") 小白入門,對(duì)于工業(yè)機(jī)器人該如何精準(zhǔn)選型?
小白入門,對(duì)于工業(yè)機(jī)器人該如何精準(zhǔn)選型?
對(duì)于自動(dòng)化行業(yè)的老鳥(niǎo),資深的機(jī)、電工程師來(lái)說(shuō),選擇合適的“機(jī)器人”也許是一個(gè)簡(jiǎn)單的工作。但是對(duì)于那些第一次準(zhǔn)備購(gòu)買、導(dǎo)入機(jī)器人的設(shè)計(jì)人員或工廠來(lái)說(shuō),也許會(huì)有些迷茫。下面從9個(gè)專業(yè)的參數(shù)方面,討論如何選擇一個(gè)合適的工業(yè)機(jī)器人。
首先,最重要的源頭是評(píng)估導(dǎo)入的機(jī)器人,是用于怎樣的應(yīng)用場(chǎng)合以及什么樣的制程。
若是應(yīng)用制程需要在人工旁邊由機(jī)器協(xié)同完成,對(duì)于通常的人機(jī)混合的半自動(dòng)線,特別是需要經(jīng)常變換工位或移位移線的情況,以及配合新型力矩感應(yīng)器的場(chǎng)合,協(xié)作型機(jī)器人(Cobots)應(yīng)該是一個(gè)很好的選項(xiàng)。
如果是尋找一個(gè)緊湊型的取放(Pick& Place)料機(jī)器人,你可能想選擇一個(gè)水平關(guān)節(jié)型機(jī)器人(Scara)。
如果是尋找針對(duì)小型物件,快速取放的場(chǎng)合,并聯(lián)機(jī)器人(Delta)最適合這樣的需求。
接下來(lái)的討論,我們將針對(duì)垂直關(guān)節(jié)多軸機(jī)器人(Multi-axis)。這種機(jī)器人可以適應(yīng)一個(gè)非常大范圍的應(yīng)用。從取、放料到碼垛,以及噴涂,去毛刺,焊接等專用制程。現(xiàn)在,工業(yè)機(jī)器人制造商基本上針對(duì)每一種應(yīng)用制程都有相應(yīng)的機(jī)器人方案。你所做的只需要明確你希望機(jī)器人為你做哪個(gè)工作,以及從不同的種類當(dāng)中,選擇最適合的型號(hào)。
有效負(fù)載是,機(jī)器人在其工作空間可以攜帶的最大負(fù)荷。從例如3Kg到1300Kg不等。
如果你希望機(jī)器人完成將目標(biāo)工件從一個(gè)工位搬運(yùn)到另一個(gè)工位,需要注意將工件的重量以及機(jī)器人手爪的重量加總到其工作負(fù)荷。
另外特別需要注意的是機(jī)器人的負(fù)載曲線,在空間范圍的不同距離位置,實(shí)際負(fù)載能力會(huì)有差異。
機(jī)器人配置的軸數(shù)直接關(guān)聯(lián)其自由度。如果是針對(duì)一個(gè)簡(jiǎn)單的直來(lái)直去的場(chǎng)合,比如從一條皮帶線取放到另一條,簡(jiǎn)單的4軸機(jī)器人就足以應(yīng)對(duì)。
但是,如果應(yīng)用場(chǎng)景在一個(gè)狹小的工作空間,且機(jī)器人手臂需要很多的扭曲和轉(zhuǎn)動(dòng),6軸或7軸機(jī)器人將是最好的選擇。
軸數(shù)一般取決于該應(yīng)用場(chǎng)合。應(yīng)當(dāng)注意,在成本允許的前提下,選型多一點(diǎn)的軸數(shù)在靈活性方面不是問(wèn)題。這樣方便后續(xù)重復(fù)利用改造機(jī)器人到另一個(gè)應(yīng)用制程,能適應(yīng)更多的工作任務(wù),而不是發(fā)現(xiàn)軸數(shù)不夠。
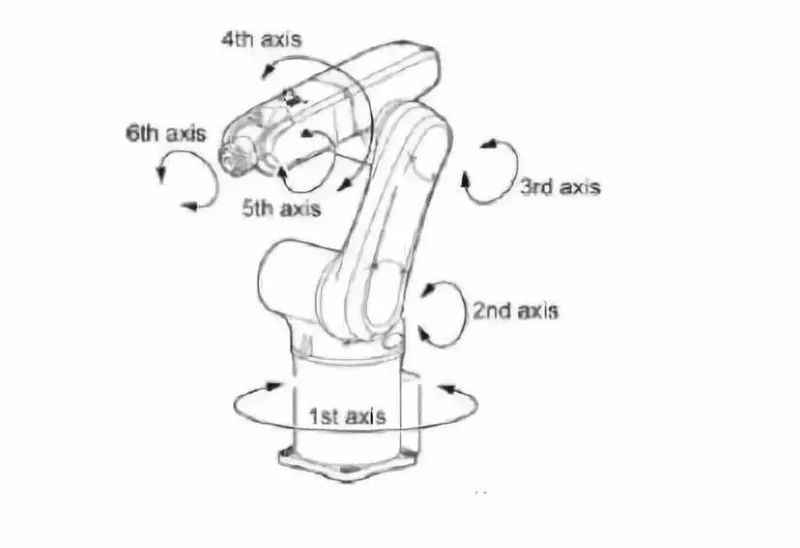
機(jī)器人制造商傾向于使用各自略有不同的軸或關(guān)節(jié)命名。基本上,第一關(guān)節(jié)(J1)是最接近機(jī)器人底座的那個(gè)。接下來(lái)的關(guān)節(jié)稱為J2,J3,J4等直到到達(dá)手腕末端。而其他的Yaskawa/Motoman公司則使用字母命名他們機(jī)器人的軸。
當(dāng)評(píng)估目標(biāo)應(yīng)用場(chǎng)合的時(shí)候,應(yīng)該了解機(jī)器人需要到達(dá)的最大距離。選擇一個(gè)機(jī)器人不是僅僅憑它的有效載荷-也需要綜合考量它到達(dá)的確切距離。每個(gè)公司都會(huì)給出相應(yīng)機(jī)器人的作動(dòng)范圍圖,由此可以判斷,該機(jī)器人是否適合于特定的應(yīng)用。
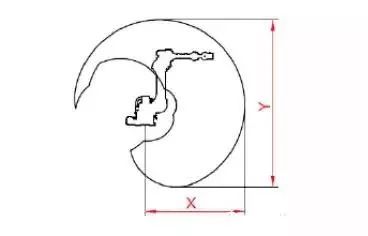
機(jī)器人的水平運(yùn)動(dòng)范圍,注意機(jī)器人在近身及后方的一片非工作區(qū)域。
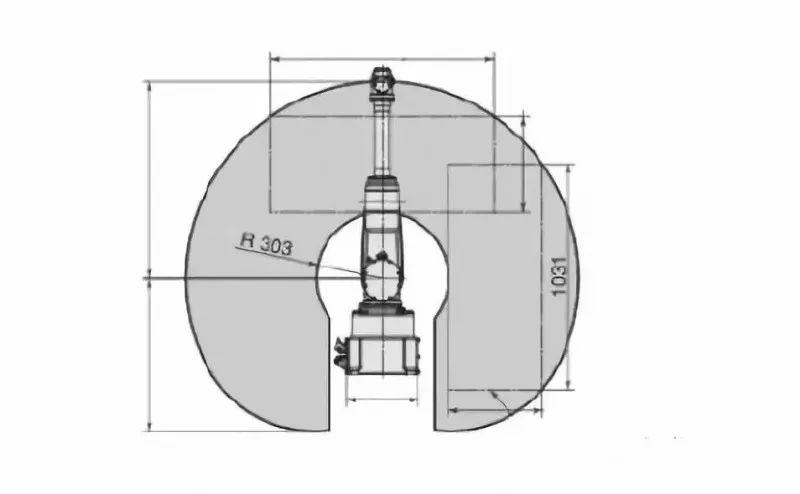
機(jī)器人的最大垂直高度的量測(cè)是從機(jī)器人能到達(dá)的最低點(diǎn)(常在機(jī)器人底座以下)到手腕可以達(dá)到的的最大高度的距離(Y)。最大水平作動(dòng)距離是從機(jī)器人底座中心到手腕可以水平達(dá)到的最遠(yuǎn)點(diǎn)的中心的距離(X)。
同樣的,這個(gè)因素也還是取決于你的應(yīng)用場(chǎng)合。重復(fù)精度可以被描述為機(jī)器人完成例行的工作任務(wù)每一次到達(dá)同一位置的能力。
一般在±0.05mm到±0.02mm之間,甚至更精密。例如,如果需要你的機(jī)器人組裝一個(gè)電子線路板,你可能需要一個(gè)超級(jí)精密重復(fù)精度的機(jī)器人。如果應(yīng)用工序是比較粗糙,比如打包,碼垛等,工業(yè)機(jī)器人也就不需要那么精密。
另外一方面,組裝工程的機(jī)器人精度的選型要求,也關(guān)聯(lián)組裝工程各環(huán)節(jié)尺寸和公差的傳遞和計(jì)算,比如:來(lái)料物料的定位精度,工件本身的在治具中的重復(fù)定位精度等。這項(xiàng)指標(biāo)從2D方面以正負(fù)'±'表示。事實(shí)上,由于機(jī)器人的運(yùn)動(dòng)重復(fù)點(diǎn)不是線性的而是在空間3D運(yùn)動(dòng),該參數(shù)的實(shí)際情況可以是在公差半徑內(nèi)的球形空間內(nèi)任何位置。
當(dāng)然,現(xiàn)在的配合現(xiàn)在的機(jī)器視覺(jué)技術(shù)的運(yùn)動(dòng)補(bǔ)償,將減低機(jī)器人對(duì)于來(lái)料精度的要求和依賴,提升整體的組裝精度。
這個(gè)參數(shù)與每一個(gè)用戶息息相關(guān)。事實(shí)上,它取決于在該作業(yè)需要完成的Cycle Time。規(guī)格表列明了該型號(hào)機(jī)器人最大速度,但我們應(yīng)該知道,考量從一個(gè)點(diǎn)到另一個(gè)點(diǎn)的加減速,實(shí)際運(yùn)行的速度將在0和最大速度之間。這項(xiàng)參數(shù)單位通常以度/秒計(jì)。有的機(jī)器人制造商也會(huì)標(biāo)注機(jī)器人的最大加速度。
機(jī)器人本體重量是設(shè)計(jì)機(jī)器人單元時(shí)的一個(gè)重要因素。如果工業(yè)機(jī)器人必須安裝在一個(gè)定制的機(jī)臺(tái),甚至在導(dǎo)軌上,你可能需要知道它的重量來(lái)設(shè)計(jì)相應(yīng)的支撐。
基本上每個(gè)機(jī)器人制造商提供他們的機(jī)器人制動(dòng)系統(tǒng)的信息。有些機(jī)器人對(duì)所有的軸配備剎車,其他的機(jī)器人型號(hào)不是所有的軸都配置剎車。要在工作區(qū)中確保精確和可重復(fù)的位置,需要有足夠數(shù)量的剎車。另外一種特別情況,意外斷電發(fā)生的時(shí)候,不帶剎車的負(fù)重機(jī)器人軸不會(huì)鎖死,有造成意外的風(fēng)險(xiǎn)。
同時(shí),某些機(jī)器人制造商也提供機(jī)器人的轉(zhuǎn)動(dòng)慣量。其實(shí),對(duì)于設(shè)計(jì)的安全性來(lái)說(shuō),這將是一個(gè)額外的保障。你可能還注意到不同軸上的適用的扭矩。例如,如果你的動(dòng)作需要一定量的扭矩以正確完成工作,你需要檢查,在該軸上適用的最大扭矩是否正確的。如果選型不正確,機(jī)器人則可能由于過(guò)載而Down機(jī)。
根據(jù)機(jī)器人的使用環(huán)境,選擇達(dá)到一定的防護(hù)等級(jí)(IP等級(jí))的標(biāo)準(zhǔn)。一些制造商提供相同的機(jī)械手針對(duì)不同的場(chǎng)合不同的IP防護(hù)等級(jí)的產(chǎn)品系列。
如果機(jī)器人在與生產(chǎn)食品相關(guān)的產(chǎn)品,醫(yī)藥、醫(yī)療器具,或易燃易爆的環(huán)境中工作時(shí),IP等級(jí)會(huì)有所不同。一般如,標(biāo)準(zhǔn):IP40,油霧:IP67,清潔ISO等級(jí):3。
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28632瀏覽量
208349 -
工業(yè)機(jī)器人
+關(guān)注
關(guān)注
91文章
3374瀏覽量
92864
原文標(biāo)題:從小白到精通,工業(yè)機(jī)器人如何精準(zhǔn)選型?
文章出處:【微信號(hào):im_robotic,微信公眾號(hào):機(jī)器人在線訂閱號(hào)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
安川工業(yè)機(jī)器人結(jié)構(gòu)

工業(yè)機(jī)器人常用的編程方式
國(guó)產(chǎn)工業(yè)機(jī)器人與進(jìn)口機(jī)器人區(qū)別有哪些
工業(yè)機(jī)器人AMR的最強(qiáng)大腦,你了解多少?

工業(yè)機(jī)器人仿真軟件有哪些
abb工業(yè)機(jī)器人的編程語(yǔ)言是什么
簡(jiǎn)述工業(yè)機(jī)器人控制系統(tǒng)的特點(diǎn)
工業(yè)機(jī)器人的機(jī)械部分主要包括什么
工業(yè)機(jī)器人控制柜的組成有哪些
基于飛凌嵌入式RK3568J核心板的工業(yè)機(jī)器人控制器應(yīng)用方案
其利天下技術(shù)·搭載無(wú)刷電機(jī)的掃地機(jī)器人的前景如何?
工業(yè)4.0中的機(jī)器人向協(xié)作機(jī)器人演進(jìn)
工業(yè)機(jī)器人精準(zhǔn)選型的9大參數(shù)介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論