") 激光雷達(dá)與雷達(dá):詳細(xì)對(duì)比
激光雷達(dá)與雷達(dá):詳細(xì)對(duì)比
我最近談到雷達(dá)和激光雷達(dá)之間的差異。我給出了有關(guān)雷達(dá)的通用答案,其分辨率和準(zhǔn)確度均高于雷達(dá)。雷達(dá)具有更長(zhǎng)的射程和更好的灰塵和煙霧條件。
當(dāng)提示為什么雷達(dá)不太準(zhǔn)確和較低的分辨率時(shí),我被問(wèn)到為什么。我有點(diǎn)嘟through了一下關(guān)于波長(zhǎng)的回應(yīng);然而我沒(méi)有很好的回應(yīng),所以這篇文章將是我更好的回應(yīng)。
LIDAR
LIDAR是光檢測(cè)和測(cè)距的簡(jiǎn)稱(chēng),它使用激光器發(fā)射并接收回傳感器。在大多數(shù)用于測(cè)繪(和自行駕駛車(chē)輛)的LIDAR傳感器中,計(jì)算發(fā)射和接收之間的時(shí)間以確定飛行時(shí)間(ToF)。知道波浪返回的光速和(1/2的時(shí)間)(因?yàn)?a target="_blank">信號(hào)傳出和返回),我們可以計(jì)算出物體離光線(xiàn)有多遠(yuǎn)的距離,從而使光線(xiàn)反射回來(lái)。該值是傳感器報(bào)告的范圍信息。LIDAR通常使用近紅外光,可見(jiàn)光(但不是真正可見(jiàn)的)和紫外光譜。
有一些傳感器使用三角測(cè)量來(lái)計(jì)算位置(而不是ToF)。這些通常是高精度,高分辨率的傳感器。這些傳感器非常適合驗(yàn)證裝配線(xiàn)上的組件或檢查航天飛機(jī)上的熱瓦損壞。但是,這不是這篇文章的重點(diǎn)。
LIDAR數(shù)據(jù)。頂部顯示反射率數(shù)據(jù)。底部顯示距離數(shù)據(jù)的亮點(diǎn)越遠(yuǎn)。[來(lái)源]
激光束也可以聚焦成具有很小的光斑尺寸,不會(huì)擴(kuò)大很多。這個(gè)小光斑大小可以幫助提供高分辨率。如果您有旋轉(zhuǎn)鏡(通常是這種情況),那么您可以在每度左右(基于指向機(jī)制的精確度)拍攝激光,以提高分辨率。LIDAR在0.25度角分辨率下工作并不罕見(jiàn)。
雷達(dá)
雷達(dá)是無(wú)線(xiàn)電探測(cè)和測(cè)距的縮寫(xiě),它使用無(wú)線(xiàn)電波來(lái)計(jì)算速度和/或距離。無(wú)線(xiàn)電波與物體接觸時(shí)的光波吸收較少(衰減較小),所以它們可以在較長(zhǎng)的距離上工作。正如您在下面的圖片中看到的那樣,RF波的波長(zhǎng)比激光雷達(dá)波大。不利的一面是,如果一個(gè)物體比正在使用的RF波小得多,物體可能不能反射足夠的能量來(lái)檢測(cè)。出于這個(gè)原因,許多雷達(dá)用于障礙探測(cè)將是“高頻”,因此波長(zhǎng)更短(因此我們?yōu)槭裁唇?jīng)常在機(jī)器人中使用毫米波),并可以探測(cè)到較小的物體。然而,由于激光雷達(dá)的波長(zhǎng)明顯較小,它們通常仍然具有更好的分辨率。
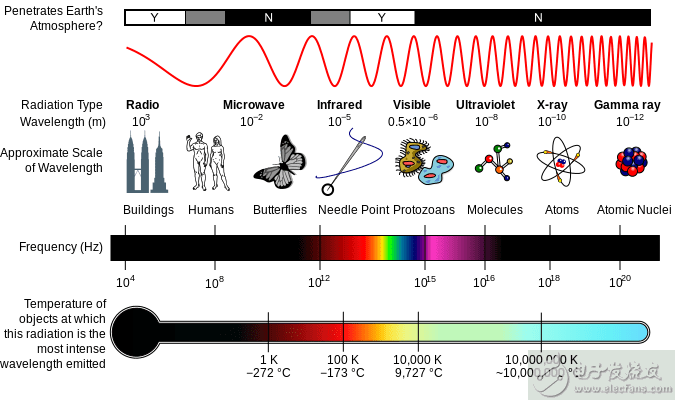
電磁頻譜在雷達(dá)左側(cè)一直顯示無(wú)線(xiàn)電波,LIDAR的右側(cè)顯示近紅外/可見(jiàn)/紫外波。
資料來(lái)源:美國(guó)國(guó)家航空航天局的Inductiveload [GFDL(http://www.gnu.org/copyleft/fdl.html),通過(guò)維基共享資源
我所見(jiàn)過(guò)的大多數(shù)RADAR的視野都很窄(10度),然后只返回一個(gè)值(或者它們可能有幾十個(gè)通道,參見(jiàn)下面的多模雷達(dá)),其范圍為檢測(cè)到的物體。一些系統(tǒng)可以使用多個(gè)通道來(lái)獲取距離測(cè)量的角度。角度不會(huì)像大多數(shù)LIDAR那樣高。市場(chǎng)上還有一些雷達(dá)用于掃描以獲得多種測(cè)量結(jié)果。這兩種方法是一種旋轉(zhuǎn)天線(xiàn)(例如您在機(jī)場(chǎng)或船上看到的)或電子“旋轉(zhuǎn)”,這是一種使用多個(gè)內(nèi)部天線(xiàn)而沒(méi)有移動(dòng)部件的設(shè)備。更高級(jí)的(更新的)RADAR可以完成跟蹤多個(gè)對(duì)象的任務(wù)。在很多情況下,它們實(shí)際上不會(huì)返回勾畫(huà)物體的點(diǎn)(如激光雷達(dá)),但會(huì)將范圍,方位和速度(范圍速率)返回到檢測(cè)到的物品的估計(jì)質(zhì)心。如果多個(gè)物體彼此靠近,傳感器可能會(huì)將它們混淆為一個(gè)大物體并返回一個(gè)質(zhì)心范圍[這里是閱讀的來(lái)源和一個(gè)很好的參考]。
使用多普勒頻移,物體的速度也可以用相對(duì)較少的計(jì)算量輕松確定。如果RADAR傳感器和檢測(cè)到的物體都在移動(dòng),那么您將獲得兩個(gè)物體之間的相對(duì)速度。
![[資源]](http://file.elecfans.com/web1/M00/50/3E/pIYBAFrwQVmAd9jGAAFHLebpPxw888.png?resize=600%2C431)
[來(lái)源]
使用雷達(dá)時(shí),通常有兩種操作模式:
1.飛行時(shí)間- 這與上述LIDAR傳感器類(lèi)似,然而它使用無(wú)線(xiàn)電波脈沖進(jìn)行飛行時(shí)間計(jì)算。由于傳感器是脈沖式的,所以知道脈沖何時(shí)被發(fā)送,因此計(jì)算范圍可以比連續(xù)波傳感器更容易(如下所述)。傳感器的分辨率可以通過(guò)改變脈沖寬度和聽(tīng)取響應(yīng)的時(shí)間長(zhǎng)度(回?fù)簦﹣?lái)調(diào)整。這些傳感器通常具有固定的天線(xiàn),導(dǎo)致視野小(與LIDAR相比)。
有一些系統(tǒng)將多個(gè)ToF無(wú)線(xiàn)電波合并成一個(gè)具有不同脈沖寬度的封裝。這將允許以更高的準(zhǔn)確度檢測(cè)各種范圍。這些有時(shí)稱(chēng)為多模雷達(dá)
2.連續(xù)波- 這種方法頻率調(diào)制(FMCW)波,然后將反射信號(hào)的頻率與發(fā)射信號(hào)進(jìn)行比較以確定頻移。該頻移可以用來(lái)確定反射它的物體的范圍。物體離傳感器越遠(yuǎn)(在一定范圍內(nèi))越大。計(jì)算頻移和相應(yīng)的范圍在計(jì)算上比ToF更容易,再加上電子設(shè)備更容易,更便宜。這使得連續(xù)調(diào)頻系統(tǒng)非常流行。另外,由于經(jīng)常使用單獨(dú)的發(fā)射和接收天線(xiàn),所以這種方法可以連續(xù)地同時(shí)發(fā)射和接收;不同于需要傳輸?shù)拿}沖ToF方法,然后等待響應(yīng)。
還有另一種版本的連續(xù)波雷達(dá),其波形沒(méi)有被調(diào)制。這些系統(tǒng)價(jià)格便宜,可以利用多普勒效應(yīng)快速檢測(cè)速度,但它們無(wú)法確定范圍。在范圍不重要的情況下,他們經(jīng)常被警察用來(lái)檢測(cè)車(chē)速[維基百科]。
SONAR
不相關(guān),但是當(dāng)我們查看上面的頻譜時(shí),我應(yīng)該注意到聲納或聲音導(dǎo)航和測(cè)距可以在兩種模式下工作,如雷達(dá)。所用的波長(zhǎng)比RADAR更大。它在前面顯示的光譜圖像的左側(cè)偏離圖表。
我應(yīng)該指出,有很酷的成像聲納傳感器。總的想法是,您可以使感測(cè)波垂直,使水平分辨率非常精細(xì)(<1度),垂直分辨率更大(10+度)。然后,您可以將這些光束中的許多相互靠近放置在傳感器封裝中。有類(lèi)似的軟件包可以用小波長(zhǎng)的雷達(dá)來(lái)實(shí)現(xiàn)這一點(diǎn)。
成本
$$$
由于以下幾個(gè)原因,LIDAR傳感器比RADAR傳感器成本更高:
1.使用ToF的LIDAR需要高成本的電子設(shè)備,成本更高
2. LIDAR傳感器需要CCD接收器,光學(xué)器件,電機(jī)和激光器來(lái)產(chǎn)生和接收所使用的波。雷達(dá)只需要一些固定天線(xiàn)。
3. LIDAR傳感器具有旋轉(zhuǎn)部件進(jìn)行掃描。這需要電機(jī)和編碼器。雷達(dá)只需要一些固定天線(xiàn)。(我知道這有些類(lèi)似于上面的行)。
計(jì)算地說(shuō)話(huà)
由于RADAR傳感器只返回一個(gè)點(diǎn)或幾十個(gè)點(diǎn),因此往往會(huì)產(chǎn)生更少的數(shù)據(jù)。當(dāng)傳感器是多通道時(shí),它通常只是將范圍/速度返回到幾個(gè)質(zhì)心(ish)物體。激光雷達(dá)傳感器正在發(fā)送大量有關(guān)距離數(shù)據(jù)的每個(gè)激光點(diǎn)的數(shù)據(jù)。然后由用戶(hù)決定是否有用。使用RADAR你有一個(gè)簡(jiǎn)單的號(hào)碼,但這個(gè)號(hào)碼可能不是最好的。利用LIDAR,它取決于機(jī)器人技術(shù)人員生成算法來(lái)檢測(cè)各種物體并辨別傳感器正在查看的內(nèi)容。
如果你的目標(biāo)是在你面前探測(cè)一輛汽車(chē)(或朝你駕駛)并獲得它的速度,雷達(dá)可能會(huì)很棒。如果您試圖確定物品的準(zhǔn)確位置,生成表面貼圖或找到小型柵欄,LIDAR可能會(huì)做得更好。請(qǐng)記住,如果您在灰塵或雨中,激光雷達(dá)可能會(huì)在傳感器附近返回一點(diǎn)點(diǎn)云(因?yàn)樗鼤?huì)讀取所有這些粒子/滴)。而雷達(dá)可能會(huì)做得更好。
-
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3991瀏覽量
190093 -
LIDAR
+關(guān)注
關(guān)注
10文章
327瀏覽量
29456
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一則消息引爆激光雷達(dá)行業(yè)!特斯拉竟然在自研激光雷達(dá)?
激光雷達(dá),明年要降價(jià)至200美元

激光雷達(dá)會(huì)傷害眼睛嗎?

激光雷達(dá)的維護(hù)與故障排查技巧
激光雷達(dá)技術(shù)的基于深度學(xué)習(xí)的進(jìn)步
激光雷達(dá)在農(nóng)業(yè)中的創(chuàng)新應(yīng)用
激光雷達(dá)技術(shù)的發(fā)展趨勢(shì)
光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
一文看懂激光雷達(dá)

基于FPGA的激光雷達(dá)控制板

硅基片上激光雷達(dá)的測(cè)距原理

激光雷達(dá)的探測(cè)技術(shù)介紹 機(jī)載激光雷達(dá)發(fā)展歷程

華為詳細(xì)解讀激光雷達(dá)
激光雷達(dá)LIDAR基本工作原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論