 P-NUCLEO-IHM001電機開發板介紹
P-NUCLEO-IHM001電機開發板介紹
P-NUCLEO-IHM001電機開發板介紹
由于STM32的電機測評活動,筆者得到一塊P-NUCLEO-IHM001板子,板子很精致,還附帶了電機和電源。
板子分為兩個部分,一個是STM32F302核心板
另一塊是電機驅動板,通過插座連接,便于更換。
核心板上部為板載ST-LINK,同時引出串口。核心板STM32F302通過ST-LINK引出的MCO作為時鐘源,板載按鍵連接至PC13,作為電機啟停按鍵。驅動板自帶電位器可用于電機調速連接至PB1即為ADC1的12通道,通過改變跳線,可以選擇單電阻或三電阻的電流取樣方式。還引出DAC接口。
我在官網下載了X-CUBE-MCSDK-FUL5.0.3的全開源版本(需要申請),并安裝。其他必備的軟件包括STM32CubeMX、KEIL MDK 5、STMStudio等。
PID整定與負載測試
計劃:首先將電流環(Id、Iq),速度環PID置零。然后先使用電流環調整電流PID,然后調整速度環PID。
思路:P即為比例,I為積分,首先在i為0的情況下,調整P,增大P使其可以達到目標,然后適當減小P再加入積分環節。如果要增大調節速度,同時按比例增加P和I即可。
實際操作過程:(開環啟動部分的就不動了)設置電機工作在電流環模式下,Torqueref參考電流設置為2000。
1.將P調到4000時電機輕微抖動,但是轉不動,接下來增加I
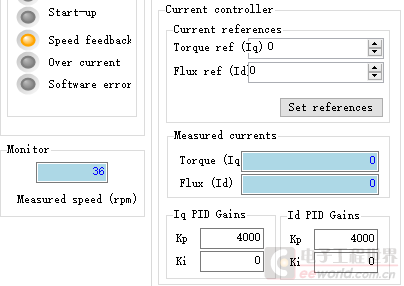
2.增大i到50時電機正常啟動并進入閉環,但是觀察Iq,出現的峰值偏大,故減小P。
3.目標參考為2000,實際觀察中Iq波動較大,不穩定,故增大I。
4.經過調整后,參數如下,電流基本穩定。
5.調整速度環PID,增大P使速度基本可以跟隨調節(軟件界面調速)時的目標速度,實測大概P到1000的時候速度基本跟隨。
6.這時增大I使系統穩定,同時快速的到達目標速度。實測I為200時基本穩定。
PID整定完成,自擬任務完成
更多評測
筆者陸續完成了以下電機測評任務,并做了詳細的圖文介紹,可通過閱讀原文下載查看。
任務一:電機運行時, 使用P-NUCLEO-IHM002測量 三電阻電流采樣波形,并且通過DA 輸出此波形, 并且截圖
任務二:得到FOC控制時的關鍵變量:Ia, Ib, Ic, Ialpha, Ibeta, Id, Iq, Vd, Vq , 并且截圖
任務三:監控任意數據變量,并且截圖
進階任務:新舊版本電機庫SDK4.3和SDK5.0對比評測
自擬任務:PID整定與負載測試
默認任務:對SDK5.0的建議和反饋
-
電機
+關注
關注
142文章
9023瀏覽量
145554 -
開發板
+關注
關注
25文章
5059瀏覽量
97541
原文標題:電機開發板評測大公布:PID整定與負載測試
文章出處:【微信號:STM32_STM8_MCU,微信公眾號:STM32單片機】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
NUCLEO-IHM07M1+F302R8+BR2804-1700KV修改了PWM頻率,之后就報over current的錯誤怎么解決?
請問電機套件P-NUCLEO-IHM002與P-NUCLEO-IHM001的區別是什么?
X-CUBE-SPN7-1.0.0 MDK編譯,電機抖動的原因?
轉:P-NUCLEO-IHM001 電機開發板串口調試指南
IHM07M1 FOC用時正交引腳沖突
IAR免費許可證是否適用于P-Nucleo-IHM001開發套件
Nucleo ihm001編譯和下載SPN7V1.0.0提供的示例時電機不規則地跳轉
P-NUCLEO-IHM001電機分析儀過流如何調整軟件和硬件范圍
P-NUCLEO-IHM001開發套件概述
如何用P-NUCLEO-IHM001對三相電流進行采樣呢?
UM1949在st.com上提供的p-nucleo-ihm001 MCU板的二進制固件在哪里?
[P-NUCLEO-IHM002]電機控制開發工具的介紹和使用的詳細資料概述
![[<b class='flag-5'>P-NUCLEO-IHM</b>002]<b class='flag-5'>電機</b>控制<b class='flag-5'>開發</b>工具的<b class='flag-5'>介紹</b>和使用的詳細資料概述](https://file.elecfans.com/web1/M00/53/23/pIYBAFsd8reAS1XQAAFFPft1kI8888.png)
ST官方電機開發套件P-NUCLEO-IHM002吐槽

UM1949_STM32電機控制Nucleo包P-NUCLEO-IHM001和P-NUCLEO-IHM002入門指南





 工商網監
工商網監
評論