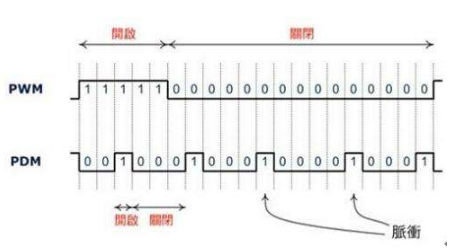
 如何用定時器來捕獲PWM脈沖頻率
如何用定時器來捕獲PWM脈沖頻率
一、概念理解
PWM輸入捕獲模式是輸入捕獲模式的特例,自己理解如下:
1. 每個定時器有四個輸入捕獲通道IC1、IC2、IC3、IC4。且IC1 IC2一組,IC3 IC4一組。并且可是設置管腳和寄存器的對應關系。
3. 這兩個ICx信號分別在相反的極性邊沿有效。
4. 兩個邊沿信號中的一個被選為觸發信號,并且從模式控制器被設置成復位模式。
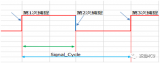
5. 當觸發信號來臨時,被設置成觸發輸入信號的捕獲寄存器,捕獲“一個PWM周期(即連續的兩個上升沿或下降沿)”,它等于包含TIM時鐘周期的個數(即捕獲寄存器中捕獲的為TIM的計數個數n)。
6. 同樣另一個捕獲通道捕獲觸發信號和下一個相反極性的邊沿信號的計數個數m,即(即高電平的周期或低電平的周期)
7. 由此可以計算出PWM的時鐘周期和占空比了
frequency=f(TIM時鐘頻率)/n。
duty cycle=(高電平計數個數/n),
若m為高電平計數個數,則duty cycle=m/n
若m為低電平計數個數,則duty cycle=(n-m)/n
注:因為計數器為16位,所以一個周期最多計數65535個,所以測得的 最小頻率= TIM時鐘頻率/65535。
二、程序設計與分析
1. 程序概述:選擇TIM3作為PWM輸入捕獲。IC2設置為上升沿,并設置為有效的觸發輸入信號。所以IC2的捕獲寄存器捕獲PWM周期,IC1的捕獲寄存器捕獲PWM的高電平周期。
2.程序代碼如下:
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);//時鐘配置
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;//GPIO配置PIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;//NVIC配置NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;//通道選擇TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;//上升沿觸發TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;//管腳與寄存器對應關系TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;//輸入預分頻。意思是控制在多少個輸入周期做一次捕獲,如果
//輸入的信號頻率沒有變,測得的周期也不會變。比如選擇4分頻,則每四個輸入周期才做一次捕獲,這樣在輸入信號變化不頻繁的情況下,
//可以減少軟件被不斷中斷的次數。TIM_ICInitStructure.TIM_ICFilter = 0x0;//濾波設置,經歷幾個周期跳變認定波形穩定0x0~0xF
TIM_PWMIConfig(TIM3, &TIM_ICInitStructure);//根據參數配置TIM外設信息
TIM_SelectInputTrigger(TIM3, TIM_TS_TI2FP2);//選擇IC2為始終觸發源
TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset);//TIM從模式:觸發信號的上升沿重新初始化計數器和觸發寄存器的更新事件
TIM_SelectMasterSlaveMode(TIM3, TIM_MasterSlaveMode_Enable); //啟動定時器的被動觸發
TIM_Cmd(TIM3, ENABLE);//啟動TIM2
TIM_ITConfig(TIM3, TIM_IT_CC2, ENABLE);//打開中斷
中斷處理函數
void TIM3_IRQHandler(void){TIM_ClearITPendingBit(TIM3, TIM_IT_CC2);//清楚TIM的中斷待處理位
IC2Value = TIM_GetCapture2(TIM3);//讀取IC2捕獲寄存器的值,即為PWM周期的計數值
if (IC2Value != 0){ DutyCycle = (TIM_GetCapture1(TIM3) * 100) / IC2Value;//讀取IC1捕獲寄存器的值,并計算占空比
Frequency = 72000000 / IC2Value;//計算PWM頻率。}else{DutyCycle = 0;Frequency = 0;}}
注(一):若想改變測量的PWM頻率范圍,可將TIM時鐘頻率做分頻處理
TIM_TimeBaseStructure.TIM_Period = 0xFFFF;//周期0~FFFFTIM_TimeBaseStructure.TIM_Prescaler = 5;//時鐘分頻,分頻數為5+1即6分頻TIM_TimeBaseStructure.TIM_ClockDivision = 0;//時鐘分割TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//模式TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);//基本初始化注注(二):定時器TIM的倍頻器X1或X2。在APB分頻為1時,倍頻值為1,否則為2。
筆記:之前調試的時候,想檢測低頻,按照上面方法進行分頻處理時,怎么都不行,后來才搞明白,由于檢測時要進行計數,印記預裝載值TIM_Period還是要設置成0xffff,而TIM_Prescaler是進行分頻用的,也就是說,如果定時器時鐘為72M,則將TIM_Prescaler設置成5后,TIM的時鐘為14.4M,此時可以檢測的最小頻率=14.4M/0xffff,也就是說最小檢測頻率=14.4M/TIM_Period。
-
PWM
+關注
關注
114文章
5193瀏覽量
214222 -
定時器
+關注
關注
23文章
3251瀏覽量
115009
原文標題:STM32小白必看!一招教你定時器捕獲PWM脈沖頻率
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
STM32定時器的輸入捕獲模式測量脈沖寬度或者測量頻率
stm32定時器輸入捕獲
基于STM32定時器捕獲測量脈寬的應用示例
STM32單片機一個定時器輸出不同頻率PWM波

STM32F4單定時器獨立輸出四路PWM脈沖
STM32CubeMX——定時器輸入捕獲
一個通道如何捕獲PWM的頻率和占空比?






 工商網監
工商網監
評論