") 仿人機(jī)器人關(guān)鍵技術(shù)研究
仿人機(jī)器人關(guān)鍵技術(shù)研究
2018 全球人工智能與機(jī)器人峰會(huì)(CCF-GAIR)在深圳召開,峰會(huì)由中國(guó)計(jì)算機(jī)學(xué)會(huì)(CCF)主辦,雷鋒網(wǎng)、香港中文大學(xué)(深圳)承辦,得到了寶安區(qū)政府的大力指導(dǎo),是國(guó)內(nèi)人工智能和機(jī)器人學(xué)術(shù)界、工業(yè)界及投資界三大領(lǐng)域的頂級(jí)交流盛會(huì),旨在打造國(guó)內(nèi)人工智能領(lǐng)域最具實(shí)力的跨界交流合作平臺(tái)。
CCF-GAIR 2018 延續(xù)前兩屆的“頂尖”陣容,提供1個(gè)主會(huì)場(chǎng)和11個(gè)專場(chǎng)(仿生機(jī)器人,機(jī)器人行業(yè)應(yīng)用,計(jì)算機(jī)視覺(jué),智能安全,金融科技,智能駕駛,NLP,AI+,AI芯片,IoT,投資人)的豐富平臺(tái),意欲給三界參會(huì)者從產(chǎn)學(xué)研多個(gè)維度,呈現(xiàn)出更富前瞻性與落地性相結(jié)合的會(huì)議內(nèi)容與現(xiàn)場(chǎng)體驗(yàn)。
在大會(huì)次日的仿生機(jī)器人專場(chǎng)論壇上,浙江大學(xué)智能系統(tǒng)與控制研究所機(jī)器人實(shí)驗(yàn)室主任熊蓉教授帶來(lái)了題為《仿人機(jī)器人關(guān)鍵技術(shù)研究》的主題演講。
她談到仿人機(jī)器人的三種優(yōu)勢(shì):
更容易在人機(jī)交互中被接受
更適合于人類生活環(huán)境
更適應(yīng)于使用人類工具
仿人機(jī)器人的研究最早可以追溯到上世紀(jì)中期,先是模擬人的手臂功能,到后來(lái)才開始對(duì)雙足機(jī)器人的研究。浙江大學(xué)于 2006 年開始仿人機(jī)器人研究,2011 年 10 月,他們對(duì)外發(fā)布一個(gè)能打乒乓球的仿人機(jī)器人,這個(gè)機(jī)器人通過(guò)外部視覺(jué)對(duì)球進(jìn)行識(shí)別和定位,進(jìn)行精確的軌跡跟蹤。今年年初,他們團(tuán)隊(duì)發(fā)布四足仿生機(jī)器人「絕影」,也引發(fā)極大關(guān)注。
目前,他們圍繞機(jī)器人的高精度控制做了一系列工作,如創(chuàng)新性的彈性仿生機(jī)構(gòu)、擬人運(yùn)動(dòng)規(guī)劃、動(dòng)態(tài)平衡控制,下一步,他們考慮將在輪式移動(dòng)機(jī)器人上做的一系列研究與腳足式機(jī)器人相結(jié)合,實(shí)現(xiàn)智能移動(dòng)。
以下為熊蓉教授的演講原文,雷鋒網(wǎng)做了不改變?cè)獾木庉嬚怼?/p>
非常高興有這樣一個(gè)機(jī)會(huì)來(lái)介紹我們近期在仿人機(jī)器人方面做的工作和取得的進(jìn)展。仿人機(jī)器人是對(duì)人類的形態(tài)和功能進(jìn)行模擬的機(jī)器,可能是各種機(jī)器人中最符合大眾想象的一種。
這種機(jī)器人的類人外型和功能具有多方面優(yōu)勢(shì):一是在人機(jī)交互中,它們的外型使得人類更加愿意接受,更愿意與其進(jìn)行對(duì)話交流;第二是模擬人的雙足行走能力,我們知道人的雙足可以非常靈活地適應(yīng)各種不同的地形,包括室內(nèi)的臺(tái)階和室外不平整的環(huán)境;第三是對(duì)人的手臂和手的模仿,通過(guò)類人的手臂和手,可以讓機(jī)器人更容易適應(yīng)人類為自己設(shè)計(jì)的工具。
日本福島核電站事件的時(shí)候,日本、美國(guó)、德國(guó)都曾派機(jī)器人過(guò)去,希望能關(guān)閉閥門,探測(cè)里面的情況。非常遺憾,當(dāng)時(shí)派進(jìn)去的都是履帶式機(jī)器人,雖然有一定的爬坡能力和不平整地面適應(yīng)能力,但是在任務(wù)執(zhí)行過(guò)程中還是失敗了。
所以,2012 年美國(guó) DAPRA 啟動(dòng)了 Robotics Challenge 比賽,要求機(jī)器人開著車到事故地點(diǎn),下車找到閥門進(jìn)行關(guān)閉。機(jī)器人需要能夠找到破障工具破墻,能夠越過(guò)廢墟地帶,并且可以上樓梯。要完成這樣一系列任務(wù),仿人外型是最能夠符合的,所以基本上所有參賽隊(duì)伍都采用了仿人型的機(jī)器人。成績(jī)最好的幾支隊(duì)伍還結(jié)合了混合式的運(yùn)動(dòng)模式,提高在平整地面上的運(yùn)行效率和作業(yè)時(shí)的穩(wěn)定性。因?yàn)榉氯藱C(jī)器人本質(zhì)上是不穩(wěn)定性系統(tǒng),容易摔倒,有很大的挑戰(zhàn)性。
機(jī)器人早期研究中,仿人的研究是分離的。最早是模擬人的手臂功能,形成了工業(yè)機(jī)器人這樣一系列的應(yīng)用系統(tǒng)。對(duì)人雙足進(jìn)行模擬的第一臺(tái)機(jī)器人于 1969 年問(wèn)世,由日本早稻田大學(xué)的加藤一郎研究,用液壓驅(qū)動(dòng),控制、供電都在體外,行走緩慢。
上世紀(jì) 90 年代,日本本田研發(fā)出阿西莫機(jī)器人,于 2000 年實(shí)現(xiàn)了 3 公里/時(shí)的行走速度。除了日本以外,德國(guó)、韓國(guó)、中國(guó)、美國(guó)都開展了仿人機(jī)器人研究,其中最著名的是阿西莫機(jī)器人,最快可以實(shí)現(xiàn) 9 公里/時(shí)的仿人行走。另外是阿特拉斯,能夠適應(yīng)室外不平整地面,而且可以做后空翻的擬人運(yùn)動(dòng)。
對(duì)仿人機(jī)器人的要求有靈活、快速、穩(wěn)定、高能效(即低能耗),并且逐步結(jié)合智能作業(yè)。圍繞著這些研究目標(biāo),相關(guān)的研究?jī)?nèi)容包括仿生機(jī)構(gòu)設(shè)計(jì)、關(guān)節(jié)驅(qū)動(dòng)設(shè)計(jì)、身體關(guān)節(jié)的協(xié)調(diào)運(yùn)動(dòng)規(guī)劃、對(duì)不平整地面外力擾動(dòng)下的控制,智能作業(yè)、智能移動(dòng)等。
浙江大學(xué)于 2006 年開始仿人機(jī)器人研究,2008 - 2011 年有幸承擔(dān)國(guó)家 863 重點(diǎn)課題。我們面向這樣一個(gè)本質(zhì)不穩(wěn)定系統(tǒng),需要能在線、快速、連續(xù)地跟動(dòng)態(tài)運(yùn)動(dòng)的乒乓球?qū)崿F(xiàn)交互。在這一作業(yè)里面,主要需要解決的是仿人機(jī)器人快速靈活的運(yùn)動(dòng),全身的協(xié)調(diào)運(yùn)動(dòng)規(guī)劃,以及在手臂加速度很大,對(duì)身體有很大的反作用力,雙足的支撐力很小的情況下,實(shí)現(xiàn)平衡控制。
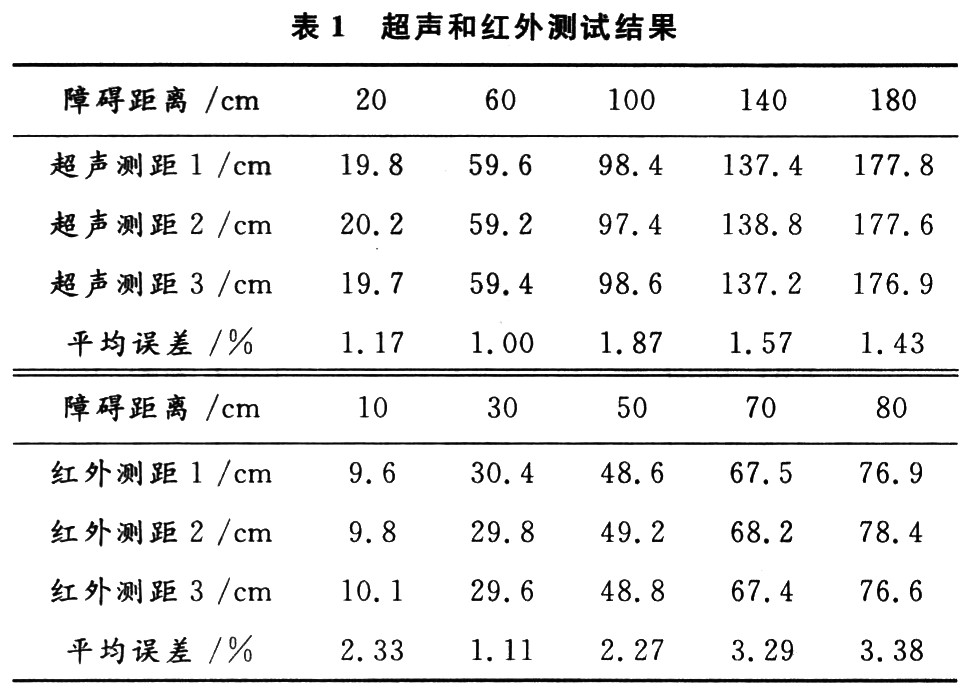
2011 年 10 月,我們對(duì)外發(fā)布了一個(gè)仿人機(jī)器人,這個(gè)機(jī)器人身高 1.65 米,重 56 公斤,共有 30 個(gè)自由度,通過(guò)外部視覺(jué)對(duì)球進(jìn)行識(shí)別和定位,進(jìn)行精確的軌跡跟蹤。視覺(jué)識(shí)別預(yù)測(cè)時(shí)間誤差在 4 毫秒內(nèi),距離誤差在 1 厘米內(nèi)。他的手臂速度比較快,可以正反拍交替,也能適應(yīng)不同的球速(從 3 米/秒到 12 米/秒)。
我們發(fā)布以后得到廣泛關(guān)注,第一位來(lái)我們實(shí)驗(yàn)室跟它對(duì)打的老先生來(lái)自山東威海,他一開始不是很相信,跟這個(gè)機(jī)器人對(duì)打了一個(gè)多小時(shí)。
我們也做了雙機(jī)器人的對(duì)打,比起與人對(duì)打,雙機(jī)器人對(duì)打比較簡(jiǎn)單,人可能會(huì)忽前忽后、忽快忽慢,機(jī)器人打球的時(shí)候是無(wú)法移動(dòng)的。
我們也參加了一些國(guó)家的展會(huì),美聯(lián)社、路透社、美國(guó)地理頻道等都為我們做過(guò)專題報(bào)道。我們當(dāng)時(shí)完成的技術(shù),包括對(duì)運(yùn)動(dòng)目標(biāo)的識(shí)別、預(yù)測(cè),以及機(jī)器人在運(yùn)動(dòng)過(guò)程中如何確定跟球、桌之間的關(guān)系,實(shí)時(shí)自定位。還有如何做到質(zhì)量輕、剛性強(qiáng)、速度快,如何提高機(jī)器人的控制響應(yīng)能力,多關(guān)節(jié)的運(yùn)動(dòng)規(guī)劃能力和穩(wěn)定平衡控制。
仿人機(jī)器人是很好的技術(shù)平臺(tái),里面的視覺(jué)識(shí)別、手臂規(guī)劃和自平衡技術(shù)都可以推廣到不同的系統(tǒng)里。
當(dāng)然,這里還存在很多問(wèn)題和遺憾。第一,腿足運(yùn)動(dòng)方面,我們的速度還是比較低,跟國(guó)際頂尖水平相比有較大差距;穩(wěn)定性和適應(yīng)性也比較差,如果地面不平整或者行走過(guò)程中有人推一下,機(jī)器人會(huì)很容易摔倒。第二,有很多人問(wèn)我們機(jī)器人能不能打旋轉(zhuǎn)乒乓球,目前可以做到低速旋轉(zhuǎn),但如果是高速旋轉(zhuǎn),預(yù)測(cè)誤差會(huì)很大。第三,機(jī)器人基本上是在固定球桌的環(huán)境里,還沒(méi)有實(shí)現(xiàn)復(fù)雜環(huán)境的智能移動(dòng)。2012 年開始,我們主要圍繞前面兩個(gè)問(wèn)題在進(jìn)行研究,現(xiàn)在在開展第三方面的工作。
在腿足運(yùn)動(dòng)方面,我們主要提升的是對(duì)未知地面和外力擾動(dòng)的自主適應(yīng)能力,另外希望機(jī)器人從行走變成跑跳,提高行走速度。
之前系統(tǒng)適應(yīng)性差的核心原因在于我們采用了高精度位置控制方法,這要求我們的機(jī)械結(jié)構(gòu)必須具有足夠的剛性,運(yùn)動(dòng)模型要足夠精確。這種剛性結(jié)構(gòu)使得地面反作用力直接傳到機(jī)器人身體上面,從而導(dǎo)致它非常容易不穩(wěn)定。我們也知道這樣一個(gè)復(fù)雜的系統(tǒng)很難精確的建模。由于對(duì) ZMP 模型的依賴,我們發(fā)現(xiàn)它要求支撐域很大,而且它的控制比較難以融合。
我們看一下人是怎么做的。動(dòng)物運(yùn)動(dòng)的基礎(chǔ)是由力控制的,人的行走并不是剛性作業(yè),很多柔性的肌腱、韌帶、脊椎,都對(duì)我們的行走起到非常大的作用。
因此,在這樣的分析之下,我們 2012 年開始把高精度位置控制的思想完全摒棄掉,用柔性力矩控制做新一代的仿人機(jī)器人,開始彈性仿生機(jī)構(gòu)研究,模擬人的力控運(yùn)動(dòng)規(guī)劃以及運(yùn)動(dòng)動(dòng)態(tài)平衡控制,提升穩(wěn)定性,實(shí)現(xiàn)跑跳運(yùn)動(dòng),有效降低能耗。
我們?cè)谶@里用了 SEA 關(guān)節(jié),這是 1991 年由 Pratt 提出的。
我們主要設(shè)計(jì)了新的平面扭簧,根據(jù)關(guān)節(jié)的彈性需求進(jìn)行靈活的調(diào)整,并可以嵌入到關(guān)節(jié)中。在關(guān)節(jié)設(shè)計(jì)基礎(chǔ)上,我們做了力位混合控制,在力矩控制基礎(chǔ)上結(jié)合神經(jīng)網(wǎng)絡(luò)和卡爾曼濾波的方法進(jìn)行位置和速度控制,特別是提高負(fù)載和相位變化自適應(yīng)。
我們模仿人的腿設(shè)計(jì)單腿機(jī)器人,在小腿和大腿上,除了關(guān)節(jié)里面有彈性單元,還增加了彈簧,模擬人的肌腱,減少地面的沖擊,降低對(duì)關(guān)節(jié)做工的要求。
我們首先實(shí)現(xiàn)了單腿的跳躍,這里借鑒了人的運(yùn)動(dòng)方式。對(duì)于人的運(yùn)動(dòng),我們用運(yùn)動(dòng)捕捉儀進(jìn)行數(shù)據(jù)獲取和分析。我們發(fā)現(xiàn)人在運(yùn)動(dòng)的時(shí)候,各個(gè)關(guān)節(jié)的協(xié)調(diào)性有一定規(guī)律。在跳的時(shí)候,落地壓縮和落地伸展過(guò)程中,膝關(guān)節(jié)和踝關(guān)節(jié)的角速度是相反的。我們模擬人的特性,以能量最優(yōu)做各關(guān)節(jié)彈性最優(yōu)的匹配,能夠降低能耗。在軌跡規(guī)劃的時(shí)候,我們也兼顧到能耗和姿態(tài)平衡。原來(lái)的軌跡比較機(jī)械,優(yōu)化之后自然地形成了擬人的收腿動(dòng)作。
下面是 2014 年實(shí)現(xiàn)的單腿跳躍機(jī)器人,跳躍高度達(dá) 35 厘米,超過(guò)了當(dāng)時(shí)做的最好的 ETH,人是 0.2,我們單腿做到 0.29。
在單腿基礎(chǔ)上我們研究了雙足的運(yùn)動(dòng)。我們也是用虛擬模型進(jìn)行身體軀干的控制,因?yàn)槿嗽谛凶哌^(guò)程中往往是對(duì)自己的軀干進(jìn)行控制,根據(jù)軀干的控制來(lái)生成腿的運(yùn)動(dòng)。這也是國(guó)際上常用的一種方法,我們進(jìn)一步把人的運(yùn)動(dòng)特性,速度和步長(zhǎng)之間的關(guān)系融合進(jìn)去,從而適應(yīng)不平整地面和外力擾動(dòng)。
我們根據(jù)力的規(guī)則,采用地面沖量模型,通過(guò)仿真獲得沖量輪廓,再延伸到實(shí)物機(jī)器人上,用機(jī)器人學(xué)習(xí)的方法來(lái)調(diào)整沖量輪廓,在運(yùn)動(dòng)的時(shí)候?qū)_量輪廓進(jìn)行跟蹤。
在動(dòng)態(tài)平衡控制上,我們一個(gè)主要工作是動(dòng)力學(xué)模型參數(shù)在線辨識(shí)。
因?yàn)闄C(jī)器人在運(yùn)動(dòng)過(guò)程中特性總是在發(fā)生改變,這些小的改變可能對(duì)控制造成很大影響,作業(yè)時(shí)也可能產(chǎn)生質(zhì)量變化。基于此,我們做了動(dòng)力學(xué)模型參數(shù)在線辨識(shí),適應(yīng)質(zhì)量的變化和外力的擾動(dòng)。
在多模型融合的柔性平衡控制上,我們采用 CP 點(diǎn)+飛輪模型+虛擬力控制的方法,當(dāng)存在外力擾動(dòng)的時(shí)候,通過(guò)踝關(guān)節(jié)和身體關(guān)節(jié)實(shí)現(xiàn)平衡,在運(yùn)動(dòng)的過(guò)程中可以通過(guò)跨步策略實(shí)現(xiàn)平衡。
最后,在跑跳過(guò)程中如何去實(shí)現(xiàn)平衡控制,這個(gè)方法比較復(fù)雜,這里就不展開了。
我們目前實(shí)現(xiàn)的雙足仿人機(jī)器人與前一代相比速度更快,達(dá)到 3.6 公里/時(shí),在行走中融合了跑跳的模式,可以實(shí)現(xiàn)室內(nèi)外行走,機(jī)器人現(xiàn)在是全盲行走,由于落腳點(diǎn)的調(diào)整,方向會(huì)走歪,我們有柔性控制的方法,當(dāng)它走偏了,人拉一拉它,又會(huì)走回正道上。
在這個(gè)過(guò)程中我們也與企業(yè)有著合作,研發(fā)出四足機(jī)器人,并在今年春節(jié)之前為慶賀狗年進(jìn)行了發(fā)布。這里有很多基礎(chǔ)的方法和原理是類似的,不過(guò)在具體的實(shí)現(xiàn)設(shè)計(jì)上不同。這個(gè)機(jī)器人可以達(dá)到 6 公里/小時(shí)的行走速度,能夠適應(yīng)不平整的地面以及雪地、冰地。在人揣它的時(shí)候,它也不會(huì)倒,當(dāng)然,揣得太大力還是會(huì)倒。SpotMini 也有做這方面的研究,從運(yùn)動(dòng)的靈活性來(lái)講,SpotMini 做得非常好。
我們?cè)诟咚傩D(zhuǎn)乒乓球上做了準(zhǔn)確預(yù)測(cè)和運(yùn)動(dòng)決策方面的工作。航空航天的太空垃圾很難捕捉,因?yàn)檫@是翻滾的目標(biāo),模型非常復(fù)雜,有很多的量我們沒(méi)有辦法預(yù)先得到,也很難觀測(cè)。我們以旋轉(zhuǎn)飛行乒乓球作為類似的對(duì)象來(lái)開展這方面的研究。我們對(duì)球上的自然標(biāo)記進(jìn)行識(shí)別、定位、跟蹤,把數(shù)據(jù)擬合起來(lái),計(jì)算它的旋轉(zhuǎn)方向和旋轉(zhuǎn)速度,在國(guó)際上首次實(shí)現(xiàn)了對(duì)高速旋轉(zhuǎn)乒乓球的準(zhǔn)確預(yù)測(cè)和接打。
在這個(gè)基礎(chǔ)上,我們進(jìn)一步研究了不看球上的標(biāo)記,只是看它的空間飛行位置來(lái)預(yù)測(cè)旋轉(zhuǎn)飛行軌跡。這依賴于我們對(duì)飛行模型和碰撞模型的準(zhǔn)確建模。我們改變了原來(lái)離散的模型,推導(dǎo)得到了連續(xù)的模型,再利用機(jī)器學(xué)習(xí)的方法得到模型的系數(shù),對(duì) 700 多個(gè)球預(yù)測(cè)的精度(5 厘米內(nèi))達(dá)到 95.55%。
現(xiàn)在我們基于強(qiáng)化學(xué)習(xí)進(jìn)行回球決策。
下一步,除了這些方面的工作,我們也在考慮把原來(lái)輪式移動(dòng)機(jī)器人上做的一系列技術(shù)(環(huán)境感知、大范圍環(huán)境地圖構(gòu)建、對(duì)地圖中各種障礙物的識(shí)別、機(jī)器人導(dǎo)航、定位)跟腿足式機(jī)器人結(jié)合起來(lái),實(shí)現(xiàn)在環(huán)境中的智能移動(dòng)。
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28445瀏覽量
207198 -
仿人機(jī)器人
+關(guān)注
關(guān)注
0文章
17瀏覽量
9703
原文標(biāo)題:浙江大學(xué)熊蓉教授:仿人機(jī)器人研究的三大關(guān)鍵技術(shù) | CCF-GAIR 2018
文章出處:【微信號(hào):tjrobot,微信公眾號(hào):天津機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
智能機(jī)器人的三大關(guān)鍵技術(shù)詳解
工業(yè)機(jī)器人的技術(shù)原理
基于ARM9的DF-1機(jī)器人傳感器系統(tǒng)設(shè)計(jì)
采用ARM9實(shí)現(xiàn)嵌入式仿人機(jī)器人傳感器系統(tǒng)設(shè)計(jì)
基于CAN總線和雙傳感器仿人機(jī)器人運(yùn)動(dòng)控制系統(tǒng)的研究
讓機(jī)器人實(shí)現(xiàn)智能的關(guān)鍵技術(shù)到底是什么?
基于ARM9的嵌入式仿人機(jī)器人傳感器系統(tǒng)設(shè)計(jì)
完全自主型仿人機(jī)器人成為首個(gè)參加RoboCup的仿人機(jī)器人
混頻器設(shè)計(jì)中的關(guān)鍵技術(shù)研究
工業(yè)機(jī)器人的關(guān)鍵技術(shù)及應(yīng)用趨勢(shì)
Cobot機(jī)器人的關(guān)鍵技術(shù)解析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論