

在計算機網絡及其相關網絡通信技術迅猛發展的推動下,為確保在進行信息資源共享時所獲得的數據、文件和圖形等資料具有高度的真實可靠性、連續性和高保真度UPS(不間斷電源)正越來越廣泛地被應用到國民經濟的各個領域。同時,隨著信息技術的發展,智能信息處理以及基于網絡的遠程監控等新技術逐步應用于UPS中,構成了全智能化的UPS系統,方便了用戶、提高了可靠性。本文著重介紹UPS控制技術,分析了UPS的PID控制技術的特性并深入分析了基于PID控制和重復控制的復合控制策略。
控制策略概述
UPS逆變器的數字控制技術成為了當前逆變器研究領域的一個熱點,出現了多種逆變器數字化控制方法,包括數字PID控制、狀態反饋控制、無差拍控制、重復控制、模糊控制等,有力地推動了UPS技術的發展。
每一種控制方案都各有其長短。某些控制方法雖然具有較好的動態響應速度,但穩態輸出電壓諧波失真度又達不到要求;某些控制方法雖然同時具有較高的動態和穩態精度,但它對參數變化很敏感,魯棒性不好;某些控制方法有很好的穩態精度,但動態響應效果卻很差;某些控制方法受硬件水平的限制,目前還不能得到很好的應用。因此,一種必然的發展趨勢是各種控制方案互相滲透,相互取長補短,構成復合的控制方案。
數字PID控制
在UPS逆變器控制中,最常用、最簡單的方法是PID控制,具體實現方式包括電壓瞬時值反饋控制和電壓電流雙閉環反饋控制,圖1所示為電壓瞬時值反饋控制。
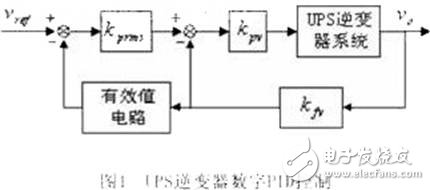
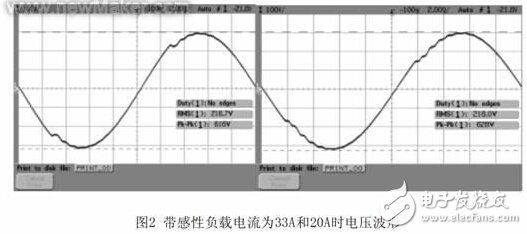
電壓瞬時值反饋的控制策略優點是只使用了一個電壓傳感器,缺點是系統動態響應特性不好,跟蹤特性不是很好, 波形質量欠佳。圖2為采用此控制方法在10KVA逆變器上帶容性負載時的輸出電壓波形。從圖中可以看出波形失真度較大,難以滿足高質量電源的要求。
改善電壓源逆變器的動態特性的方法之一是增加一個電流閉環。在這種控制策略中,濾波電容的電流(也就是輸出電壓的微分)作為一個反饋變量引入到控制系統中,達到改善輸出波形質量,它必須使用一個霍爾傳感器來檢測濾波電容電流,增加了系統的復雜性和成本。
基于PID控制和重復控制的復合控制
逆變器控制器是一個參考給定呈正弦變化的調節系統,而不是一個恒值給定的調節系統。同時,系統的擾動即負載電流,也不是一個恒值擾動,當接線性負載時,負載電流呈正弦變化;而當帶非線性負載時,電流按非正弦規律變化。針對正弦指令的無靜差跟蹤問題,可以在控制器中植入一個與參考給定同頻的正弦信號模型。
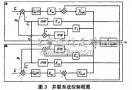
前饋控制的目的是改善數字PID控制器的控制效果,進一步減小動態過程中輸出電壓的波動和波形畸變,改善數字PID控制系統的穩定性。離散重復控制器,用來消除系統的周期性跟蹤誤差,減小UPS逆變器帶非線性整流負載時的輸出電壓波形畸變。數字PID控制器,作用是對輸出電壓跟蹤誤差進行實時調整,減小系統受到干擾時的輸出電壓波動和畸變。控制框圖如圖3所示。圖中主要環節介紹如下:
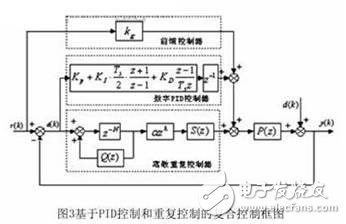
1)z-N :周期延遲環節,使本周期誤差信息從下一周期開始影響矯正量。
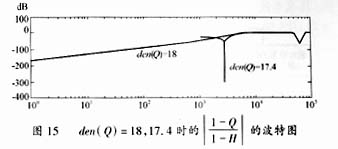
2)Q(z) :為克服對象模型不精確,增強系統穩定性而設置的。可取一個小于1的常數。
3)S(z) :補償環節,用于改造對象特性。
4)zk :相位補償,滿足系統頻率響應要求。
5)a :比例因子。用來維持系統的穩定性。
實驗結果
依照上述模型,用simulink仿真可初步確定控制器的參數,開始用較保守的參數在10KVA的逆變模塊上試驗.,調整參數使系統達到較好的靜動態特性。系統參數為:輸入直流電壓為200V、輸出頻率50HZ、開關頻率19.6HZ、濾波電感120uH、濾波電容15uF。圖4左為帶阻性負載,電流為36A時的電壓電流波形;右為帶整流性負載,電流為20A時的電壓電流波形。
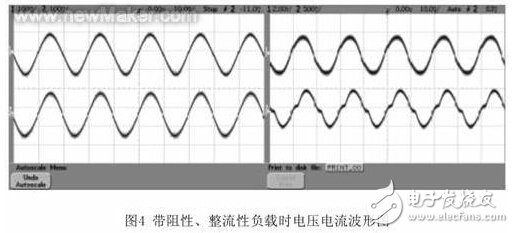
從以上兩圖可以看出,基于PID控制和重復控制的復合控制策略具有較好的波形控制效果,特別是對非線性整流負載具有很好的諧波抑制效果,同時系統還具有較好的動態響應特性。因此,本文介紹的基于PID控制和重復控制的復合控制策略具有較高的應用價值。
-
UPS
+關注
關注
21文章
1215瀏覽量
92858 -
PID控制
+關注
關注
10文章
461瀏覽量
40850
發布評論請先 登錄
相關推薦







 工商網監
工商網監

評論