") 關(guān)于雙足機器人的設(shè)計與研究
關(guān)于雙足機器人的設(shè)計與研究
引言
機器人是一門綜合性很強的學(xué)科,有著極其廣泛的研究和應(yīng)用領(lǐng)域。機器人技術(shù)是綜合計算機技術(shù)、信息融合技術(shù)、機構(gòu)學(xué)、傳感技術(shù)、仿生科學(xué)以及人工智能等多學(xué)科而形成的高新技術(shù),它不僅涉及到線性、非線性、基于多種傳感器信息控制以及實時控制技術(shù),而且還包括復(fù)雜機電系統(tǒng)的建模、數(shù)字仿真技術(shù)及混合系統(tǒng)的控制研究等方面的技術(shù)。
仿人形機器人是機器人技術(shù)中的一個重要研究課題,而雙足機器人是仿人形機器人研究的前奏。步行技術(shù)是人與大多數(shù)動物所具有的移動方式,是一種高度自動化的運動,雙足步行系統(tǒng)具有非常復(fù)雜的動力學(xué)特性,具有很強的環(huán)境適應(yīng)性。相對輪式、履帶式機器人,它具有無可比擬的優(yōu)越性,可進入狹窄的作業(yè)空間,也可跨越障礙、上下臺階、斜坡及在不平整的地面上工作,以及護理老人、康復(fù)醫(yī)學(xué)和一般家庭的家政服務(wù)。另一方面,由于雙足機器人具有多關(guān)節(jié)、多驅(qū)動器和多傳感器的特點,而且一般都具有冗余的自由度,這些特點對其控制問題帶來很大難度,為各種控制和優(yōu)化方法提供理想的實驗平臺,使其成為一個令人矚目的研究方向,因此對雙足步行機器人行走規(guī)劃機器控制的研究不僅具有很高的學(xué)術(shù)價值,而且具有一定的現(xiàn)實意義。
以小型雙足機器人的設(shè)計為重點,介紹一款小型雙足機器人的設(shè)計,包括自由度配置,動力源核材料選擇,并針對所設(shè)計的機器人進行靜態(tài)步行規(guī)劃。
1 小型雙足機器人本體設(shè)計
作為一種雙足機器人研究平臺,要求所設(shè)計的機器人能夠滿足研究者對雙足機器人的基本要求,即機器人具備穩(wěn)定行走的能力,為研究雙足機器人的行走方法步態(tài)規(guī)劃提供平臺。圖1為所設(shè)計的雙足機器人的平面圖。機器人共有18個自由度,頭部的前方和左右兩側(cè)都裝有超聲波傳感器,用來檢測障礙物,頭頂裝有聲敏傳感器,用來檢測聲音。
1.1 機器人自由度配置
鄭元芳博士從仿生學(xué)的角度研究仿人機器人腿部自由度配置。得出關(guān)節(jié)扭矩最小條件下的兩足步行結(jié)構(gòu)自由度配置方案。他認為髖部和踝部各設(shè)置2個自由度,可改變行走方向,踝關(guān)節(jié)處再增加一個回轉(zhuǎn)自由度,使得腳板在不規(guī)則的表面落地;膝關(guān)節(jié)設(shè)置 1個自由度,方便上下臺階。則每條腿要設(shè)置7個自由度。
根據(jù)鄭元芳理論,可規(guī)劃出所設(shè)計的類人機器人的運動過程和行走步驟:重心左移(假設(shè)先邁右腿,左腳支撐)、右腿抬起、右腿放下、重心移到兩腿間、重心右移、左腿抬起、左腿放下、重心移到兩腿間,共分8個階段。這里設(shè)計的機器人具有避障功能,因此髖關(guān)節(jié)的側(cè)向旋轉(zhuǎn)自由度必不可少。所設(shè)計的機器人不考慮在不規(guī)則地面上行走問題,所以可以不設(shè)置踝關(guān)節(jié)的側(cè)向旋轉(zhuǎn)自由度。這樣設(shè)計出的機器人雖然不能站在不規(guī)則的地面上,但可以在平地上完成所有的行走過程,實現(xiàn)前行、后退、轉(zhuǎn)彎等動作。
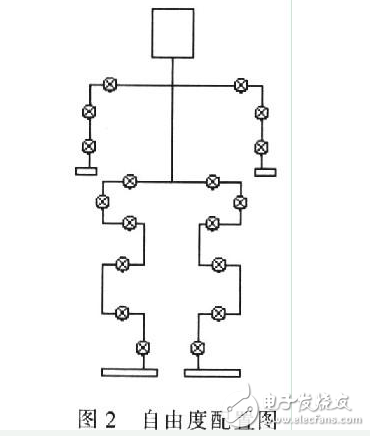
這樣設(shè)計出的機器人腿部共有12個自由度,每條腿各6個,即踝關(guān)節(jié)前向和扭轉(zhuǎn)2個自由度,膝關(guān)節(jié)前向1個自由度,髖關(guān)節(jié)有前向、側(cè)向旋轉(zhuǎn)和轉(zhuǎn)向3個自由度。自由度的設(shè)置如圖2所示。
1.2 機器人驅(qū)動元件的選擇
在驅(qū)動元件的選擇上,早期研究者曾試圖模仿人的肌肉運動方式用氣動人工肌肉作為雙足步行機的驅(qū)動元件,這種氣動人工肌肉通過橡膠管充氣膨脹引起的收縮來代替人體肌纖維的收縮運動,但由于技術(shù)水平的限制,人工肌肉在體積和力學(xué)特性等方面都與真正肌肉有較大差距,實際效果并不好。目前,大部分機器人采用伺服電機作為驅(qū)動元件。伺服電機具有速度快、扭矩大的特點,并配備雙向接口,能夠監(jiān)測當(dāng)前電機位置,因此得到廣泛應(yīng)用,并取得良好效果。
微型伺服電機內(nèi)部包括一個小型直流馬達、一組變速齒輪、一個反饋可調(diào)電位器及一塊電子控制板,是一種可定位的直流電機,當(dāng)接收到一個位置指令時,就會運動到指定的位置。微型伺服電機馬達具有高力矩、高性能、控制簡單、裝配靈活、價格低等優(yōu)點。從各方面因素考慮,本設(shè)計選用微型伺服電機作為驅(qū)動元件。該設(shè)計選用Robotis公司生產(chǎn)的AX-12+伺服電機,電機之間通過串口通信,由主控制器打包傳輸通信數(shù)據(jù)。
2 雙足機器人步態(tài)規(guī)劃
目前雙足機器人的步態(tài)規(guī)劃一般采用兩種方法:一種是應(yīng)用數(shù)學(xué)手段通過建立機器人的數(shù)學(xué)模型進行規(guī)劃,另一種方法是模擬人的行走過程及人的生理結(jié)構(gòu)。該設(shè)計采用后者。人類步行運動是以一條腿交替地作為支撐,向前擺動另一條腿,并伴以軀干和手臂的運動而實現(xiàn)的。其過程和機理非常復(fù)雜。研究表明:雙足機器人在平穩(wěn)步行的條件下,能夠?qū)崿F(xiàn)上身軀和下肢的運動解耦,并易于對下身軀的各個關(guān)節(jié)角進行角度規(guī)劃,因此可利用解耦控制分別控制上身軀和下身軀的運動,并且對下身軀的各個關(guān)節(jié)角實施規(guī)劃。因此。分析和模擬人類的步行運動時,應(yīng)重點抓住下肢的主要動作特點和要領(lǐng)。
2.1 人體步態(tài)周期研究
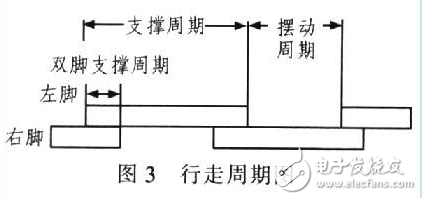
人體在行走的過程中,其重心不斷地周期性移動和改變,在任何時刻至少有一只腳與地面接觸,而其中一段是兩只腳同時著地。單支撐和雙支撐交替進行,但只有單支撐和雙支撐在行走周期中所占比例合理,才能保持身體平衡。以一個周期為研究對象,比例分配如圖3所示。
2.2 根據(jù)周期比例利用通用軟件規(guī)劃步態(tài)
由圖3可知,在一個完整的步態(tài)周期里包括2個雙支撐和2個單支撐時間,設(shè)置雙支撐占周期的20%,單支撐占周期的80%。對于單腿來說,整個周期里只有一個擺動周期,占周期的40%,支撐周期由一個單支撐和兩個雙支撐組成。占周期的60%。兩條腿的髖關(guān)節(jié)角度必須滿足式(1),才能保持行走時身體平衡。
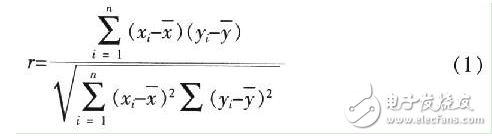
式中,r為髖關(guān)節(jié)的相關(guān)系數(shù),n為自由度,xi和yi分別是人類和機器人在第i次運動的髖關(guān)節(jié)角度,x和y分別是人類和機器人在一個周期內(nèi)髖關(guān)節(jié)運動角度的平均值。根據(jù)式(1)利用目前通用的機器人行為編輯軟件進行步態(tài)規(guī)劃,規(guī)劃結(jié)果如圖4所示。
根據(jù)圖4所示的步態(tài)規(guī)劃與仿真圖對所設(shè)計的機器人進行行走試驗。試驗結(jié)果表明,機器人在行走之前要有立正的準備姿勢,使其重心與身體所在平面與地面垂直,通過調(diào)整膝關(guān)節(jié)角度實現(xiàn)機器人的穩(wěn)定行走,證明了該算法可行。
結(jié)論
設(shè)計了一款結(jié)構(gòu)緊湊、外形美觀的小型雙足機器人本體,機器人共18個自由度,每條腿6個,每條臂3個,可用作科學(xué)研究平臺,也可用于機器人比賽。使用行為編輯軟件步態(tài)規(guī)劃所設(shè)計的機器人,所規(guī)劃的步態(tài)模式具有軌跡可達性和運動可控性,反映一種連續(xù)穩(wěn)定的自然行走模式。仿人模式的步態(tài)規(guī)劃方法從模仿人的角度很好反映擬人體生物機械的高效步行機理。采用模糊控制和專家控制理論,以步態(tài)穩(wěn)定狀態(tài)為輸入,非時間參考量軌跡的修正量為輸出,涮節(jié)機器人的瞬時步行速度和雙腳著地的周期比例,在線實時修正步態(tài),機器人可在不改變空間運動路徑的情況下實現(xiàn)動態(tài)穩(wěn)定步行。
-
雙足機器人
+關(guān)注
關(guān)注
1文章
22瀏覽量
11899 -
機器人技術(shù)
+關(guān)注
關(guān)注
18文章
193瀏覽量
31647
發(fā)布評論請先 登錄
相關(guān)推薦
【深聯(lián)華杯】雙足機器人
【Embedded Pi申請】六足機器人的創(chuàng)新研發(fā)
什么是龍人四足機器人?
ColorSky雙足機器人開源項目
足式機器人經(jīng)典資料
四足機器人
四足機器人的機構(gòu)設(shè)計
舞蹈雙足機器人的設(shè)計及實現(xiàn)

基于ZMP的雙足機器人動態(tài)步行控制研究

怎么樣才能設(shè)計仿人雙足機器人的機構(gòu)
平面液壓雙足機器人步態(tài)規(guī)劃及阻抗控制研究說明





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論