") NI針對自動化和定制化的測試需求提出兩種平臺化方案
NI針對自動化和定制化的測試需求提出兩種平臺化方案
NI平臺化方法的優(yōu)勢
據(jù)麥姆斯咨詢介紹,美國國家儀器(National Instruments,簡稱NI),作為一家專注于測試、測量、自動化解決方案的領(lǐng)先企業(yè)。在自動駕駛的領(lǐng)域里,NI服務(wù)于汽車產(chǎn)業(yè)鏈上的各芯片廠、零部件廠、主機(jī)廠,為它們在自動駕駛研發(fā)過程中,提供產(chǎn)線測試和實(shí)驗(yàn)室輔助驗(yàn)證的解決方案。儀器是測試最重要的媒介和手段。NI針對自動化和定制化的測試需求,提出了兩種平臺化方案,一個(gè)是虛擬儀器,第二個(gè)是圖形化軟件。平臺化的核心概念是允許用戶做自定制,然后基于模塊化硬件來提高系統(tǒng)的重用性。凡是使用過NI儀器的用戶,都知道NI儀器是沒有界面的,所有界面都是客戶自定制的界面。NI所提供的儀器也沒有主機(jī),而是由一個(gè)個(gè)模塊和一個(gè)個(gè)網(wǎng)卡組成,所有儀器就像自動駕駛系統(tǒng)一樣,可拆分成為感知、決策、執(zhí)行三個(gè)部分。儀器主要承擔(dān)輸入輸出和計(jì)算兩個(gè)部分,其中NI提供的是輸入輸出,計(jì)算部分利用商用計(jì)算機(jī)平臺,統(tǒng)一整合起來就可以實(shí)現(xiàn)集成化的方法(如圖1)。
圖1 平臺化方法的優(yōu)勢NI在自動駕駛領(lǐng)域的解決方案從2017年開始,在公司戰(zhàn)略層面上,NI定義了新的發(fā)展方向,未來將關(guān)注的四個(gè)行業(yè)方向分別是(圖2):半導(dǎo)體、汽車、航空航天、科研院所。這四個(gè)方向里面,除了平臺之外,更進(jìn)一步需要積累針對于行業(yè)的實(shí)際方案。
圖2 NI汽車解決方案
自動駕駛測試驗(yàn)證的目的是什么?
主要是驗(yàn)證系統(tǒng)高可靠性以確保自動駕駛的安全性。絕對安全是一個(gè)非常遙遠(yuǎn)的概念,要證明自動駕駛比人工駕駛更安全,最基礎(chǔ)的手段就是進(jìn)行大量的路測數(shù)據(jù)比對。對人工駕駛而言,即便是常規(guī)的安全性測試門檻也很高。根據(jù)美國交通部統(tǒng)計(jì)數(shù)據(jù),全美所有司機(jī)一年駕駛里程大概3萬億英里,一年內(nèi)美國發(fā)生的傷害事故大概2300萬起,致命死亡事故大概32000起。這意味著在人工駕駛的情況下,發(fā)生一例死亡事故的平均駕駛里程是1億英里。那么要證明自動駕駛比人工駕駛更安全,路測的基礎(chǔ)里程應(yīng)該是多少?在今年4月,NI在首爾舉辦的一場活動中,梅賽德斯奔馳的測試人員透露,到現(xiàn)在為止他們在44款項(xiàng)目上,總共做了900萬英里的路測。截止2018年3月,Waymo自動駕駛的路測里程超500萬英里。這個(gè)數(shù)據(jù)和我們要達(dá)到的一個(gè)駕駛員平均1億英里的安全行駛里程還有很大差距,所以純粹用路測來驗(yàn)證安全性,其成本和負(fù)擔(dān)非常大(圖3)。
圖3 驗(yàn)證無人駕駛的安全性需要大量的測試
NI提供的方法,將作為路測的輔助,實(shí)現(xiàn)在軟件、硬件、零部件和臺架的平臺上通過硬件在環(huán)(HIL)安全性驗(yàn)證。講到硬件在環(huán),基本的核心概念就是把車輛抽象為一個(gè)模型,包括動力總成、底盤、剎車、ADAS。傳統(tǒng)的做法,是將這些都通過參數(shù)化的方法進(jìn)行配置和仿真,把真實(shí)的控制器和可靈活配置的場景模擬器進(jìn)行互聯(lián),從而替代一部分路測功能。而NI在傳統(tǒng)硬件在環(huán)測試上添加了新的功能,使ADAS能夠在硬件在環(huán)領(lǐng)域進(jìn)行驗(yàn)證。ADAS的測試對象,主要包括雷達(dá)、攝像頭、激光雷達(dá)、ADAS以及后端的節(jié)點(diǎn)(圖4)。
圖4 主要的ADAS測試對象
NI針對雷達(dá)、攝像頭、V2X的硬件在環(huán)測試(1)雷達(dá)毫米波雷達(dá)探測的原理和蝙蝠、海豚很像,是通過微波在空間反射時(shí)間的延遲判斷距離,通過反射波形的頻移判斷對象是在接近還是在遠(yuǎn)離。所以在仿真驗(yàn)證的平臺上,同樣可以通過高效、高速的硬件在微波傳輸?shù)臅r(shí)間內(nèi),利用軟件實(shí)現(xiàn)對雷達(dá)發(fā)射波頻譜的頻移以及時(shí)間疊加,讓雷達(dá)誤以為是一個(gè)真實(shí)目標(biāo)。NI現(xiàn)在的仿真測試,可以實(shí)現(xiàn)的主要參數(shù)指標(biāo)為(圖5):目標(biāo)距離4米到500米,距離分辨率可達(dá)0.1米,速度分辨率可達(dá)0.1公里/小時(shí)。這些參數(shù)指標(biāo)滿足現(xiàn)在市場主流的需求。
圖5 NI汽車?yán)走_(dá)測試系統(tǒng)
主要參數(shù)指標(biāo)成功案例:在2017年的上海汽車展上,NI汽車?yán)走_(dá)測試系統(tǒng)(VRTS)已經(jīng)成功發(fā)布。中國汽車技術(shù)研究中心(簡稱中汽研),在NI的平臺上通過回波模擬的方法,驗(yàn)證了自動駕駛開發(fā)階段的場景以及安全性指標(biāo)。在這個(gè)平臺上目前可實(shí)現(xiàn)三種常見場景的仿真測試(圖6),分別是ACC(自適應(yīng)巡航)、FCW(前方碰撞預(yù)警)相關(guān)標(biāo)準(zhǔn)中定義的場景以及C-NCAP 2018版中AEB(自動緊急制動)定義的典型場景。
圖6 基于VRTS實(shí)現(xiàn)的測試場景
NI與中汽研合作,根據(jù)中國交通事故數(shù)據(jù)庫,未來也將在中國道路上的常見事故數(shù)據(jù)加載到這樣一個(gè)平臺上,以針對常見事故進(jìn)行仿真和驗(yàn)證。這里有幾個(gè)問題需要解決——場景怎么去加載?仿真是否和真實(shí)路況場景一樣逼真?NI的解決辦法主要是通過和第三方的場景建設(shè)軟件進(jìn)行互聯(lián),譬如和兩家比較主流的場景軟件公司合作,分別是PreScan和Carmaker。NI可以做到從場景仿真軟件上提取要在硬件上仿真的對象坐標(biāo),通過回波模擬器將實(shí)際信號和場景實(shí)時(shí)互聯(lián),然后發(fā)射到真實(shí)的雷達(dá)上,來實(shí)現(xiàn)仿真。
圖7 第三方場景軟件互聯(lián)
如圖7,為NI在2017年初在辦公室內(nèi)做的一個(gè)演示,展示了互聯(lián)的實(shí)現(xiàn)過程。仿真展示的左側(cè)是場景和動力學(xué)模型的仿真環(huán)境,演示仿真了一輛車在高速軋道上并道并跟隨前車ACC的場景。這是一個(gè)雷達(dá)的交互界面,雷達(dá)所探測到的實(shí)時(shí)目標(biāo)會在這個(gè)界面上進(jìn)行顯示。右側(cè)演示仿真了真實(shí)的雷達(dá)在前面,后面有回波模擬器的路況場景。當(dāng)這個(gè)場景運(yùn)行起來以后,這輛車開始做自主尋道,然后做軋道并道和跟車。這個(gè)場景的構(gòu)建是在場景模擬器里面直接構(gòu)建的,從場景模擬器里面對象的坐標(biāo)到提取到一個(gè)真實(shí)的回波模擬,再產(chǎn)生雷達(dá)的實(shí)時(shí)回波,最后被真實(shí)的雷達(dá)探測到,這兩邊的數(shù)據(jù)是同步的。所以就能在零部件階段驗(yàn)證雷達(dá)傳感器以及雷達(dá)算法,在一個(gè)并道場景中的表現(xiàn)。(2)攝像頭NI針對攝像頭自定制的協(xié)議,采用自定制的卡來實(shí)現(xiàn)和測試與主機(jī)的互聯(lián)。由于可以做自定制,所以適用于不同相機(jī)的傳輸協(xié)議的用戶定制(圖8)。比如,NI與法雷奧合作的案例,在歐洲和中國對法雷奧相機(jī)的數(shù)據(jù)轉(zhuǎn)換生產(chǎn)性測試和研發(fā)互聯(lián)就用到了這種解決方案。
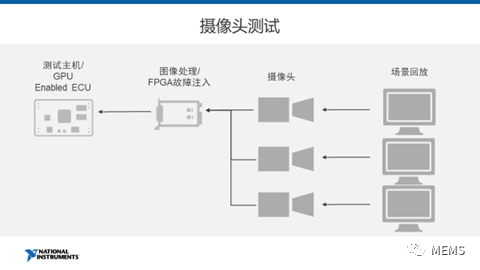
圖8 攝像頭
測試(3)V2X2017年,國家無線電檢測中心在天津車檢院做了一個(gè)仿真測試:仿真了兩輛車在90度直角障礙物遮擋的情況下,測試V2X最遠(yuǎn)通信距離能夠達(dá)到多少?以及在彎道、直道高速的情況下,車車通信協(xié)議上連接距離是多少?到現(xiàn)在為止大家還停留在用仿真器做V2X通信的階段,但是NI已經(jīng)儲備了將V2X連接到硬件在環(huán)的能力。NI會提供一些模塊,用來模擬車載節(jié)點(diǎn),以實(shí)現(xiàn)車和車之間的數(shù)據(jù)通信。包括NI會對一些V2X模塊的一致性等做測試。比如,NI在德國的一個(gè)案例(圖9),在V2X的研發(fā)階段用了V2X節(jié)點(diǎn)做算法開發(fā)。
圖9 V2X HIL
測試傳感器融合硬件在環(huán)的解決方案以上分別提到了雷達(dá)、攝像頭、V2X的測試,最后回到融合的話題。在實(shí)際路況上,對象同步性是顯而易見的,當(dāng)真實(shí)道路上出現(xiàn)一個(gè)人,攝像頭、雷達(dá)、V2X看到這個(gè)人一定是同步的。但是在仿真測試的環(huán)境下,要通過視覺場景、雷達(dá)回波模擬器、射頻發(fā)射節(jié)點(diǎn)三個(gè)不同源頭去模擬真實(shí)路況的場景。
圖10 基于PXI平臺實(shí)現(xiàn)融合測試需求
實(shí)現(xiàn)三者的同步技術(shù),保證仿真和實(shí)際路況盡可能接近,是一個(gè)關(guān)鍵挑戰(zhàn)和趨勢。得益于本文開頭所講的虛擬化儀器平臺(圖10),通過在同一臺主機(jī)上實(shí)現(xiàn)三個(gè)對象的仿真,在有必要的情況下通過交互,能夠?qū)崿F(xiàn)毫秒及亞毫秒級的數(shù)據(jù)同步,來保證和驗(yàn)證融合算法的時(shí)候仿真對象是真實(shí)的。這是到目前為止最全的一種傳感器融合硬件在環(huán)的解決方案。去年,NI在美國和上海分別做了一次演示。
圖11 傳感器融合硬件在環(huán)測試如圖11,左上角是毫米波雷達(dá)仿真,左下角是一個(gè)攝像頭仿真,右上角是激光雷達(dá)仿真,右下角是第三視角界面。三個(gè)仿真是完全同步的,所以在進(jìn)行超車動作時(shí),三種傳感器的感知融合很統(tǒng)一。
汽車?yán)走_(dá)產(chǎn)線測試
從實(shí)驗(yàn)室到生產(chǎn)線,除了整車廠研發(fā)驗(yàn)證之外,NI在國內(nèi)外給很多的傳感器供應(yīng)商產(chǎn)線做質(zhì)量測試,以及針對汽車?yán)走_(dá)的車規(guī)測試(圖12)。在高低溫環(huán)境里測試?yán)走_(dá)功能來驗(yàn)證它是否符合車規(guī),以及在EMI、EMC場景下怎么來驗(yàn)證雷達(dá)。甚至針對匹配車型的測試,將雷達(dá)裝在了某一個(gè)特定的材料上面。涂料、形狀、金屬會對雷達(dá)產(chǎn)生怎樣的影響,NI都做了深入的研究。
圖12 汽車?yán)走_(dá)產(chǎn)線測試
結(jié)語
2017年7月全球首款實(shí)現(xiàn)Level-3(SAE)級別自動駕駛的量產(chǎn)車奧迪A8成功發(fā)布,而在成功之前對其自動駕駛技術(shù)安全可靠的驗(yàn)證,結(jié)合了路測和硬件在環(huán)兩種技術(shù),而NI正是其中硬件在環(huán)技術(shù)的供應(yīng)方。由此可見,基于NI平臺化方法,加上合作伙伴的集成模塊和軟件,NI能幫助汽車廠商實(shí)現(xiàn)從傳統(tǒng)的車身動力總成到最新的涵蓋智能化、網(wǎng)聯(lián)化和電氣化的智能汽車測試項(xiàng),且能為廠商/研究機(jī)構(gòu)提供從實(shí)驗(yàn)室研發(fā)到量產(chǎn)測試的全方位解決方案。
-
NI
+關(guān)注
關(guān)注
19文章
1123瀏覽量
100353 -
自動駕駛
+關(guān)注
關(guān)注
784文章
13826瀏覽量
166492
原文標(biāo)題:NI推出基于平臺化方法的新一代智能汽車測試技術(shù)
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
串口屏自動化測試
網(wǎng)絡(luò)及診斷自動化測試軟件集成方案

開關(guān)電源自動化測試設(shè)備:如何實(shí)現(xiàn)自動化測試?

電源ATE自動測試系統(tǒng)的定制化測試柜

合肥某公司無源器件S參數(shù)與互調(diào)自動化測試案例分享
XLT高速線纜自動化測試系統(tǒng)
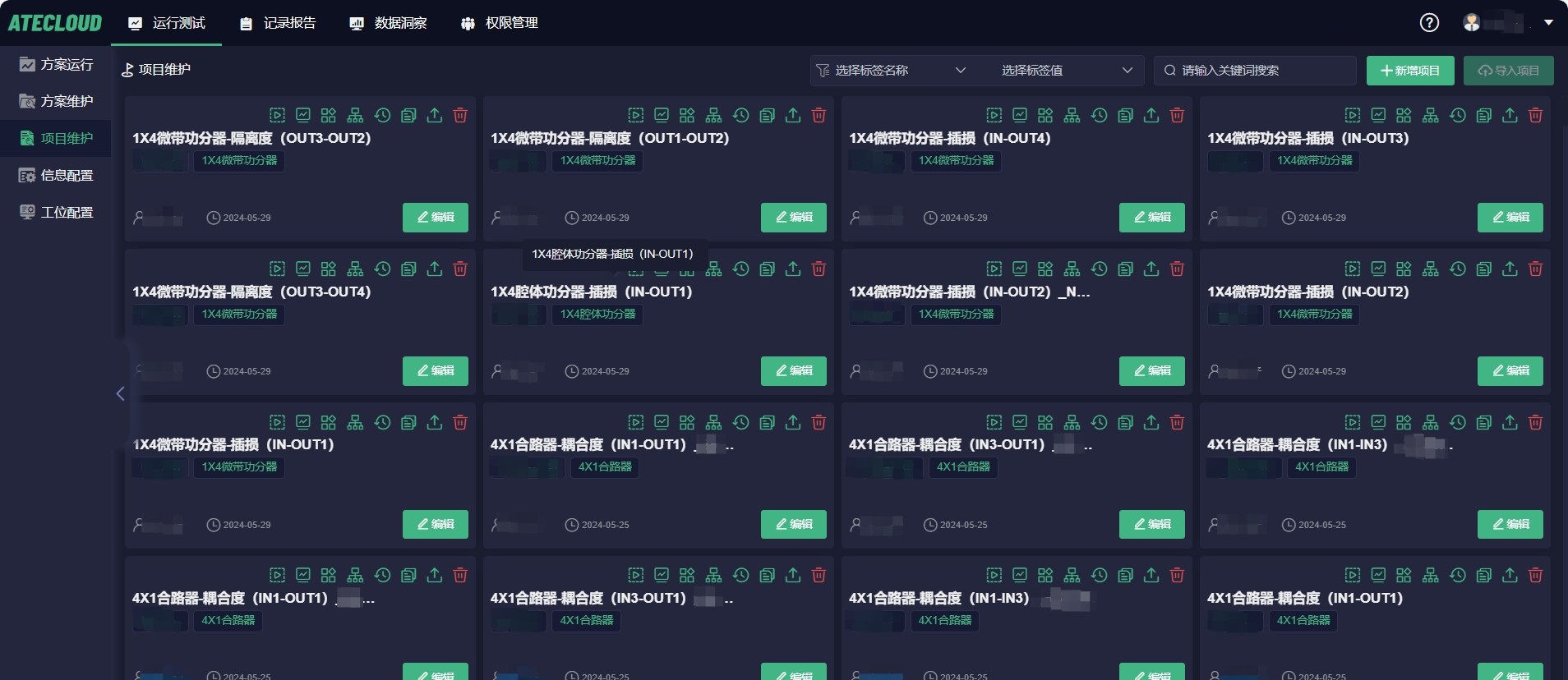
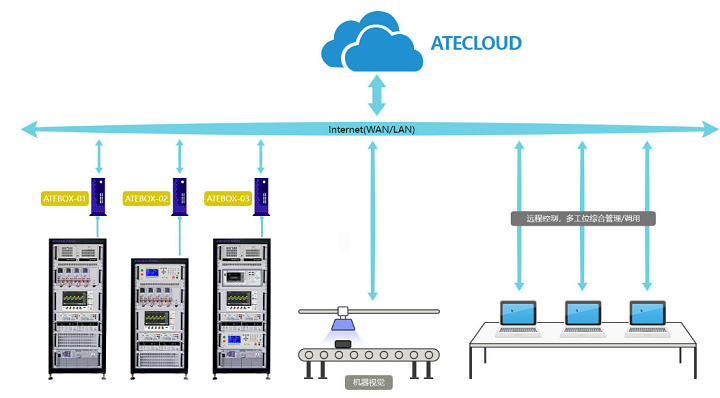
ATECLOUD智能云測試平臺推動自動化測試發(fā)展
OTA自動化測試解決方案——實(shí)車級OTA測試系統(tǒng)PAVELINK.OTABOX
機(jī)械自動化和電氣自動化區(qū)別是什么
機(jī)械自動化是自動化的一種嗎
工業(yè)自動化和自動化區(qū)別是什么
納米軟件自動化測試合作:4644芯片與VPX模塊測試
納米軟件分享:電源管理芯片自動化測試方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論