

隨著汽車工業的不斷進步,汽車網絡技術也經歷了從簡單到復雜、從低帶寬到高帶寬的演變過程。最初,汽車內部的電子控制單元(ECU)之間的通信主要依賴于控制器局域網絡(CAN)總線。CAN總線于1980年代由博世公司開發,旨在提高汽車電子系統的可靠性和效率。它以其高抗干擾能力和實時性,迅速成為汽車行業的標準通信協議,廣泛應用于發動機管理、車身控制等多個領域。然而,隨著汽車電子設備數量的激增和功能的日益復雜,傳統的CAN總線在數據傳輸速率和帶寬方面逐漸顯露出局限性。為了滿足日益增長的智能化功能需求,汽車行業參與者們開始探索更高效的網絡技術。十多年之前以太網技術的引入為汽車網絡的發展帶來了新的機遇。以太網以其高帶寬、靈活性和成熟的生態系統,逐漸成為汽車網絡的重要組成部分。
隨著智能化水平的不斷提升,如何升級汽車網絡技術來滿足整車開發需求:
對于新功能,需要縮短從研發到量產時間;
對于AI技術的引入,需要給算力平臺提供更多實時整車數據
因此網絡技術無論是以太網還是CAN總線都需要對高帶寬、低延遲、高安全性的性能要求持續提升予以關注與投入。CAN XL作為下一代的CAN技術已經在2024版更新的 ISO11898-1,ISO11898-2中正式支持,標志著在技術上已經走向成熟。新CAN標準無論是在物理通信速率上、網絡協議兼容性上都將助力汽車智能化、軟件定義汽車的趨勢。
其主要技術特點有:
傳輸速率能夠達到20Mbit/s
支持大數據傳輸,單幀數據能夠達到2048字節
支持以太網透傳,支持當前車載以太網常用協議,例如:TCP/IP,SOME/IP等
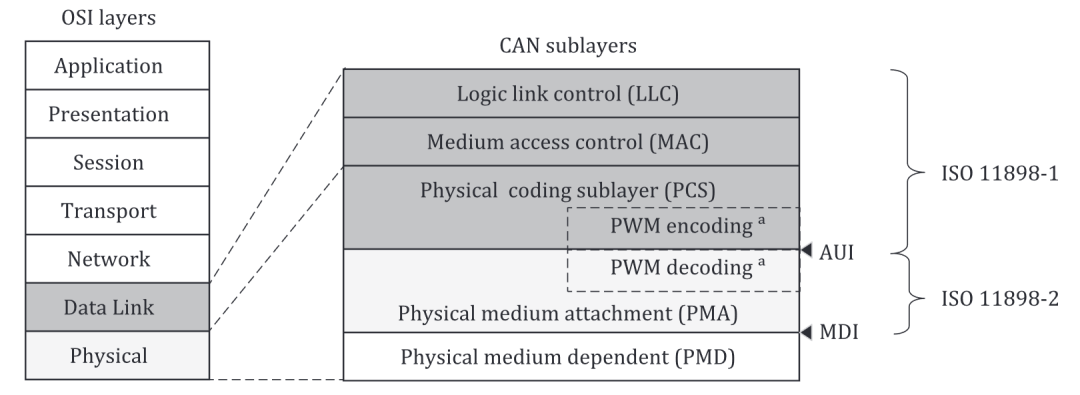
圖 1 CAN物理層與數據鏈路層在ISO標準組織中
來源:www.iso.org, a:表示只有CAN XL支持
在接下來的文章中,我們將深入探討CANXL對于在整車網絡架構應用中的優勢,以及未來可能的發展方向。通過對這一領域的深入了解,我們可以更好地把握汽車行業的未來趨勢。
驅動軟件定義整車變革的網絡技術
將SOA架構推廣至整車網絡中
SOA是一種軟件設計方式,在SOA中服務由應用組件通過網絡上的通信協議提供給其他組件使用。其原理獨立于供應商和其他技術,SOA是將軟硬件和EEA進行抽象的一種方法,其關鍵的就在于設備抽象化與軟件的復用性。
當前由于通信協議的限制,SOA架構往往只在Ethernet網絡下實現。在上文中可以看到在整個整車網絡中,還有大量控制器節點采用的是CAN通信的方式,如果未來需要支持SOA服務化,那么CANXL將會既能兼容當下以信號為主的CAN通信方式,還能夠以IP為主的SOA通信協議。
在AUTOSAR R23-11已經集成支持CAN XL的標準接口,CanIf與EthIf同時能夠訪問CAN XL Driver。同時在網絡協議商Vector中也提出了支持基于SOME/IP協議基于CANXL的解決方案。這樣能夠有效地拓展SOA協議至CAN網絡中,當然CAN網絡中并不是所有的通信節點必須支持SOA,開發人員可以根據自身的設計目標逐步推廣。
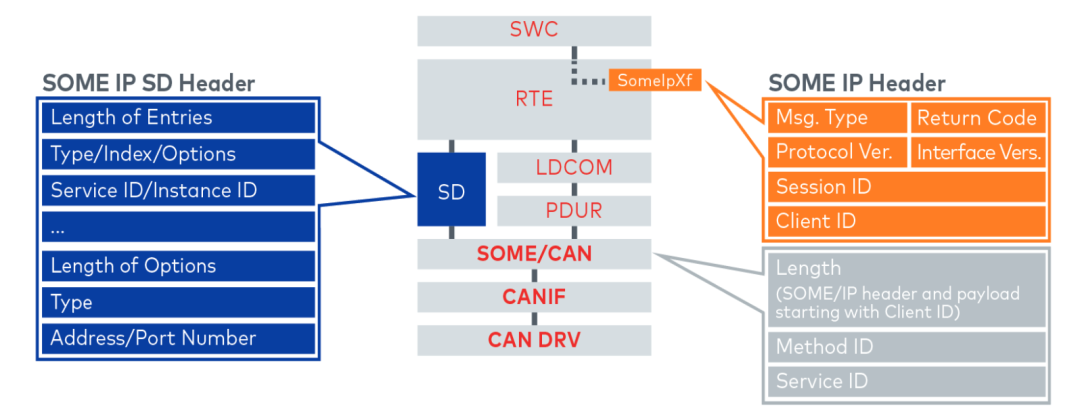
圖 2 采用SOME/IP與SOME/CAN的CAN網絡架構
來源:Vector
“ IP Concepts With CAN XL-Transformation of SOME/IP towards SOME/CAN”
提高整車時間同步整體性能
在整車網絡架構中,網絡各個節點之間需要持續精準協調與控制需要牽涉到時間同步問題,而在當下以以太網與CAN網絡作為主要參與總線技術背景下,其時間同步策略如圖3所示。可以看到在以太網與CAN網絡之間存在著時鐘網關,需要在軟件層面進行時間數據轉換,因此將會產生時間延遲等誤差。
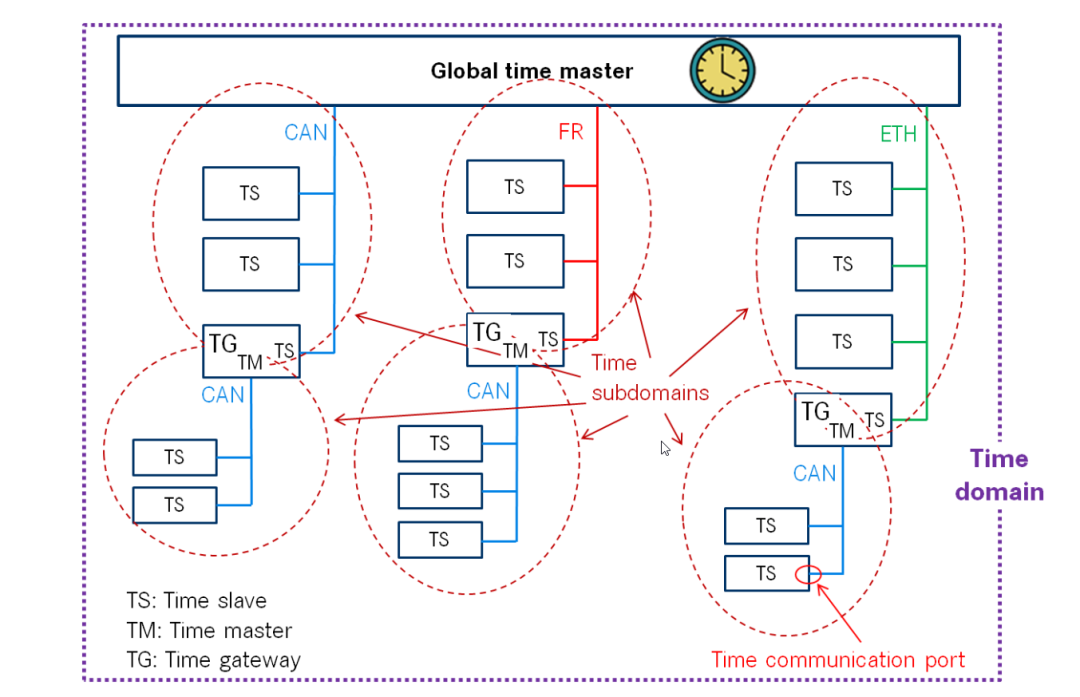
圖 3 以太網與CAN網絡時間同步架構示意圖
來源:AUTOSAR
“Specification of Time Synchronization over CAN”
在CAN XL的技術方案中因為有以太網數據透傳技術所以可以采用基于以太網協議的時間同步技術。且在第二層數據鏈路層通過硬件完成,將為大大降低從Ethernet轉發至CAN XL總線上的轉發延遲。圖 4為基于CANXL技術下可以支持時間同步的解決方案。
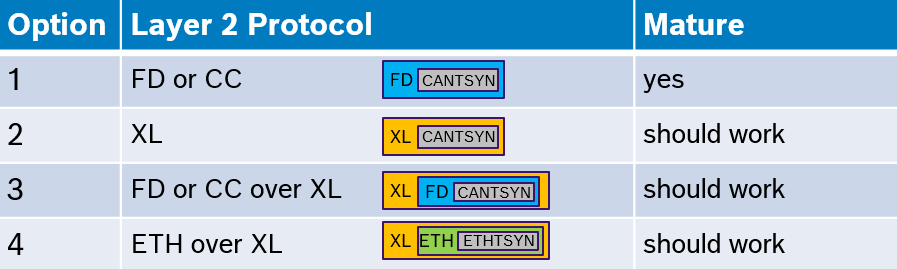
圖 4 CANXL能夠兼容兩種AUTOSAR時間同步協議
來源:博世
CC:Classic CAN,FD:CANFD,XL:CAN XL
增強整車安全冗余性
隨著自動駕駛輔助系統越來越普及以及端到端AI大模型在車內使用的推廣,國內車廠已明確了未來規模化推廣的時間表。同時,國內外車廠在底盤線控轉向系統的應用以及國家法規對于線控轉向要求的明確與落地同樣加速未來整車的進一步提升安全冗余的系統架構。那么,對于網絡通信同樣需要討論這一話題。在主干網絡形成以車載以太網環形網絡作為主要設計方案之后,如何保證車輛決策控制單元與核心執行層控制單元的安全有效通信將成為主要考慮因素。正如圖 2所展現的,決策控制單元至執行控制單元的網絡鏈接更多是采用CAN通信連接,那么提升以及增加CAN通信帶寬、硬件接口將是簡單有效的措施。
此外,對于L3以上的自動駕駛場景,需要考慮“最小風險操縱”(Minimum Risk Manoeuvre,MRM),即潛在的極端失效場景。如果決策單元出現異常,系統應采取哪些措施,以及是否存在冗余決策單元進行決策控制,將至關重要。同時,冗余決策單元在此場景下也需要獲取環境感知信息,因此冗余感知通信網絡的設計也需納入考慮。當前,感知傳感器方面,攝像頭主要采用SerDes接口,激光雷達以以太網為主,而毫米波雷達和超聲波雷達則主要依賴CAN網絡。如何設計這些安全冗余性系統將由系統設計者決定,但基于CAN網絡通信的解決方案將是最具性價比的選擇。
圖 5 自動駕駛高階冗余系統
可以從CANXL得到的收益
從CARIAD SE在CiA發表的關于提升至CANXL的網絡性能的總結來看,CANXL基于當下在整車CAN網絡負載壓力較大下,具有明顯的改善作用;且網絡設計優化較為簡單靈活。
場景一:兩條CANFD總線合到一條CANXL總線
兩條CAN FD總線(500kbit/s仲裁段速率和5Mbit/s數據段速率)通信數據幀直接合并到一條CAN XL總線上(500kbit/s仲裁段速率,10Mbit/s和20Mbit/s數據段速率)。從下圖可以看到在CANXL上的總線負載性能指標與理論接近、延遲與抖動也與CANFD表現一致。
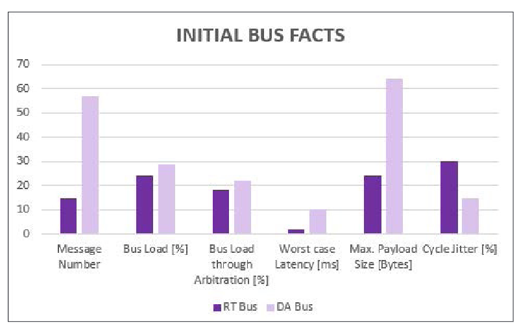
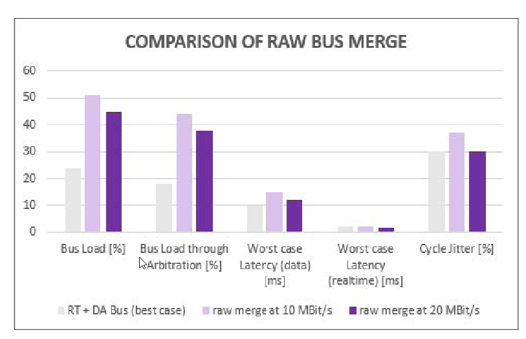
圖 6 CANFD 數據直接合并后在 CANXL 性能前后對比
來源:CARIAD SE
“Migrating from Flexray to CAN XL”
www.can-cia.org
左圖為原始CANFD參數性能
右圖是CANFD、CANXL(10M)、CANXL(20M)的性能比較
場景二:在CANXL總線上優化發送節點的數據幀矩陣,滿足降低總線負載為目的
以上層應用端傳輸數據優化為主,把優先級接近的、循環周期接近的數據幀進行合并。則前后對比發現總線負載在10Mbit/s下比優化前降低超過50%,在20Mbit/s下降低接近70%,在延遲與抖動方面由于數據幀數量減少也帶來性能提升。
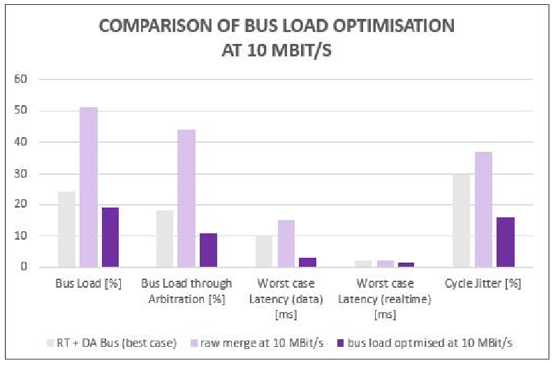
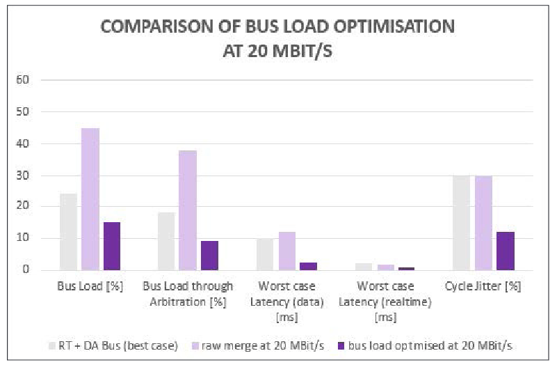
圖 7 CANXL數據幀設計優化后,性能前后對比
來源:CARIAD SE
“Migrating from Flexray to CAN XL”
www.can-cia.org
場景三:在CANXL總線上采取ALL in 1
每個發送節點都使用一條數據幀,以原先最高優先級以及最短發送周期構建。根據當前的網絡信號定義,最大數據為360字節(遠小于設計最大2024字節)。延遲與抖動性能又進一步降低。
在國內市場,汽車正經歷從電動化向智能化的快速轉型,整車電子電氣架構也在不斷優化以適應這一趨勢。新技術和新功能的引入要求解決方案具備向下兼容性和持續可擴展性,以滿足未來發展的需求。在這一背景下,CAN XL作為下一代汽車網絡通信技術,不僅提供了更高的數據傳輸速率和更大的帶寬,還支持更復雜的網絡拓撲結構,使得車輛內部各個電子控制單元(ECU)之間的通信更加高效和靈活。這一技術的應用將進一步推動智能駕駛、車聯網等新興應用的發展,提升車輛的智能化水平。
在日益激烈的市場競爭中,網絡設計的要求愈發嚴格,必須重點關注性能、安全性和可持續性等關鍵評價因素。CAN XL的引入,不僅提升了數據傳輸的效率和可靠性,還為未來的功能擴展和技術升級提供了更為堅實的基礎。這不僅關乎用戶體驗,也直接影響到整車競爭力的持續提升。通過采用CAN XL技術,汽車制造商能夠更好地應對市場需求變化,推動行業的創新與發展。
-
汽車電子
+關注
關注
3034文章
8191瀏覽量
169004 -
CAN
+關注
關注
57文章
2828瀏覽量
466152 -
ecu
+關注
關注
14文章
903瀏覽量
55292 -
汽車網絡
+關注
關注
0文章
66瀏覽量
15020
原文標題:驅動軟件定義汽車的網絡技術及CAN XL的優勢
文章出處:【微信號:AE_China_10,微信公眾號:博世汽車電子事業部】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
無線傳感器網絡技術及應用現狀
LTE與WiFi網絡技術有什么區別?
軟件定義網絡技術現狀分析







 工商網監
工商網監

評論