") CAN總線在無人駕駛上的應用
CAN總線在無人駕駛上的應用
前言
本文主要內容是——無人駕駛中的CAN(Controller Area Network )總線。
CAN總線在整個無人駕駛系統(tǒng)中有著十分重要的作用。除了在VCU信號需要通過CAN總線進行傳輸外,無人車上的某些傳感器(如雷達、Mobileye)的信號傳遞也是通過CAN實現(xiàn)的。
我在無人駕駛,個人如何研究?中提到過實現(xiàn)一個無人駕駛系統(tǒng),會有幾個層級: 感知層 → 融合層 → 規(guī)劃層 → 控制層 更具體一點為: 傳感器層 → 驅動層 → 信息融合層 → 決策規(guī)劃層 → 底層控制層
“傳感器層”在之前的分享中已經(jīng)介紹過了,這次主要介紹的是“驅動層”相關的內容。
正文
CAN通信是一套高性能、高可靠性的通信機制,目前已廣泛應用在汽車電子領域。有關CAN的總線的原理及特性并不是本次分享的重點。本文的重點在無人駕駛系統(tǒng)獲取到CAN消息后,如何根據(jù)CAN協(xié)議,解析出想要的數(shù)據(jù)。從CAN總線中解析出傳感器的信息,可以說是每個自動駕駛工程師,甚至每一個汽車電子工程師必備的技能。
認識CAN消息
以百度推出的Apollo開源的代碼為例做CAN消息的講解,我們先看到每一幀的CAN消息是如何被定義的。
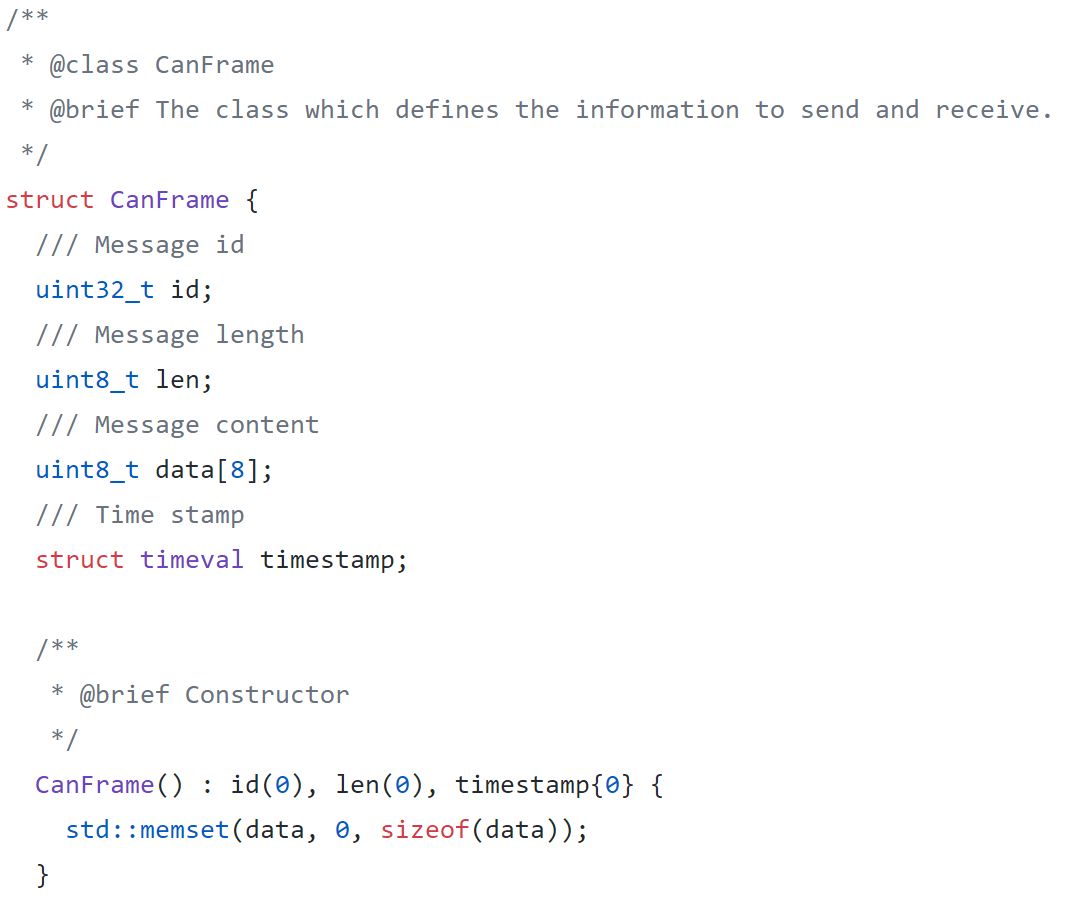
可以看到這個名為CanFrame的消息結構中包含4個關鍵信息,分別是:
1. uint32_tid
CAN消息的ID號。
由于CAN總線上傳播著大量CAN消息,因此兩個節(jié)點進行通信時,會先看id號,以確保這是節(jié)點想要的CAN消息。最初的CAN消息id號的范圍是000-7FF(16進制數(shù)),但隨著汽車電控信號的增多,需要傳遞的消息變多,信息不太夠用了。工程師在CAN消息基礎上,擴展了id號的范圍,大大增加了id號的上限,并將改進后的CAN消息稱為“擴展幀”,舊版CAN消息稱為“普通幀”。
如果拿寫信做比較,這個id就有點類似寫在信件封面上的名字。
2. uint8_tlen
CAN消息的有效長度。
每一幀CAN消息能夠傳遞最多8個無符號整形數(shù)據(jù),或者說能夠傳遞8*8的bool類型的數(shù)據(jù)。這里的len最大值為8,如果該幀CAN消息中有些位沒有數(shù)據(jù),這里的len就會小于8。
3. uint8_tdata[8]
CAN消息的實際數(shù)據(jù)。
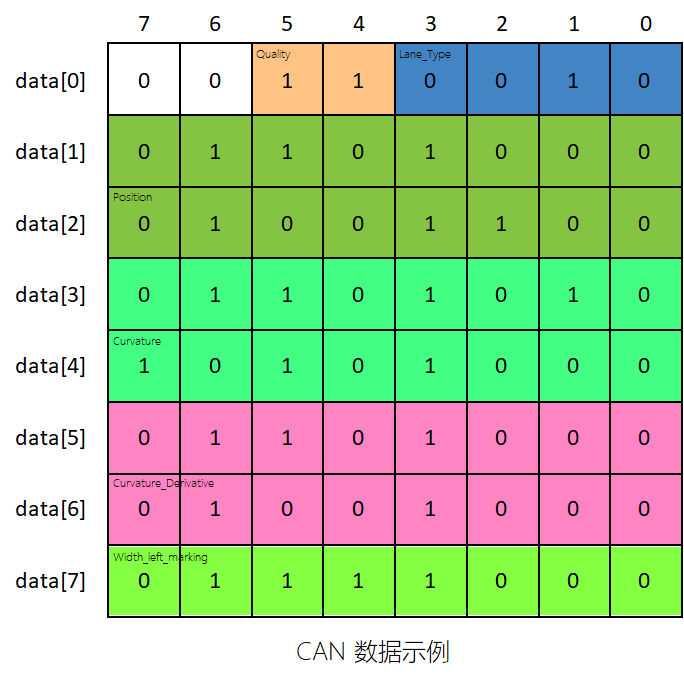
正如剛才提到的,每一幀CAN消息都包含至多8*8個bool類型的數(shù)據(jù),因此可以通過8*8個方格,可視化CAN消息中的data。如下圖所示:
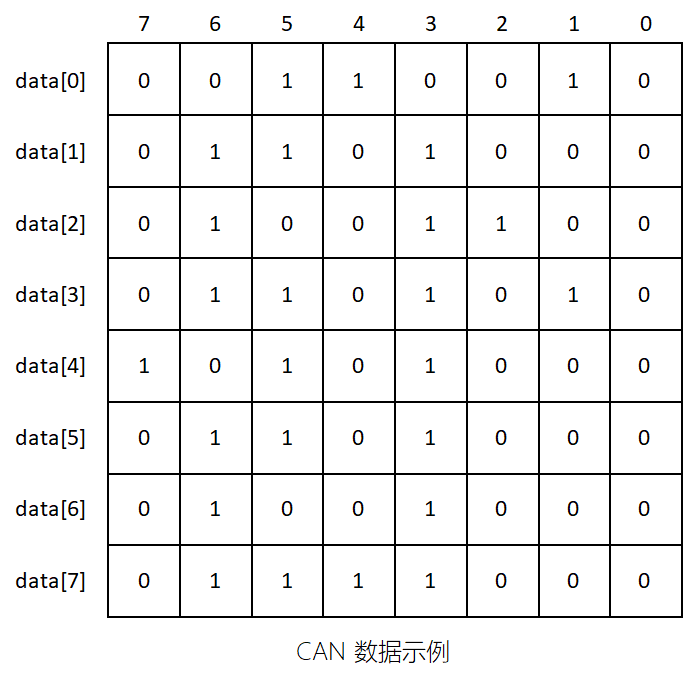
在沒有CAN協(xié)議幫助我們解析的情況下,這里的數(shù)據(jù)無異于亂碼,根本無法得到有用的消息,這也是CAN消息難以破解的原因之一。
4.timestamp
CAN消息的時間戳。
時間戳表示的是收到該CAN消息的時刻。通過連續(xù)多幀的時間戳,可以計算出CAN消息的發(fā)送周期,也可以用于判斷CAN消息是否被持續(xù)收到。
綜上,每幀CAN消息中最重要的部分其實是data,即8*8的bool值。所謂解析CAN消息,其實就是解析這8*8個bool類型的值。
認識CAN協(xié)議
目前業(yè)界的CAN協(xié)議,都是以后綴名為dbc的文件進行存儲的。德國Vector公司提供CANdb++ Editor是一款專門用于閱讀dbc文件的軟件。
如下圖所示,為Mobileye提供的車道線的dbc文件。(文末提供CANdb++ Editor安裝包和Mobileye車道線的dbc文件的獲取方法)
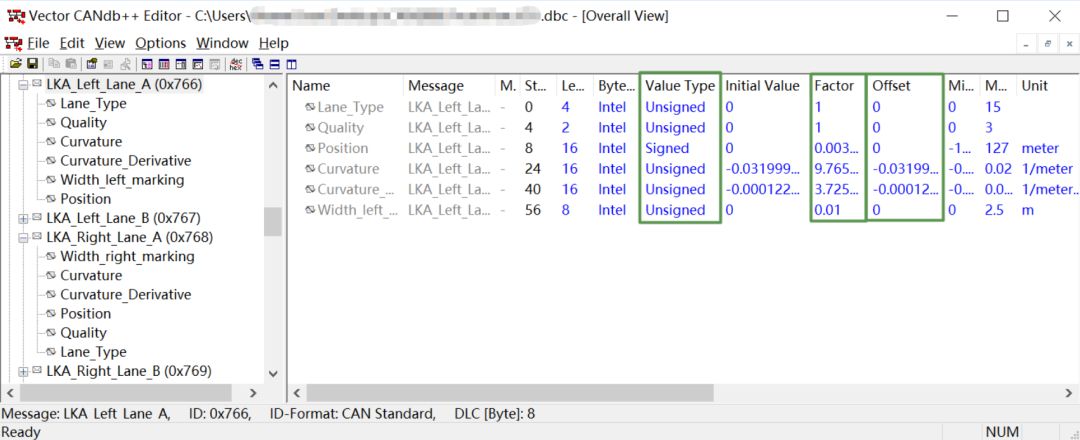
以id號為0x766的LKA_Left_Lane_A為例,這是Mobileye檢測無人車左側車道線的部分信息,包括了左側車道線的偏移量,曲率等。該幀CAN消息(Message)中的五個信號(Signal),分別是Lane_Type、Quality、Curvature、Curvature_Derivative、Width_left_marking、Position。
每個信號的具體描述顯示在軟件右側,其中與解析直接相關的三個要素已用綠色框選中。
1. Value Type(Unsigned或Signed)
某些物理量在描述時是有符號的,比如溫度。而描述另外一些量時,是沒有符號的,即均為正數(shù),比如說曲率。
2. Factor 和 Offset
這兩個參數(shù)需要參與實際的物理量運算,F(xiàn)actor是倍率,Offset是偏移量。例如Lane_Type和Quality信號的Factor為1,Offset為0,而其他信號的Factor均為小數(shù)。具體的計算方法請往下看。
雙擊LKA_Left_Lane_A,打開Layout頁,會發(fā)現(xiàn)很熟悉的方塊陣列,如下圖所示。
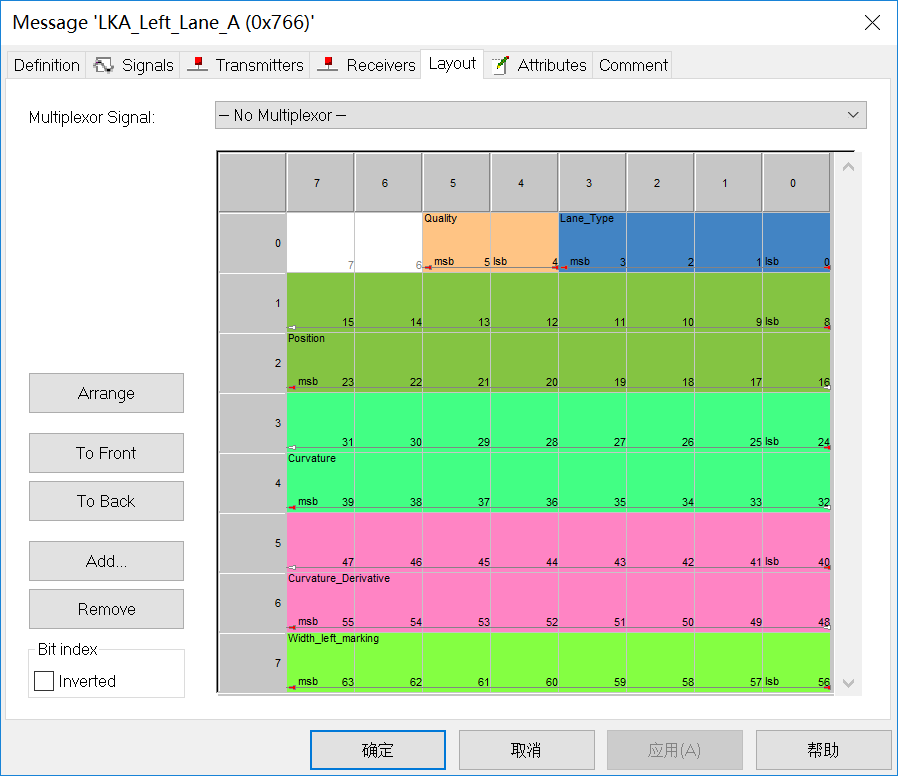
工程師真正關心的恰好是這塊彩色圖,因為該圖上的每個小方塊和data中的每一個bool量一一對應。這就是CAN協(xié)議的真面目。
解析CAN信號
由于彩色方塊圖與data是一一對應的,我們將兩個圖疊加,將得到如下圖所示的data圖。
每個信號物理量的計算公式為:

1.Factor為1的物理量
由于Lane_Type和Quality的Factor為1,Offset為0,因此十進制值為多少,實際物理量即為多少。
從圖中就能直接看出Quality這個信號占據(jù)兩個位,二進制數(shù)11,換算為十進制是3(1*2 + 1*1);Lane_Type占據(jù)四個位,二進制數(shù)為0010,換算為十進制是2(0*8 + 0*4 + 1*2 + 0*1)。
所以這一幀信號表示此時的左車道線Lane_Type值為2,Quality值為3。對于整數(shù)值,通信雙方可以約定規(guī)則,比如Mobileye就規(guī)定了,Quality為0或者1時表示車道線的置信度較低,不推薦使用此時的值;2表示置信度中等,3表示置信度較高,請放心使用。
2.Factor為小數(shù)的物理量
對于Factor不為1的物理量,比如Position,需要使用移位的方法進行解析,但解析公式保持不變。以百度 Apollo提供的源碼為例進行講解。
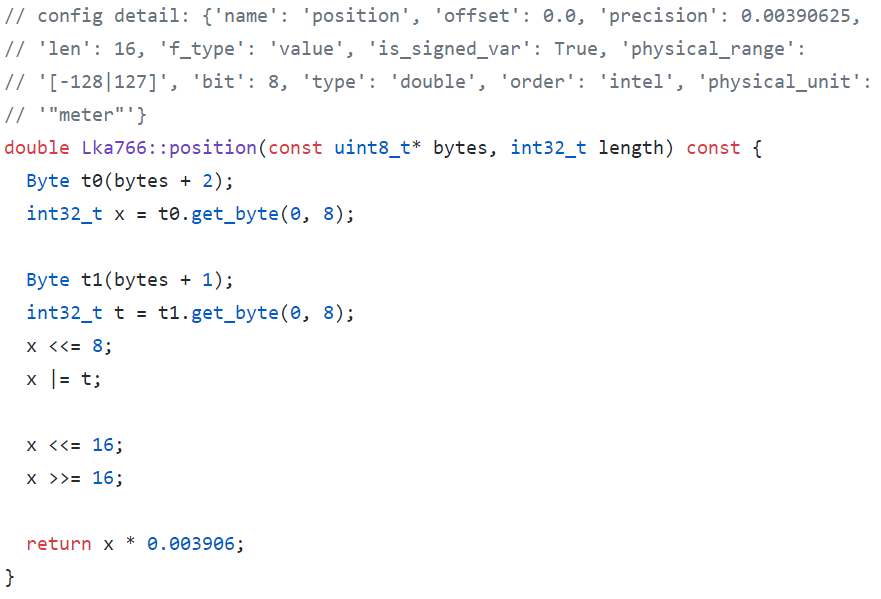
這里的bytes即為CAN消息中的data,首先將Position信號所在的行取出來,將第1行的8個bool值存儲在變量t1中,將第二行的8個bool值存儲在變量t0中。由于在這條CAN消息中,Position同時占據(jù)了高8位和低8位,因此需要將第一行和第二行的所有bool位拿來計算,高8位存儲在32位的變量x中,低8位存儲在32位的變量t中。
現(xiàn)在需要將高8位和低8位拼接,將高8位左移8位,然后與低8位求或運算,即可得到Position的二進制值。隨后進行的左移16位,再右移16位的操作是為了將32位的變量x的高16位全部初始化為0。之后將x乘以Factor再加上Offset即可得到真實的Position值,給真實值加上單位meter,即可獲取實際的物理量。
與CAN類似的通信協(xié)議
VCU、雷達等通過CAN總線傳遞信號,隨著CAN的負載越來越高,很多傳感器選擇了其他通信方式。比如激光雷達的點云數(shù)據(jù)量太過龐大,使用的是局域網(wǎng)的方式進行傳遞;再比如GPS和慣導使用的是串口進行通信。
雖然通信方式和通信協(xié)議千差萬別,但解析的方法都是一樣的。
結語
好了\(^o^)/~,這篇分享的內容基本上講清楚了CAN總線消息的解析過程。這是無人駕駛系統(tǒng)傳感器驅動層的基本理論。
由于不同ID的CAN消息的結構不一樣,因此在寫解析代碼時,需要十分仔細,否則會給后續(xù)處理帶來想不到的bug。
-
CAN總線
+關注
關注
145文章
1951瀏覽量
130782 -
無人駕駛
+關注
關注
98文章
4062瀏覽量
120539
原文標題:自動駕駛技術之——無人駕駛中的CAN總線
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論