

摘 要:研究了具有不確定參數(shù)非線性系統(tǒng)的穩(wěn)定最優(yōu)模糊保代價(jià)控制問題。采用T-S模糊模型描述非線性系統(tǒng),對具有范數(shù)有界,時(shí)變參數(shù)不確定性的非線性系統(tǒng),得到了存在穩(wěn)定最優(yōu)模糊保代價(jià)控制器的充分條件,并推算出了相應(yīng)的線性矩陣不等式(LMI)形式。建立了永磁同步電動(dòng)機(jī)混沌系統(tǒng)的T-S模型,采用最優(yōu)模糊保代價(jià)控制器進(jìn)行控制,針對不含參數(shù)不確定性和含有參數(shù)不確定性兩種情況進(jìn)行仿真研究,均得到滿意的控制效果。
1 引言
混沌控制是當(dāng)前混沌運(yùn)動(dòng)研究的一個(gè)新領(lǐng)域。是實(shí)現(xiàn)混沌應(yīng)用的關(guān)鍵環(huán)節(jié)。多年來,人們對混沌運(yùn)動(dòng)的性質(zhì)產(chǎn)生了一些廣為接受的認(rèn)識(shí),即混沌軌道的長期趨勢是不可預(yù)言的,并且混沌運(yùn)動(dòng)是難以控制的。1990年E.Ott、C.Grebogi和J.A.Yorke提出控制混沌的思想(OGY控制)產(chǎn)生廣泛影響。以后十年,新的研究成果不斷涌現(xiàn)。以上方案無須改變系統(tǒng)固有參數(shù),即可實(shí)現(xiàn)對混沌系統(tǒng)的有效控制,但是,要求系統(tǒng)參數(shù)是定常的。當(dāng)混沌系統(tǒng)具有不確定參數(shù)時(shí),以上方案將失效。近年來,關(guān)于不確定參數(shù)的混沌系統(tǒng)的控制已引起重視。電力系統(tǒng)中存在著許多混沌現(xiàn)象。其中永磁同步電動(dòng)機(jī)的數(shù)學(xué)模型是多變量、強(qiáng)耦合的非線性系統(tǒng),能呈現(xiàn)出非常豐富的動(dòng)態(tài)行為,如極限環(huán)和混沌。對其如何進(jìn)行控制也是一個(gè)重要的研究課題。
對于不確定線性系統(tǒng),基于Riccati方程和線性矩陣不等式(LMI)提出了一系列的魯棒控制器設(shè)計(jì)方法。對于不確定非線性系統(tǒng),現(xiàn)有的研究成果還很少。實(shí)踐證明,具有線性后件的T-S模糊模型充分利用局部信息和專家經(jīng)驗(yàn),能以任意精度逼近實(shí)際的控制對象。在考慮模型不確定性的情況下,文獻(xiàn)提出了模糊魯棒控制的概念,并取得了一定的成果。本文針對一類由T-S模糊模型表示的不確定連續(xù)非線性系統(tǒng),導(dǎo)出了最優(yōu)保代價(jià)控制器存在的充分條件。閉環(huán)系統(tǒng)不但漸近穩(wěn)定,而且性能指標(biāo)小于某一代價(jià)值。采用線性矩陣不等式(LMI)技術(shù),給出了該控制器的設(shè)計(jì)方法和參數(shù)化表示。并將所得的控制器應(yīng)用到永磁同步電動(dòng)機(jī)混沌系統(tǒng)中,建立了永磁同步電動(dòng)機(jī)混沌系統(tǒng)的T-S模型, 針對不包含不確定參數(shù)和包含不確定參數(shù)兩種情況,均得到了滿意的控制效果。
2 問題的描述
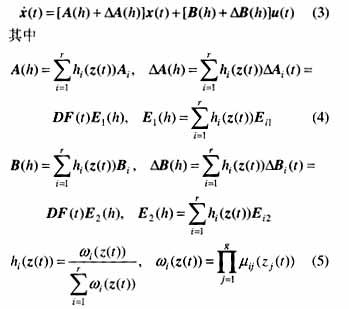
在系統(tǒng)局部信息或?qū)<医?jīng)驗(yàn)存在的條件下,不確定非線性連續(xù)系統(tǒng)可以采用如下i條規(guī)則的T-S模糊模型進(jìn)行描述:

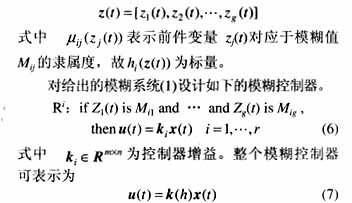
式中 Ri表示T-S模糊模型的第i條規(guī)則,也稱為模糊子系統(tǒng);Z1(t),…, Zg(t)為模糊規(guī)則的前件變量;Mij為模糊語言集合;x(t)∈Rn, u(t)∈Rm分別為系統(tǒng)的狀態(tài)變量和控制變量;Ai, Bi是適當(dāng)維數(shù)的實(shí)常數(shù)矩陣,DAi(t), DBi(t)是不確定矩陣,他們反映了系統(tǒng)模型中的時(shí)變參數(shù)不確定性。
本文考慮的不確定性假設(shè)是范數(shù)有界的且有如下結(jié)構(gòu):

的具有適當(dāng)維數(shù)的常數(shù)矩陣,它們反映了系統(tǒng)不確定性的結(jié)構(gòu),F(xiàn)(t)∈Rs×q是具有Lebesgue可測元的不確定矩陣,且滿足FT(t)F(t)≤I。
上述不確定性的結(jié)構(gòu)假定并不失一般性。首先,它可以表示一個(gè)含有裝置和不確定性F(t)的線性關(guān)聯(lián)的系統(tǒng);其次,有許多系統(tǒng),其不確定性可以按這種方式表示,例如,滿足“匹配條件”的不確定性就可以解釋成是通過輸入進(jìn)入到系統(tǒng)模型中的,即D為系統(tǒng)的輸入矩陣;最后對一般的范數(shù)有界不確定性,總可以選擇適當(dāng)?shù)慕Y(jié)構(gòu)矩陣,使其具有上面的形式。
采用文獻(xiàn)中的單點(diǎn)模糊產(chǎn)生器,乘積推理以及加權(quán)平均模糊消除器,上述的模糊邏輯控制系統(tǒng)可寫為如下形式中。
3 最優(yōu)保代價(jià)控制
首先給出保代價(jià)控制的定義,然后給出模糊不確定系統(tǒng)(3)的穩(wěn)定保代價(jià)控制器存在條件。在此基礎(chǔ)上利用線性矩陣不等式給出控制器的設(shè)計(jì)方法。
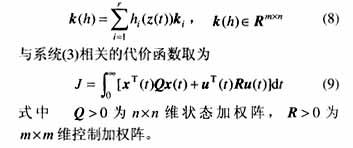
定義1(保代價(jià)控制)考慮不確定系統(tǒng)(3),如果存在控制律u*(t)和正標(biāo)量J*,使得對所有允許的不確定性FT(t)F(t)≤I,閉環(huán)系統(tǒng)是穩(wěn)定的,且代價(jià)函數(shù)(9)對此閉環(huán)系統(tǒng)滿足J≤J*,則稱J*是一個(gè)保代價(jià),而稱u*(t)是不確定系統(tǒng)(3)的保代價(jià)控制律。
下面給出不確定系統(tǒng)(3)狀態(tài)反饋保代價(jià)控制律存在的一個(gè)充分條件。
定理1式(7)的反饋控制律是一個(gè)保代價(jià)控制律,如果存在公共正定矩陣P∈Rn×n和矩陣k(h),使得對任意允許的不確定性F(t),有如下矩陣不等式
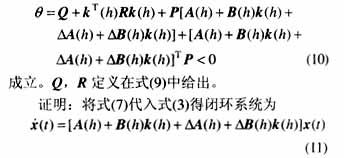
設(shè)存在對稱陣P》0使得矩陣不等式(10)對所有允許的不確定性成立。定義Lyapunov函數(shù)為
因此,由Lyapunov穩(wěn)定性理論,閉環(huán)模糊系統(tǒng)(11)是漸近穩(wěn)定的。

由定義1知定理1的結(jié)論成立。
下面將證明,上述推導(dǎo)的存在控制器使全局模糊系統(tǒng)漸近穩(wěn)定的充分條件,可等價(jià)于線性矩陣不等式的可解性。
定理2 對于系統(tǒng)(11),存在對稱正定矩陣P使不等式(10)成立,當(dāng)且僅當(dāng)存在一標(biāo)量e 》0,正定對稱矩陣X∈Rn×n和矩陣W(h)∈Rm×n滿足如下矩陣不等式

那么式(10)可被寫成式(22)

定理3 給定系統(tǒng)(1),存在保代價(jià)控制律(19)的條件是,存在公共正定矩陣X和矩陣Wj及標(biāo)量e,滿足如下線性矩陣不等式

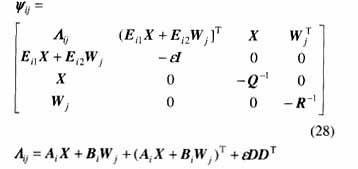
證明:由不等式(18)和式(4)可知,不等式(18)左邊等于

有解ε,α,W,X,則式(19)的控制律是一個(gè)無記憶狀態(tài)反饋控制律,它使得不確定系統(tǒng)(3)的代價(jià)函數(shù)的極小值為式(20)。
證明: 根據(jù)定理2,由任意可行解ε,α,W,X所構(gòu)造的控制律(19)是系統(tǒng)(3)的一個(gè)保代價(jià)控制律。由Schur補(bǔ)引理可知,式(29)中的條件(2)等價(jià)于
所以,由方程(20)有J*《α。
于是,極小化α隱含極小化不確定系統(tǒng)(3)的代價(jià)函數(shù)。而式(29)中,目標(biāo)函數(shù)和約束條件的凸性,保證了該優(yōu)化問題的最優(yōu)性。
4 永磁同步電動(dòng)機(jī)混沌系統(tǒng)的T-S建模與控制
4.1 T-S建模
將上述控制器應(yīng)用到文獻(xiàn)[5-6]的永磁同步電動(dòng)機(jī)混沌系統(tǒng)。
考慮加上一個(gè)控制項(xiàng)的永磁同步電動(dòng)機(jī)有如下形式的數(shù)學(xué)模型(其原模型見文獻(xiàn)[5-6])
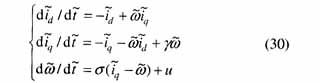

仿文獻(xiàn)的建模過程,對永磁同步電動(dòng)機(jī)建立T-S模型。將非線性項(xiàng)x3(t)x2(t),x3(t)x1(t)寫成線性函數(shù)加權(quán)和的形式。
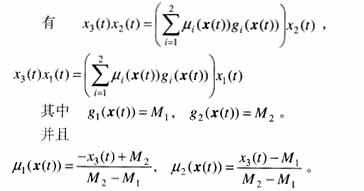
因?yàn)閮煞蔷€性項(xiàng)都是x3的函數(shù),則可以構(gòu)造如下精確T-S模型。
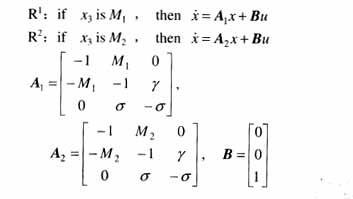
知x3(t)∈[-20,20],所以選擇M1=-20,M2=20。由推導(dǎo)過程可看出M1,M2是一類特殊的模糊集合,即精確的數(shù)值。是一種精確建模,無建模誤差。
4.2 系統(tǒng)不含不確定參數(shù)時(shí)的最優(yōu)保代價(jià)控制
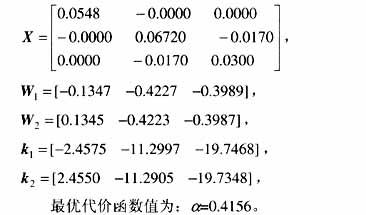
此時(shí),DAi(t), DBi(t)都為0,故D,Ei1,Ei2也都為0。簡單取e=0.1,R=1,Q=I由式(27),(29)得
取式(7)的控制律,在初始條件為x0=(0.01 0.01 0.01)T,u=0及在t=60s加入控制項(xiàng)的仿真結(jié)果如圖2所示,可看出加入控制項(xiàng)后系統(tǒng)趨于穩(wěn)定。
4.3 系統(tǒng)包含不確定參數(shù)時(shí)的最優(yōu)保代價(jià)控制
假設(shè)系統(tǒng)參數(shù)g,s 的不確定性在其標(biāo)稱值30%內(nèi)。其不確定性代表參數(shù)攝動(dòng)或建模誤差。在參數(shù)30%攝動(dòng)下,系統(tǒng)仍呈現(xiàn)混沌行為。仿真中每個(gè)參數(shù)加30%隨機(jī)擾動(dòng),由MATLAB中的rand( )隨機(jī)函數(shù)實(shí)現(xiàn),則有
取式(7)的控制律,在初始條件為x0=(0.01 0.01 0.01)T,u=0及在t=60s加入控制項(xiàng)的仿真結(jié)果,可看出加入控制項(xiàng)后,不確定參數(shù)系統(tǒng)趨于穩(wěn)定。
加入控制項(xiàng)實(shí)現(xiàn)了不含參數(shù)不確定性和含有參數(shù)不確定性混沌系統(tǒng)的穩(wěn)定控制。系統(tǒng)狀態(tài)由原來的混沌運(yùn)動(dòng)迅速達(dá)到平衡點(diǎn)。本文的控制方法與OGY法的小信號(hào)輸入法不同,系統(tǒng)狀態(tài)遠(yuǎn)離目標(biāo)狀態(tài)時(shí),啟動(dòng)控制作用,即可將系統(tǒng)狀態(tài)控制到目標(biāo)狀態(tài),而與輸入加入的時(shí)刻無關(guān)。
5 結(jié)論
基于T-S模糊模型,給出了存在穩(wěn)定最優(yōu)模糊保代價(jià)控制器的充分條件和相應(yīng)的LMI形式。應(yīng)用到永磁同步電動(dòng)機(jī)混沌系統(tǒng)的穩(wěn)定控制中,建立了永磁同步電動(dòng)機(jī)混沌系統(tǒng)的T-S模型,對不包含不確定參數(shù)和包含不確定參數(shù)兩種情況,取得了滿意的控制效果。不需要改變被控系統(tǒng)的內(nèi)部結(jié)構(gòu),具有良好的穩(wěn)定性,且能達(dá)到某一性能指標(biāo)最優(yōu)。
-
混沌控制
+關(guān)注
關(guān)注
0文章
3瀏覽量
6204 -
永磁同步電動(dòng)機(jī)
+關(guān)注
關(guān)注
14文章
75瀏覽量
12185
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
永磁同步電機(jī)直流母線能量互饋試驗(yàn)系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
如何正確選擇交流電動(dòng)機(jī)變頻調(diào)速控制方案?

永磁同步電動(dòng)機(jī)開環(huán)控制的變頻調(diào)速系統(tǒng)有何特點(diǎn)?
永磁同步電動(dòng)機(jī)隨機(jī)PWM技術(shù)研究
勵(lì)磁電動(dòng)機(jī)靜態(tài)的勵(lì)磁電壓是多少






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論