

2018自主泊車與代客泊車論壇在北京御湯山商務(wù)會所召開。來自美國傲酷公司亞太區(qū)總裁郄建軍,前高德負責(zé)移動業(yè)務(wù)群的副總裁,曾經(jīng)一手打造高德地圖APP,從零起步做到幾億用戶。他的演講題目是《毫米波雷達的新時代—4D點云雷達》。
公司介紹
美國傲酷公司是一家提供毫米波雷達及其解決方案的公司。其最新研發(fā)的4D高清點云成像雷達,可在全天候全時段提供高分辨率的4D(3D位置+1D速度)點云成像,可謂世界首創(chuàng)。該已獲得三星等國際巨頭的投資和合作意向。目前正在中國市場廣泛布局,重點開拓ADAS、無人駕駛、無人物流、智能交通、安防邊控、機器人等市場。
郄建軍:大家上午好!提及我做過的行業(yè),從93年開始和通信行業(yè)打交道,從那時起就跟泰爾實驗室打交道,感覺非常親切。后來我又在高德地圖工作過。
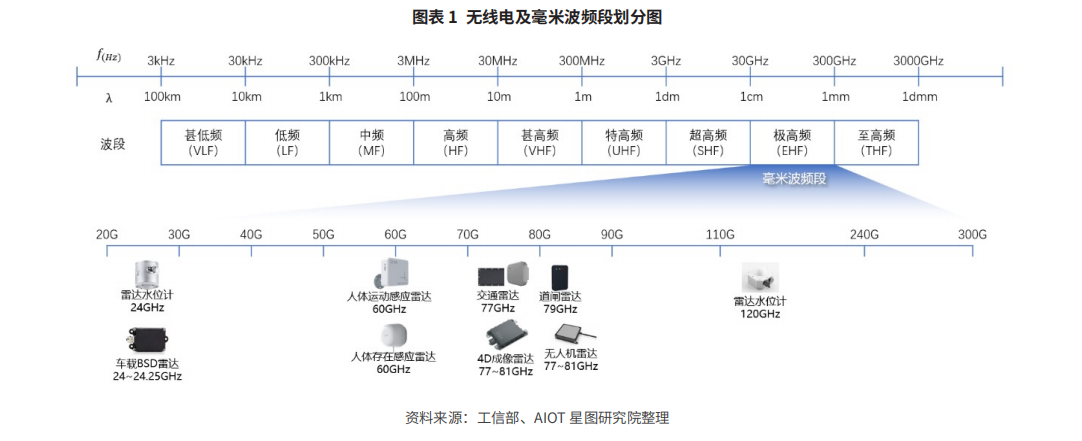
現(xiàn)在做毫米波雷達,跟地圖、導(dǎo)航也相關(guān)。毫米波雷達用于障礙物探測,大家非常熟悉。提及毫米波雷達,都覺得是大陸、博世、德爾福那幾家國際巨頭,過去十幾年在技術(shù)上沒有重大突破和創(chuàng)新。
我們現(xiàn)在要做的,就是將毫米波雷達做革命性的改變,打破原來的傳統(tǒng)格局。以前的智能駕駛系統(tǒng)要么以攝像頭為主,要么以激光雷達為主,為何不能以毫米波為主?它的局限主要在于分辨率及精度低,不能成像。
毫米波雷達的優(yōu)點是全天候、長距離探測。那么有沒有可能既能吸取它的優(yōu)點,全天候、長距離;同時又能成像?激光雷達能做的事情,毫米波雷達能不能做一部分?
答案是肯定的,我們的點云毫米波雷達產(chǎn)品就可以做到!
下面我們看如何用4D點云雷達做到既長距離、又全天候,又能成像。
我們做了第一代的點云雷達Falcon系列,就是上圖前端凸出部分,只有名片那么大。后面還配置了攝像頭,是為了演示方便,可以看到疊加之后的效果。
點云毫米波雷達可以連續(xù)跟蹤空間中任何一個點的4D信息(3D位置+1D速度)。我們做成點云,不是目標級的跟蹤,而是像激光一樣一點一點地電子掃描,每個雷達每秒鐘掃描5萬點。探測距離是200米以上,并能全天候工作。效果接近于激光雷達。激光雷達在車規(guī)級量產(chǎn)和成本控制方面挑戰(zhàn)比較大。而毫米波雷達由于電路比較簡單,容易做到車規(guī)級量產(chǎn),同時保持毫米波雷達的價格范圍。
下圖是我們點云雷達安裝在車上的示意圖。
在停車場場景里,這就是1萬多點/秒的點云掃描后的效果,可以顯示兩邊停靠車輛的間距、長寬和高度,我們看到的小方塊和空隙的地方是空車位。掃描過去之后,空間環(huán)境都能看清楚,能達到厘米級精度。
毫米波雷達有透視功能。一臺車過去,到底前面是否有停車位,毫米波可以通過車底和車窗穿透探測前方車輛的車間距,并預(yù)知空車位。
4D點云雷達做路徑規(guī)劃的優(yōu)勢
我們做路徑規(guī)劃和防撞的時候,就怕橫穿,突然冒出一個人或者車輛。其實最難的也是中國的十字路口,交通狀況非常復(fù)雜。很多行人、汽車、卡車、公交車、自行車、三輪車等混雜在一起,對所有運動目標的連續(xù)跟蹤尤為重要,以便預(yù)測他們的運動軌跡從而做出正確的決策。
人眼有一個特點,就是對運動物體很敏感。攝像頭和激光雷達沒有這個特點,算完之后才能知道這個人在運動,但毫米波雷達恰恰類似人眼,對運動物體很敏感。
我們的點云毫米波雷達可以在第一時間跟蹤路口所有運動目標的軌跡,用單雷達芯片就能很快計算出他們的速度,不需要大量運算。所以我覺得這是我們的點云毫米波雷達對無人駕駛最大的貢獻。
再看一下累積模式,我們把過去三秒鐘的點云數(shù)據(jù)積累起來,可以看清楚車輛和行人的軌跡。所以在做路徑規(guī)劃的時候,可以很好的預(yù)測前方物體的路徑,預(yù)測下一時間段有什么人、什么車經(jīng)過,以及運動方向。
用4D點云雷達識別路邊馬路牙子、草地等靜止物體
周邊一團一團的是樹冠,前面是路邊的車,包括前面停的這輛車。移動物體在中間,靜態(tài)和動態(tài)的都能看清楚。
接著走到一個停車場,在停車場里,可看到對車輛周邊環(huán)境的跟蹤,右邊有兩輛車,最后進入停車場。
進入停車場以后,兩側(cè)的車非常多,車之間有間隙。大家看上邊框圖里展示的是高度信息。再有一個月,我們的軟件就能做出3D展示效果,現(xiàn)在平面的展示效果可變成立體的展示并可以切換視角。我們在自主泊車場景非常有用,能看到100米內(nèi)車輛的形狀和距離,并能提前識別空車位。
對靜態(tài)物體的判斷上,我們的點云毫米波雷達在靜止的狀態(tài)下也能對周邊靜態(tài)物體進行有效檢測(如下圖)。現(xiàn)在的發(fā)射點數(shù)還比較少,有點模糊,但大概能分辨出來,從高度來看,就是一個灌木叢,一棵樹和一塊石頭。另外右邊有三輛車,中間有個停車位,所以這就是對周邊靜態(tài)環(huán)境的認識,對停車來說有幫助。
對周邊障礙物的持續(xù)檢測,Ibeo 4線激光雷達對馬路圍欄和馬路牙子的跟蹤是斷斷續(xù)續(xù)的。車過去以后,通過4D點云毫米波雷達,旁邊的馬路牙子看的很清楚,是連續(xù)的。
點云雷達也可以做SLAM定位。通過探測路兩邊的欄桿、馬路牙子,以及交通標志與車之間的距離,可以反向高精度定位我的位置。
如果放大點云雷達,每個框里有好多點,這個點是非常密集的。現(xiàn)在的點還不夠密集,明年要做到每個雷達掃描50萬點/秒。
這就是點云放大后,用3D軟件做出來的效果,可以看到車、人的數(shù)據(jù),將這些數(shù)據(jù)做分類識別,可以看到車的大小、是人還是三輪車+人。
在無人駕駛里,毫米波雷達原來一直是個配角,L4/L5方案一般是采用攝像頭+激光雷達+超聲波雷達阿德方案。但在天氣不好的時候(比如雨、霧、霾、雪、黑夜、陽光直射)毫米波雷達的作用就凸顯出來。如果毫米波也能做到高分辨率、能成像,也就是我們在做的4D點云雷達,它就能徹底改變傳感器格局,可以作為主傳感器來做自主泊車、行人檢測、SLAM等應(yīng)用。
毫米波雷達和攝像頭的融合方案性價比高
毫米波適合做測距、測速,再加上全天候工作,再配上攝像頭,就變成低成本、全天候的完整解決方案。
為了實現(xiàn)更好的解決方案,我們下一步要做的是提高角精度。就是要把每秒發(fā)射5萬點變成50萬點,并達到4CM距離分辨率、0.1度角分辨率。
如果毫米波雷達多了會互相干擾,那么通過數(shù)字網(wǎng)算法,抗干擾能力也強了。要把毫米波雷達變成數(shù)字雷達,需要具備抗干擾能力。同時硬件不變,不斷的增強軟件,可以定義不同的點云。
最核心的是毫米波雷達數(shù)據(jù)跟攝像頭數(shù)據(jù)做點對點的融合。攝像頭有擅長的地方,比如目標、深度學(xué)習(xí)等等,毫米波擅長測距、測速。,如果能把攝像頭跟點云毫米波雷達進行點對點配合,就可以和激光雷達完美互補了。
-
攝像頭
+關(guān)注
關(guān)注
60文章
4873瀏覽量
96570 -
激光雷達
+關(guān)注
關(guān)注
969文章
4046瀏覽量
190691 -
毫米波雷達
+關(guān)注
關(guān)注
107文章
1060瀏覽量
64650
原文標題:傲酷郄建軍:毫米波雷達的新時代—4D點云雷達
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
毫米波雷達信號的傳輸特性
毫米波雷達與超聲波雷達的區(qū)別
毫米波雷達技術(shù)優(yōu)勢分析 毫米波雷達在安防監(jiān)控中的應(yīng)用
毫米波雷達工作原理 毫米波雷達應(yīng)用領(lǐng)域

物聯(lián)網(wǎng)中的高分辨率精確距離測量方案_毫米波雷達

毫米波雷達感應(yīng)Demo

毫米波雷達與超聲波雷達的區(qū)別是什么
毫米波雷達與多普勒雷達區(qū)別是什么
簡述毫米波雷達的結(jié)構(gòu)、原理和特點
毫米波雷達具有哪些特點和優(yōu)勢
2024款星越L不要毫米波也要留著8個超聲波雷達!

基于毫米波雷達的手勢識別算法
毫米波雷達在日常生活中的應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論