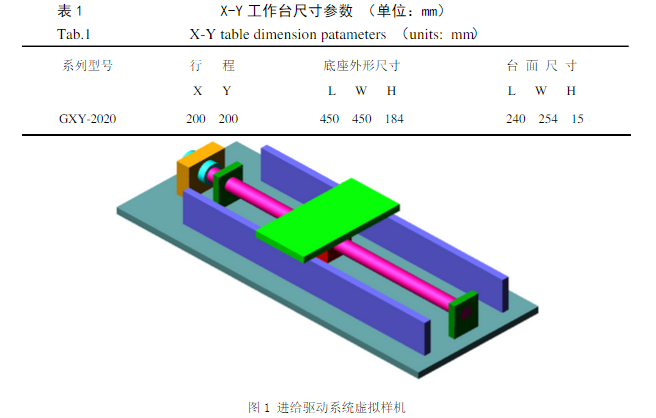
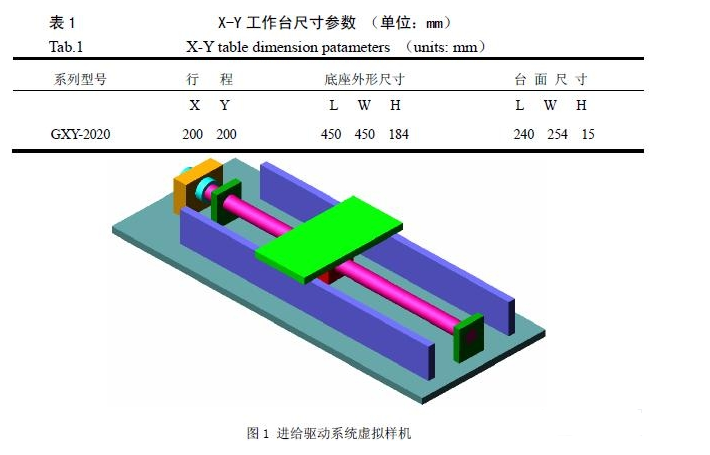
X-Y 工作平臺尺寸參數(shù)與幾何模型如表1 和圖1 所示。
1.1.2 模型約束
ADAMS/View 提供的約束副有:理想約束(Idealized joint)、虛約束(Joint primitive)、高副約束(Contact)和運動驅(qū)動(Motions generator)等類型。理想約束是通常的具有物理意義的約束副,如:旋轉(zhuǎn)副、移動副、齒輪副等;虛約束用于限制物體之間的相對運動;高副約束用于定義兩個物體在運動過程中的接觸情況;運動驅(qū)動用于驅(qū)動模型按一定的規(guī)律運動。施加約束的正確與否主要與四個因素有關(guān):約束類型、約束對象、約束位置、約束方向。如圖2 和圖3 所示。
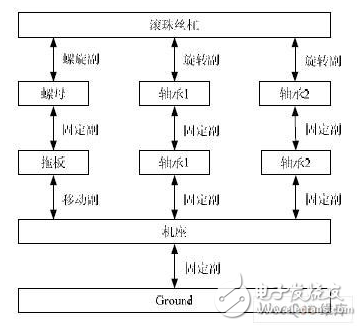
圖2 X-Y 平臺伺服系統(tǒng)各部件之問的拓撲結(jié)構(gòu)和約束關(guān)系
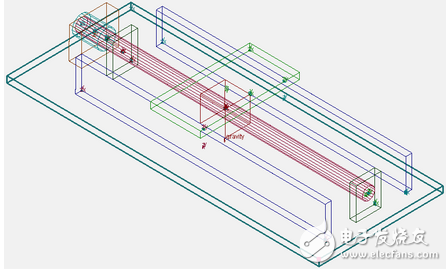
圖3 樣機中的約束和力
2. MATLAB/ADAMS 接口原理與設(shè)計
2.1 定義ADAMS 的輸入與輸出
需要通過 ADAMS/View 或ADAMS/Solver[6]中的信息文件或啟動文件,確定ADAMS 的輸入和輸出。輸出是指進入控制程序的變量,表示從ADAMS/Control 輸出到控制程序的變量。而輸入是指從控制程序返回到ADAMS 的變量,表示控制程序的輸出。如圖4 所示。
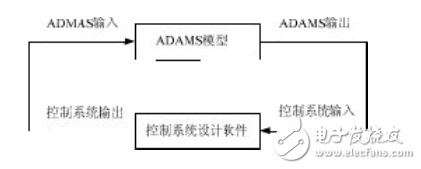
圖 4 ADAMS 與MATALB 的接口
通過定義輸入和輸出,實現(xiàn) ADAMS 和MATLAB 控制程序之間的消息閉環(huán)通訊。即從ADAMS 輸出的信號進入MATLAB,同時從MATLAB 輸出的信號進入ADAMS 程序。這里所有程序的輸入都應(yīng)該設(shè)置為變量,而輸出可以是變量或者是測量值。
2.2 MATLAB 環(huán)境中構(gòu)造控制系統(tǒng)的方框圖
采用MATLAB/Simulink 工具箱建立的伺服進給系統(tǒng)的控制系統(tǒng)的仿真模型[7],步驟1中在ADAMS/View 環(huán)境里建立好的虛擬樣機機械系統(tǒng)模型應(yīng)被設(shè)置為控制系統(tǒng)方框圖的每一個模塊。ADAMS/plant 嵌入在MATLAB 環(huán)境中的框圖和內(nèi)核參數(shù)對話框分別如圖5 所示。
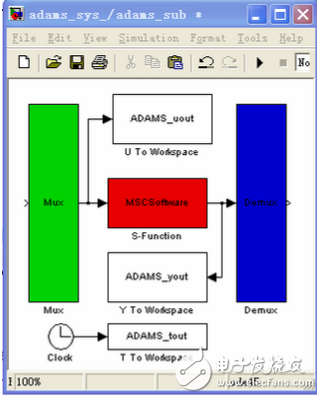
圖5 Simulink 中ADAMS 控制框圖
結(jié)語
(1)實現(xiàn)多領(lǐng)域模型仿真的方法是利用每一特定領(lǐng)域的專門商用仿真軟件對該領(lǐng)域子系統(tǒng)進行建模,然后利用這些商用仿真軟件提供的接口將不同領(lǐng)域子系統(tǒng)的仿真模型組裝成為一個整體。
(2)虛擬樣機軟件ADAMS 可以實現(xiàn)和仿真控制軟件MATLAB/Simulink 無縫連接,通過定義系統(tǒng)輸入、輸出變量完成控制信息交互,從而進行復(fù)雜機電系統(tǒng)聯(lián)合仿真。
(3)虛擬樣機軟件ADAMS 為用戶自定義函數(shù)提供了接口,可以通過自定義動態(tài)連接函數(shù)實現(xiàn)外部控制數(shù)據(jù)驅(qū)動下的仿真。
(4)性能仿真系統(tǒng)的核心技術(shù)是虛擬樣機技術(shù),而虛擬樣機的核心需要建立準確描述系統(tǒng)的仿真模型,然后與其他相關(guān)軟件有機關(guān)聯(lián)集成在一起進行系統(tǒng)性能仿真,其關(guān)鍵技術(shù)包括建模和仿真技術(shù)。
-
MATLAB仿真
+關(guān)注
關(guān)注
4文章
176瀏覽量
20062 -
數(shù)控伺服系統(tǒng)
+關(guān)注
關(guān)注
2文章
6瀏覽量
7264 -
ADAMS
+關(guān)注
關(guān)注
1文章
20瀏覽量
17344
發(fā)布評論請先 登錄
相關(guān)推薦
PSO算法在數(shù)控機床交流伺服系統(tǒng)PID參數(shù)優(yōu)化中的應(yīng)用
數(shù)控機床的伺服系統(tǒng)
數(shù)控機床的伺服系統(tǒng)
進給伺服系統(tǒng)
基于模糊理論的數(shù)控伺服系統(tǒng)仿真研究
數(shù)控伺服系統(tǒng)的ADAMS MATLA聯(lián)合仿真研究
基于模糊理論的數(shù)控伺服系統(tǒng)仿真研究
數(shù)控伺服系統(tǒng)的ADAMS MATLA聯(lián)合仿真研究
數(shù)控伺服系統(tǒng)的ADAMSMATLA聯(lián)合仿真研究
一文讀懂數(shù)控伺服系統(tǒng)的作用
數(shù)控伺服系統(tǒng)的ADAMS/MATLA聯(lián)合仿真研究





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論