") 升級版智能車快速轉(zhuǎn)彎的模糊自適應PID控制算法[
升級版智能車快速轉(zhuǎn)彎的模糊自適應PID控制算法[
摘要:
針對智能小車在轉(zhuǎn)向尤其是急彎時陀螺儀傳感器輸出的瞬態(tài)信號變化很快,因自身結(jié)構(gòu)和工藝限制而帶來的信號測不全、抓不好的問題,設計了一種以STM32轉(zhuǎn)彎控制芯片和FPGA為一次儀表特性改善單元控制核心的驗證方法。測試結(jié)果表明,該系統(tǒng)在對轉(zhuǎn)彎信號采集、放大后通過級聯(lián)特性改善模塊可以有效地改善傳統(tǒng)轉(zhuǎn)彎下的動態(tài)特性,提高急彎下對實時信號處理的精度。
0 引言
谷歌旗下波士頓動力公司最新發(fā)布的名為Handle的輪式機器人能力拔高到新的高度,事實上這種智慧型機器人搭載了多種諸如傳感采集模塊、環(huán)境探測以及人機交互模塊等。路況不一樣造成不同彎道的曲率不同,如何在急轉(zhuǎn)彎的情況下保持精準的感知與采存處理一直是研究的焦點所在[1]。
智能小車的轉(zhuǎn)彎控制是一個復雜的控制過程,要建立相應的數(shù)學模型,單單選用經(jīng)典的PID算法不夠精準,很難做到精確測量和估計。因此,本文提出在傳遞函數(shù)后面串聯(lián)一個動態(tài)測試修正模塊[2-4]。
1 智能車彎道設計背景
智能車要想在急轉(zhuǎn)彎路況下繼續(xù)保持穩(wěn)定、快速、安全的行駛,主要體現(xiàn)小車在運動控制上是否可以即時地進行監(jiān)測和反饋。由于被測小車所處周邊的環(huán)境復雜多變,采光條件、路面溫度、自身結(jié)構(gòu)產(chǎn)生的相對運動差以及摩擦系數(shù)都會引起智能車所帶來的參數(shù)變動和毛刺現(xiàn)象甚至是檢測盲區(qū)[5-6]。考慮到小車單方面在轉(zhuǎn)彎控制下定制控制策略會使整體運行過程的穩(wěn)定性、及時性出現(xiàn)偏差以至于沖出跑道,針對復雜多變的環(huán)境,綜合得出一個合理控制策略補償模塊,使小車在彎道環(huán)境下既能保持采集的信號可靠、穩(wěn)定,又能快速、高效、準確地在彎道上進行調(diào)姿與控制[7]。
2 系統(tǒng)硬件
2.1 主控制器模塊
本系統(tǒng)采用的主控制器是意法半導體(ST)公司設計的基于Cortex-M3內(nèi)核架構(gòu)的STM32F107嵌入式芯片,該芯片擁有高性能、低功耗、實時應用、高性價比等優(yōu)點。該芯片嵌入了256 KB Flash、64 KB SRAM以及各種外設接口(I2C、SPI、USART、CAN、USB、定時器、DMA控制器、ADC、PWM),支持JTAG和SWD調(diào)試接口,主頻最高可達72 MHz[8]。該芯片豐富的片內(nèi)資源和片上外設、精準高效的計算能力使得其十分符合系統(tǒng)要求。
2.2 電源管理模塊
系統(tǒng)總的供電電源為12 V鋰電池,電機驅(qū)動芯片采用TB6612FNG芯片,系統(tǒng)電壓經(jīng)LM2596T開關壓降轉(zhuǎn)換器轉(zhuǎn)換為5 V,再通過線性恒壓模塊AMS1117輸出為3.3 V,通過轉(zhuǎn)換芯片轉(zhuǎn)換為5 V和3.3 V后提供給系統(tǒng)的各個模塊使用。電源電路圖如圖1所示。

2.3 姿態(tài)傳感器電路設計模塊
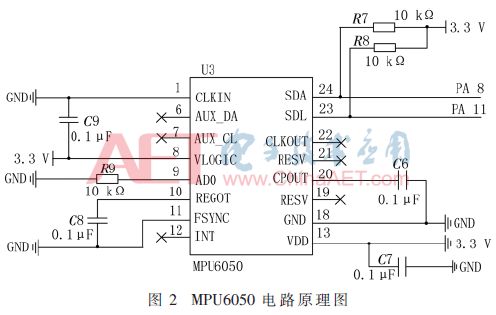
本系統(tǒng)采用的MPU6050是一個6軸傳感器芯片,內(nèi)部集成了3軸陀螺儀、3軸加速度計和1個可擴展的數(shù)字運動處理器DMP,3個16位ADC通道將加速度計和陀螺儀測得的模擬信號轉(zhuǎn)換為數(shù)字信號進行輸出,保障了測量數(shù)據(jù)的輸出精度。用戶可以根據(jù)實際需要控制傳感器的范圍,可準確追蹤小車姿態(tài)變化。MPU6050通過自帶的DMP編程實現(xiàn)自動對加速度計、陀螺儀數(shù)據(jù)進行處理,減少了主控芯片STM32的計算負擔[9]。主芯片和MPU6050傳感器電路連接圖如圖2所示,MPU6050傳感器通過傳輸速率較高的I2C總線和主芯片進行通信。
2.4 電機驅(qū)動模塊
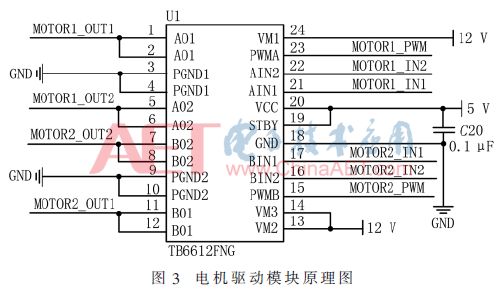
直流電機具有轉(zhuǎn)矩大、負載性好、響應速度快、運動平穩(wěn)、噪聲小等優(yōu)點,使得直流電機在移動機器人領域中的應用越來越廣泛[10-11],最常見的驅(qū)動方式是通過改變脈沖序列的周期和占空比來對電機電壓進行控制。本系統(tǒng)電機驅(qū)動芯片采用TB6612FNG[12],具有雙通道輸出,比L298N效率更高,發(fā)熱量更低,4種電機控制模式:正轉(zhuǎn)、反轉(zhuǎn)、制動、停止,通過STM32F107輸出PWM脈沖信號調(diào)整電機轉(zhuǎn)速。電機驅(qū)動模塊原理圖如圖3所示。
3 算法優(yōu)化
在系統(tǒng)轉(zhuǎn)彎時由于蘊含非常豐富的高頻分量,導致被測信號變化速度特別快。雖然陀螺儀動態(tài)響應可以滿足快速變化,但容易積累誤差。若想調(diào)理和改善傳感器的輸出信號,可以在微處理器檢測系統(tǒng)中借鑒選用信號處理的方法實時跟蹤一次儀表的動態(tài)特性。在含有動態(tài)特性級聯(lián)改善模塊的檢測系統(tǒng)中采用信號補償修正的方法實時接收感知端輸出的模擬信號并加以分析處理,在某種程度上延長中間端的幅頻特性有效段,增加了對小車系統(tǒng)的有效調(diào)理率。
基于如上原理設計一個可以與陀螺儀串聯(lián)的改善一次儀表瞬態(tài)特性的網(wǎng)絡,使一次儀表匹配該改善算法網(wǎng)絡得到的幅頻特性比未經(jīng)處理時的平坦段延長一些。修正思路如圖4所示。
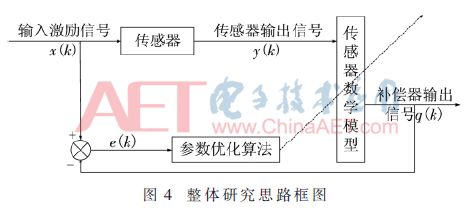
一個標準已知轉(zhuǎn)彎輸入信號由于陀螺儀有效帶寬頻率部分提取不夠而產(chǎn)生頻譜輸出失真,為此在測控電路模塊增加變形信號級聯(lián)動態(tài)特性改善網(wǎng)絡,然后通過特定的參數(shù)優(yōu)化輸出靠近一次儀表逆模型,從而中和原信號的偏移量達到修正目的。原一次儀表輸出的拉普拉斯變換與輸入的拉普拉斯變換比H(s)級聯(lián)一個延長可測線性段的動態(tài)特性模塊F(s),模塊總體的新傳遞函數(shù)為:

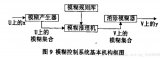
補償原理如圖5所示。
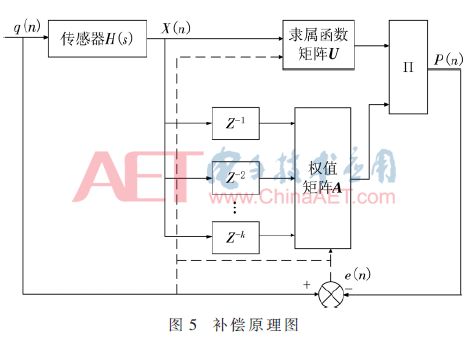
一次儀表瞬態(tài)改善網(wǎng)絡結(jié)合模糊神經(jīng)輸出與一次儀表瞬態(tài)校準信號理論輸入差值e(n),實現(xiàn)模糊神經(jīng)自適應優(yōu)化。
標準一次儀表瞬態(tài)信號用q(n)表示,需改善的一次儀表瞬態(tài)輸出用X(n)表示,模糊神經(jīng)網(wǎng)絡的輸出P(n)的階數(shù)設為k,則輸出為:

根據(jù)模糊函數(shù)在上位機訓練得出的最優(yōu)值,對于本模糊神經(jīng)網(wǎng)絡的隸屬函數(shù)矩陣,k=12,m=12。w為矩陣U的列向量由U中元素組合:
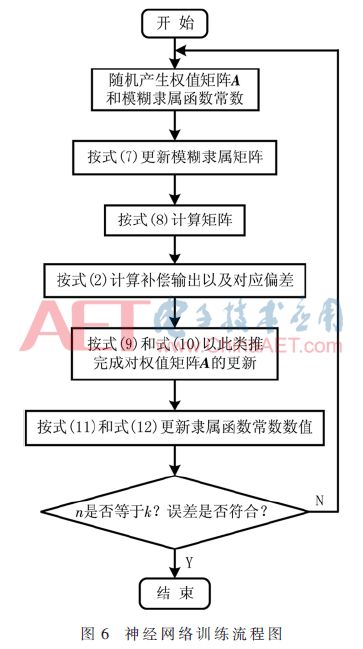
圖6為構(gòu)造改良的補償網(wǎng)路流程圖。
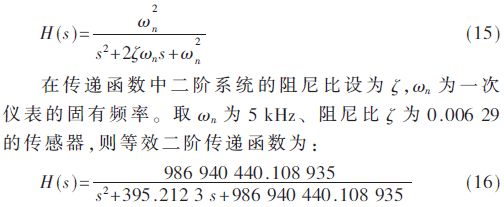
一次儀表最典型的是近似為有一個二階系統(tǒng),其傳遞函數(shù)可表示為:
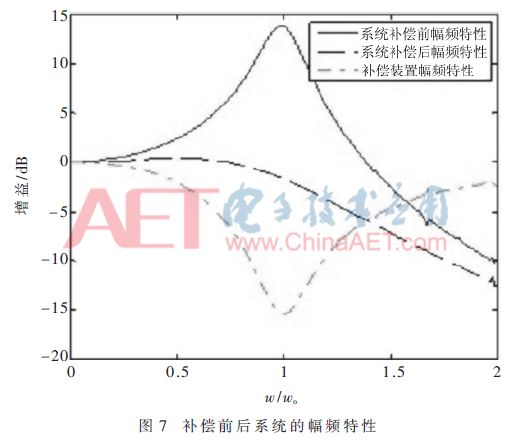
在MATLAB平臺上,用數(shù)據(jù)訓練傳感器300次后可得一次儀表動態(tài)特性改善前后時域響應。為了更好地檢測一次儀表對各個單元頻率分量的響應輸出,可采用跟蹤掃描法獲取調(diào)理前后模塊的動態(tài)特性,從而得出系統(tǒng)的幅頻特性,如圖7所示,其中w為被測信號頻率,wo為固有頻率,頻率比在0.3以內(nèi)有良好的測量精度。
4 結(jié)論
本文研究了升級版智能車快速轉(zhuǎn)彎的模糊自適應PID控制算法[13],該算法改進了傳統(tǒng)彎道快速行駛易翻倒的情況。仿真結(jié)果表明,增加補償模塊的新算法可以進行有效地維持轉(zhuǎn)彎姿態(tài),總體上精度高于傳統(tǒng)單一的模糊PID算法。如何進一步對微小姿態(tài)進行修正是下一步研究的重點。
-
傳感器
+關注
關注
2557文章
51946瀏覽量
760246 -
控制芯片
+關注
關注
2文章
532瀏覽量
39793 -
智能小車
+關注
關注
87文章
550瀏覽量
82088
原文標題:【學術論文】智能小車轉(zhuǎn)彎算法改善單元的優(yōu)化設計
文章出處:【微信號:ChinaAET,微信公眾號:電子技術應用ChinaAET】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論