

不管是最新的Cortex-M85內核,還是經典的Cortex-M3內核單片機,都集成了SysTick模塊。
cm3.h與cm85.h
單片機開發者,接觸最多的就是core_cm3.h(core_cm85.h)文件,這里定義了與內核相關的大部分內容,平時我們調用最多也是這里的接口。我們對比一下這兩個源文件:
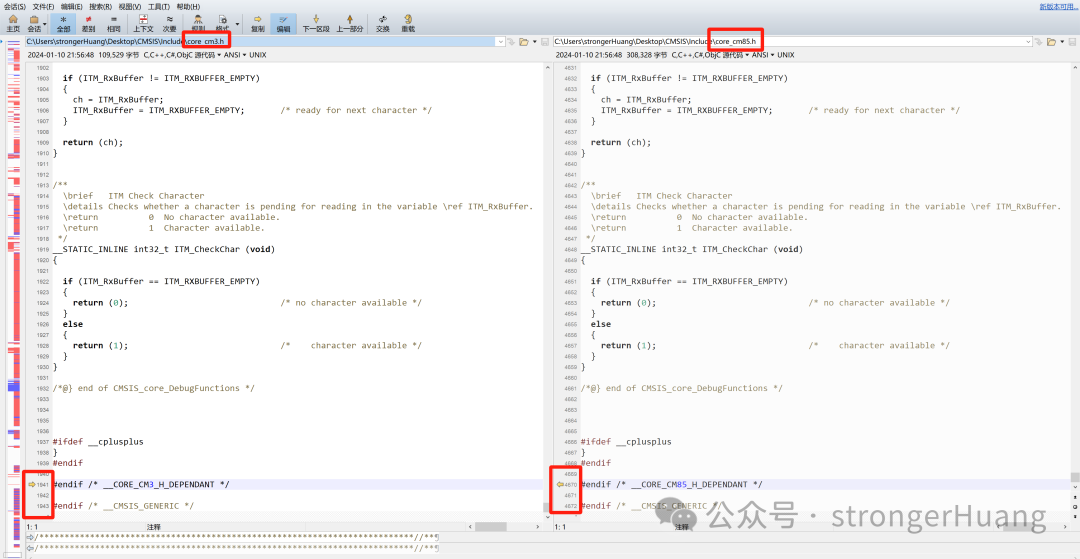
通過對比源代碼,你會直觀地發現,cm85比cm3代碼行數明顯大多了,1943行和4672行。當然,行數多了這么多,左側紅色(差異)部分也比較多。
雖然,左側“紅色”比較多,但大部分都是多出來的行數以及宏定義。仔細對比,其實很多都是一樣的,比如我們常用的系統復位函數:
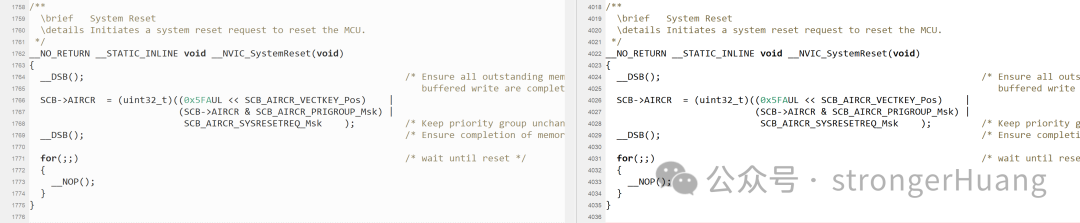 ?
?__NO_RETURN __STATIC_INLINEvoid__NVIC_SystemReset(void)
{
__DSB(); /* Ensure all outstanding memory accesses included
buffered write are completed before reset */
SCB->AIRCR = (uint32_t)((0x5FAUL << SCB_AIRCR_VECTKEY_Pos) ? ?|
(SCB->AIRCR& SCB_AIRCR_PRIGROUP_Msk) |
SCB_AIRCR_SYSRESETREQ_Msk ); /* Keep priority group unchanged */
__DSB(); /* Ensure completion of memory access */
for(;;) /* wait until reset */
{
__NOP();
}
}再比如系統Tick配置函數:
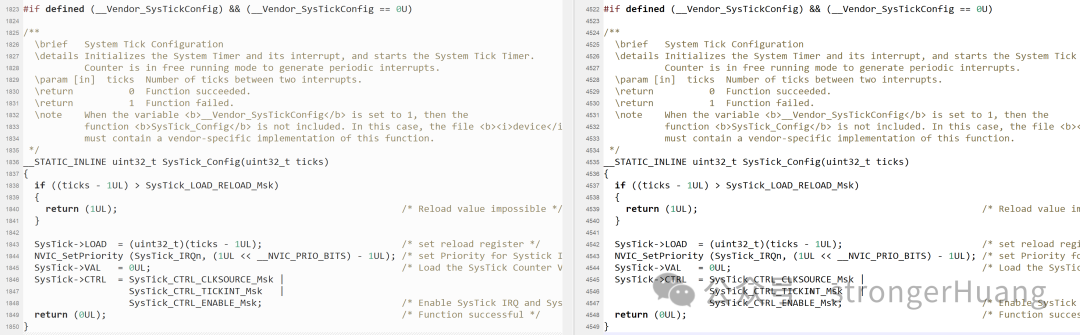 ?
?__STATIC_INLINEuint32_tSysTick_Config(uint32_tticks)
{
if((ticks -1UL) > SysTick_LOAD_RELOAD_Msk)
{
return(1UL); /* Reload value impossible */
}
SysTick->LOAD = (uint32_t)(ticks -1UL); /* set reload register */
NVIC_SetPriority(SysTick_IRQn, (1UL<< __NVIC_PRIO_BITS) -?1UL);/* set Priority for Systick Interrupt */
SysTick->VAL =0UL; /* Load the SysTick Counter Value */
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_TICKINT_Msk |
SysTick_CTRL_ENABLE_Msk; /* Enable SysTick IRQ and SysTick Timer */
return(0UL); /* Function successful */
}
其實,你會發現,在Cortext-M3單片機上常用的這些函數接口,基本和CM85一樣,這也說明CM85大部分接口向下兼容CM3。
RA8單片機SysTick使用描述
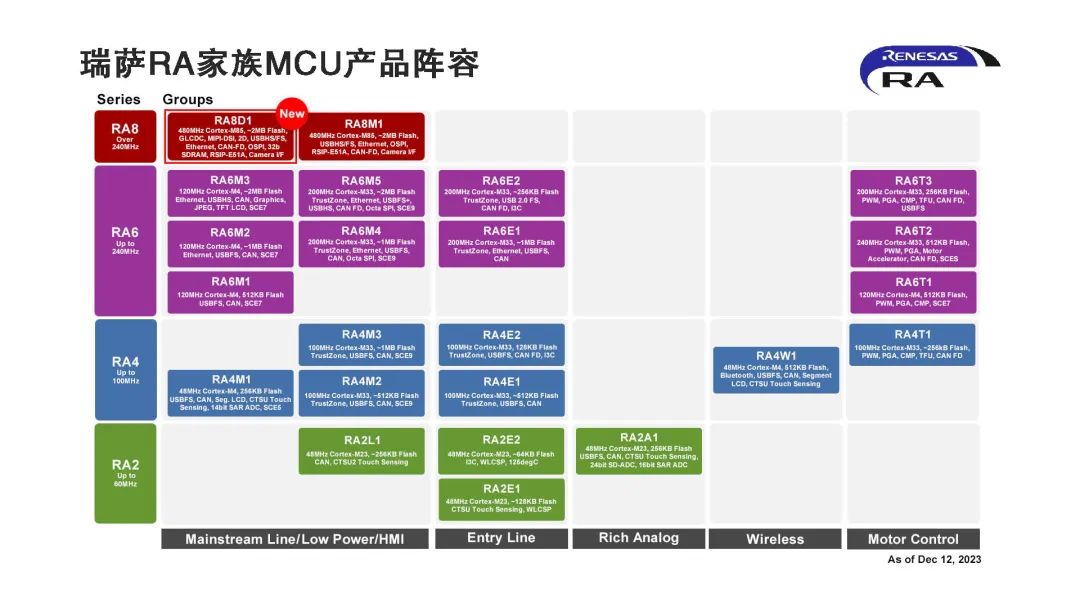
這里結合瑞薩RA8D1(Cortex-M85內核)單片機給大家講述一下SysTick的用法以及描述其源碼。
使用e2studio以及fsp軟件包
工具自帶的軟件包其實是最實用的,這里以IO翻轉,SysTick延時為例,手把手教大家創建一個工程,并演示效果。
1
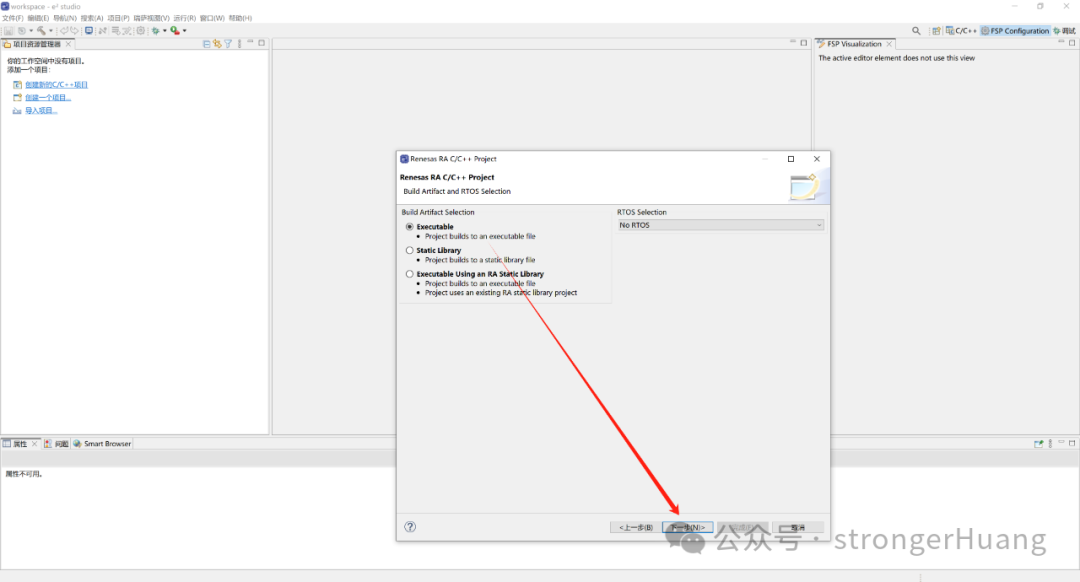
打開e2studio創建單片機項目
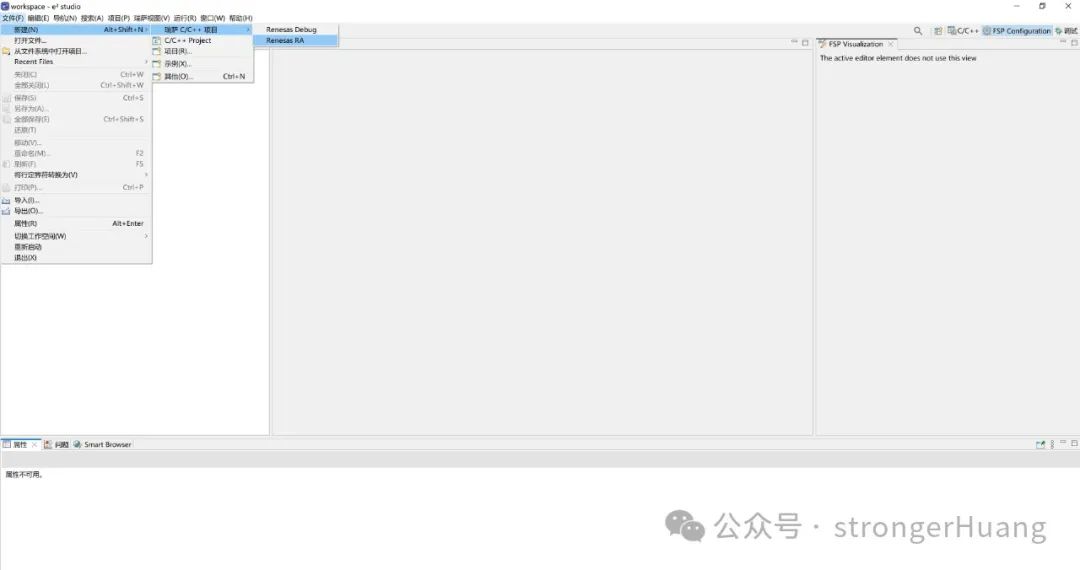
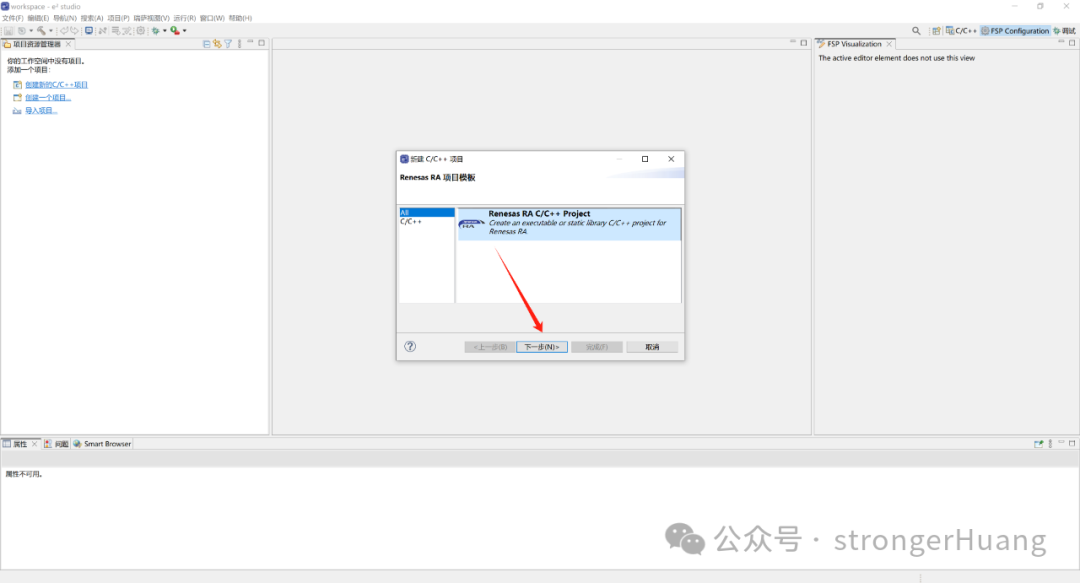 我們命名項目名稱為:RA8D1_SysTick
我們命名項目名稱為:RA8D1_SysTick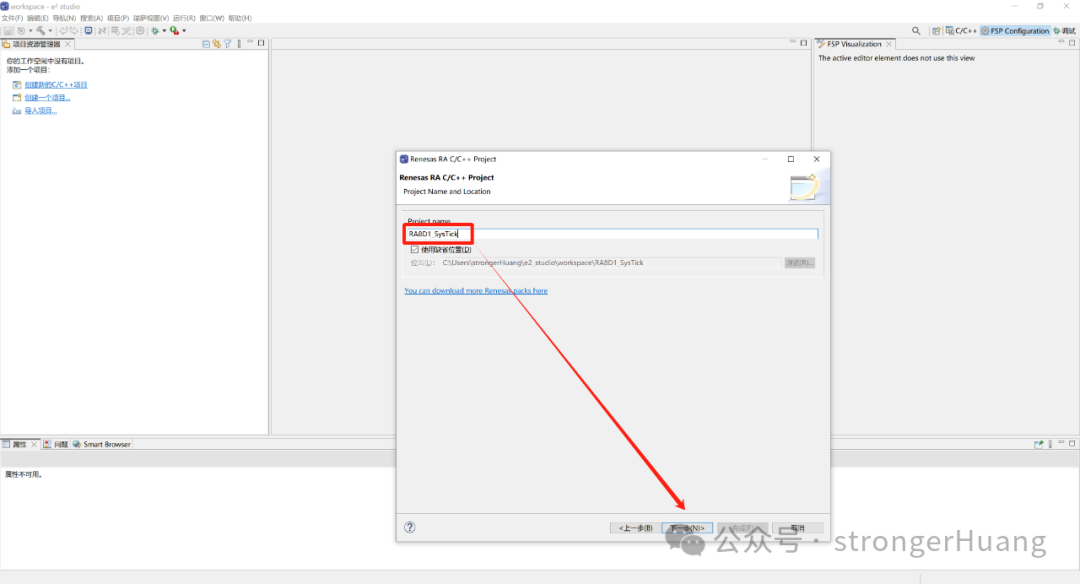 選擇對應芯片型號:R7FA8D1BEC
選擇對應芯片型號:R7FA8D1BEC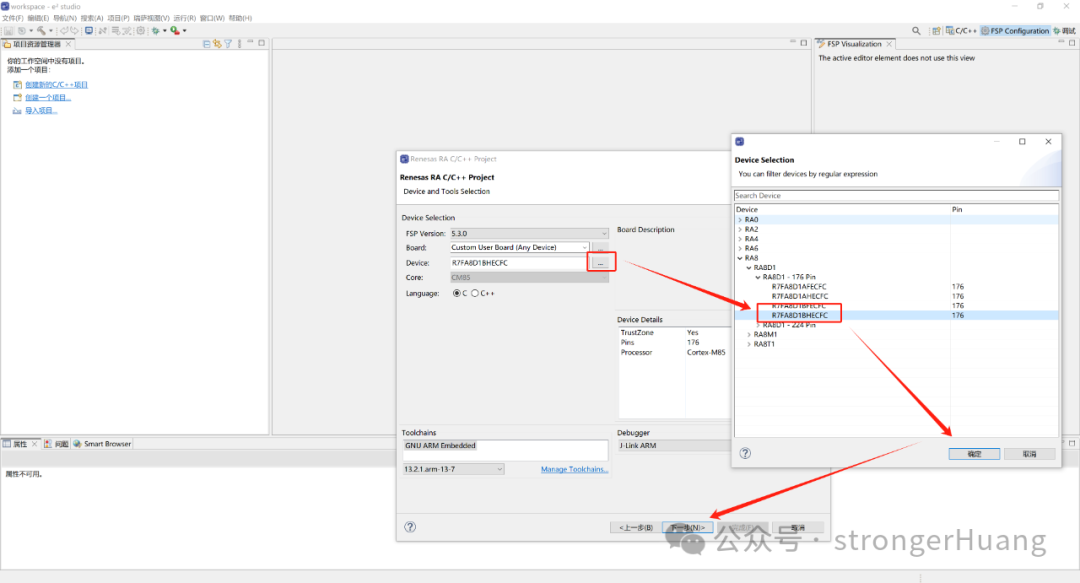 ?
?
 ?
?
?
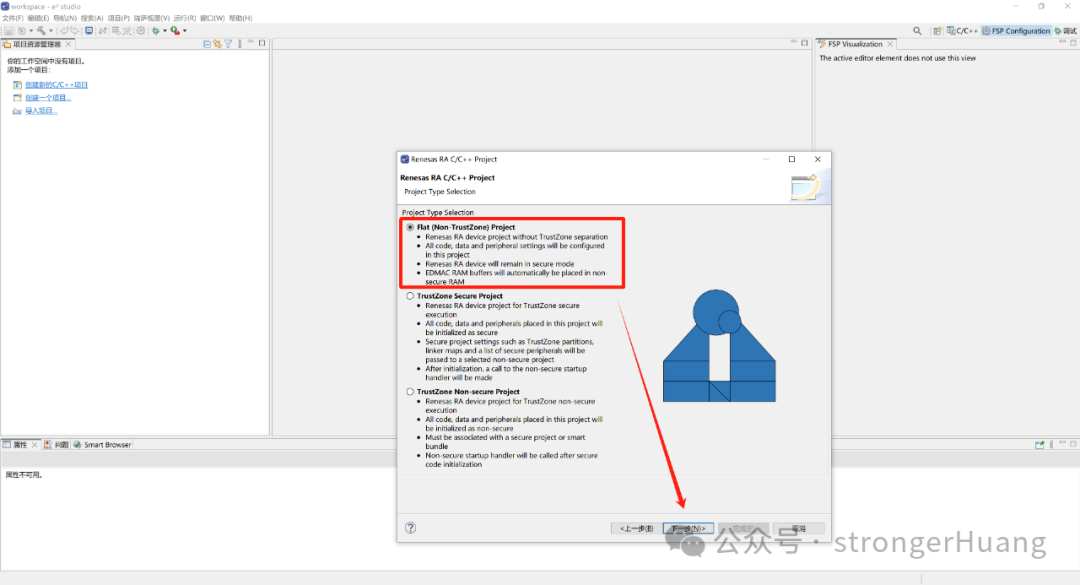
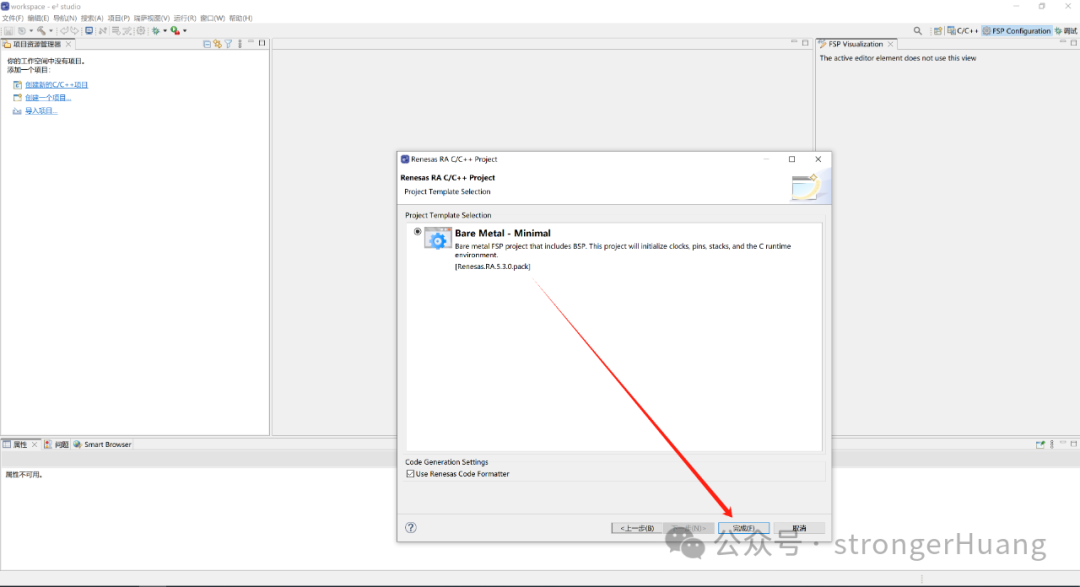
?基本上只需要動動鼠標“點一點”,一個完整的工程就創建好了。
2
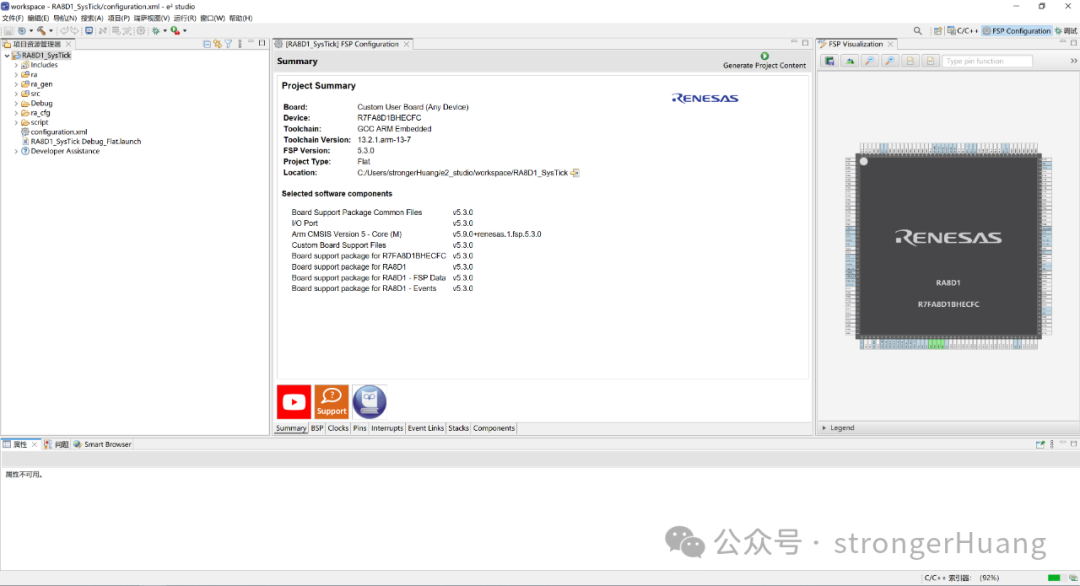
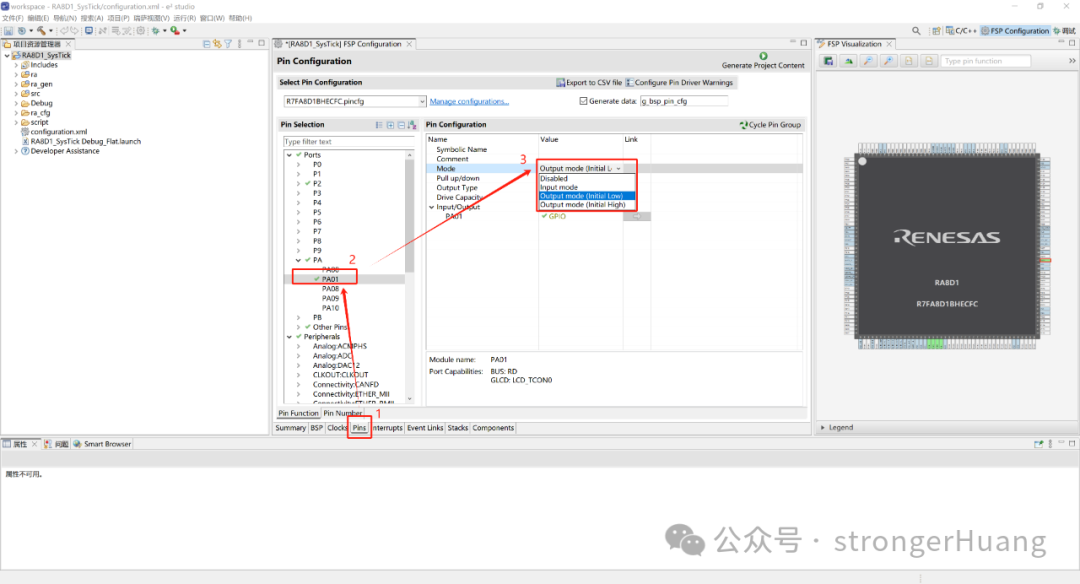
配置工程
這里配置一些基礎的信息,我們使用一個IO(PA01)來測試一下SysTick延時時間。
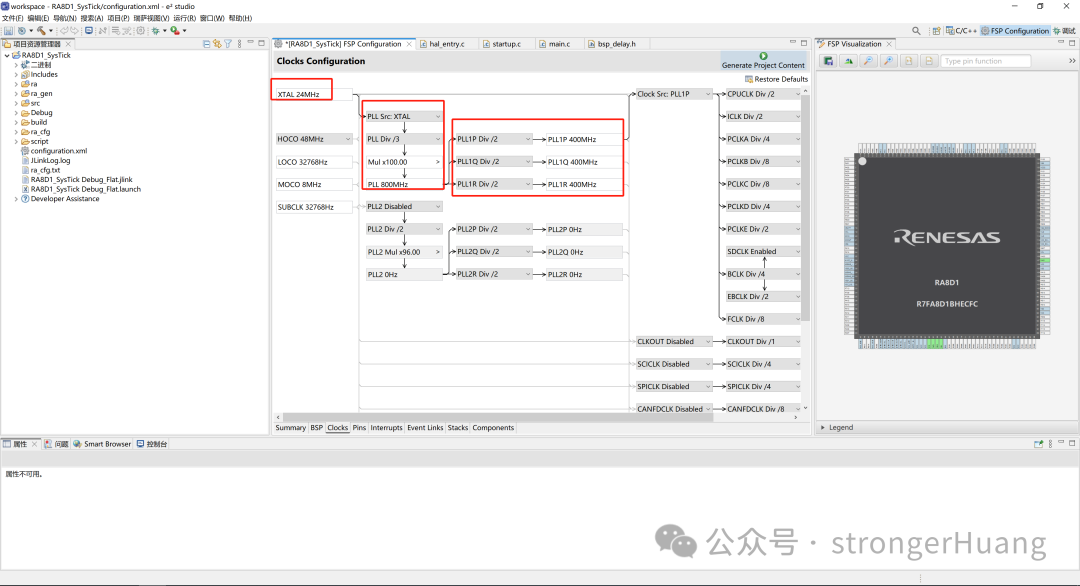
配置時鐘樹:
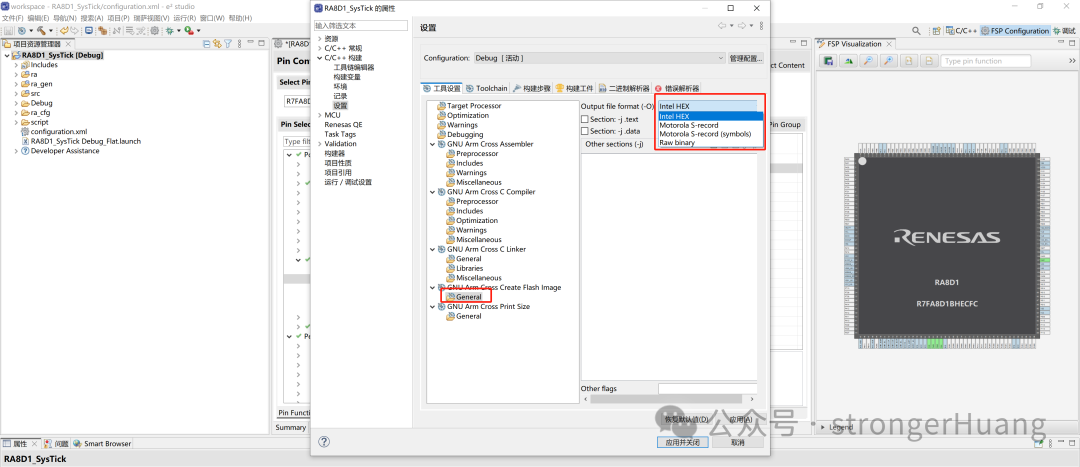
 配置輸出Hex文件:
配置輸出Hex文件: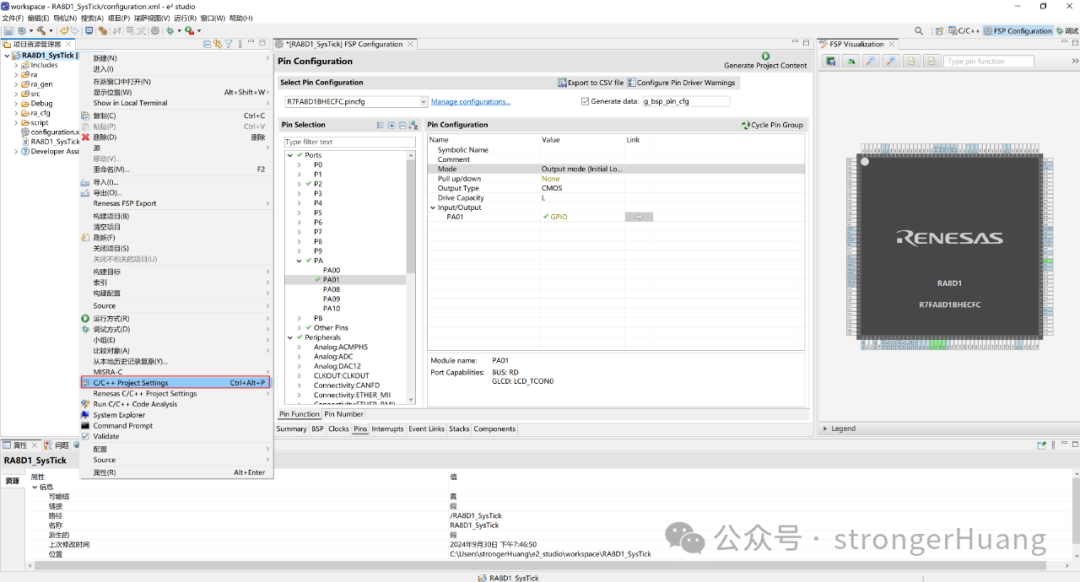
 ?
?3
演示
這里只是簡單演示Demo,我們添加一個IO翻轉來測試SysTick延時時間。
while(1)
{
R_PORT10->PODR^=1<<(BSP_IO_PORT_10_PIN_01&0xFF); //PA01亮滅翻轉
R_BSP_SoftwareDelay(1,BSP_DELAY_UNITS_MILLISECONDS); //SysTick延時
}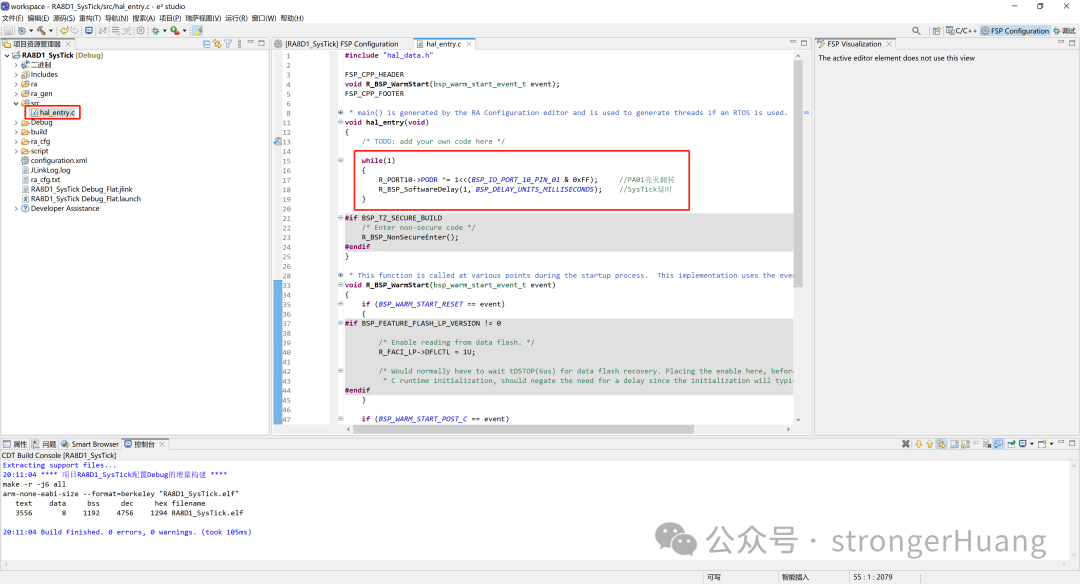 ?這個是1ms翻轉,SysTick延時誤差還是比較小,相對1ms來說誤差可以忽略(采樣頻率100KHz看不出來誤差)。
?這個是1ms翻轉,SysTick延時誤差還是比較小,相對1ms來說誤差可以忽略(采樣頻率100KHz看不出來誤差)。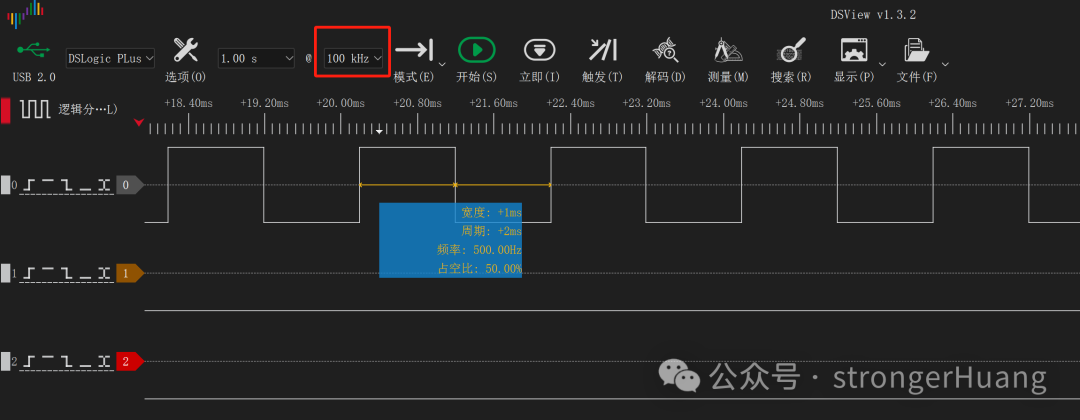 ?采樣頻率為100MHz,其實還是看得出來有點誤差。當然,這個誤差是晶振、軟件等多種因素影響的。還有,us級別的誤差,相對ms可以忽略。
?采樣頻率為100MHz,其實還是看得出來有點誤差。當然,這個誤差是晶振、軟件等多種因素影響的。還有,us級別的誤差,相對ms可以忽略。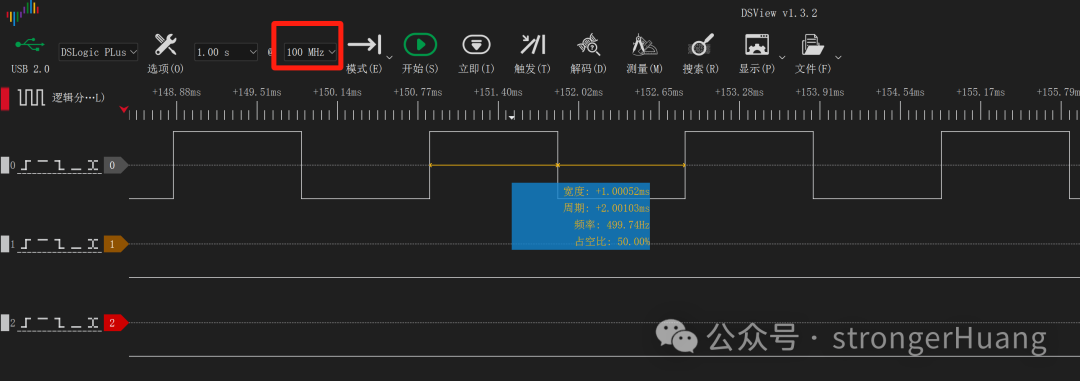
如果改為1us翻轉,通過IO翻轉來測試,誤差就相對明顯一點。
4
源碼描述
有經驗的工程師應該都能看懂,這里針對初學者簡單說下。
R_PORT10->PODR ^=1<<(BSP_IO_PORT_10_PIN_01 &?0xFF);R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_MILLISECONDS);typedefenum
{
BSP_DELAY_UNITS_SECONDS =1000000,///< Requested delay amount is in seconds
BSP_DELAY_UNITS_MILLISECONDS =1000, ///< Requested delay amount is in milliseconds
BSP_DELAY_UNITS_MICROSECONDS =1 ///< Requested delay amount is in microseconds
}bsp_delay_units_t;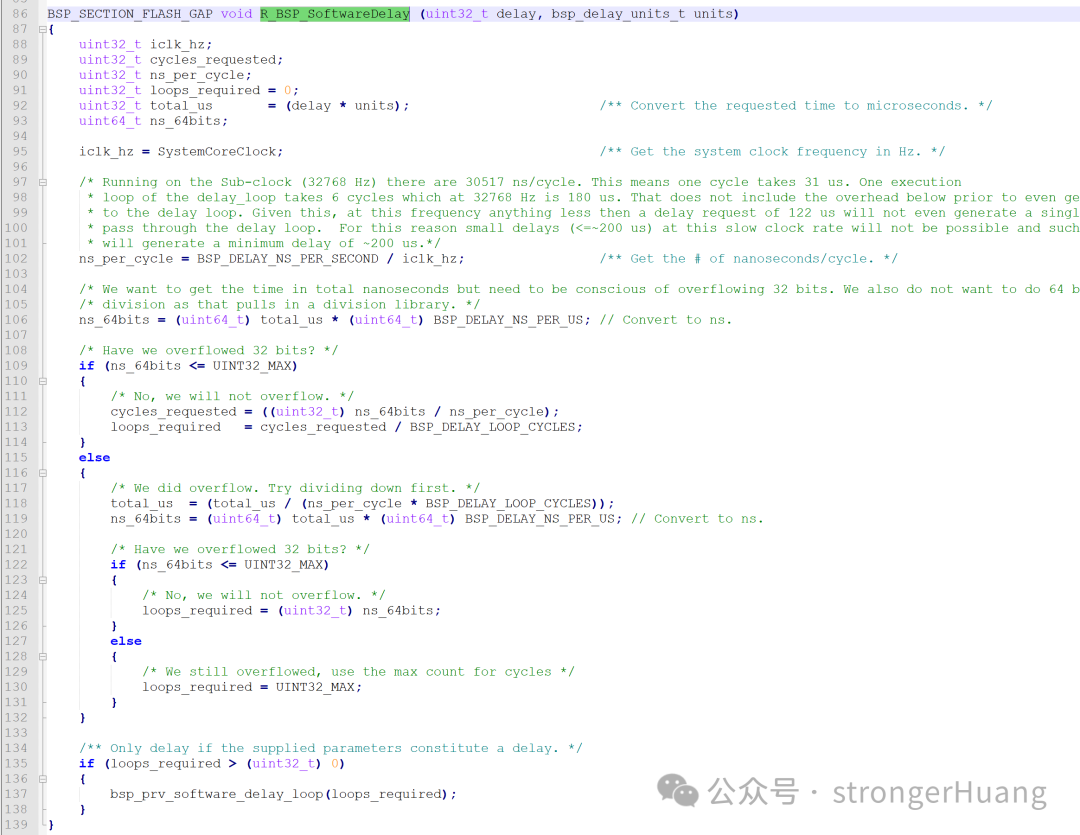 ?通過分析源碼,你會發現Cortex-M85內核的SysTick和Cortex-M3的向下兼容,常用的接口也一樣。
最后,單片機內核的SysTick是不是很簡單,希望通過本文的描述,對你了解SysTick有所幫助。
?通過分析源碼,你會發現Cortex-M85內核的SysTick和Cortex-M3的向下兼容,常用的接口也一樣。
最后,單片機內核的SysTick是不是很簡單,希望通過本文的描述,對你了解SysTick有所幫助。
-
單片機
+關注
關注
6052文章
44748瀏覽量
642494 -
瑞薩
+關注
關注
36文章
22333瀏覽量
87324 -
RA8
+關注
關注
0文章
8瀏覽量
6668 -
Systick
+關注
關注
0文章
63瀏覽量
13314
原文標題:瑞薩RA8系列教程 | RA8單片機SysTick使用描述
文章出處:【微信號:瑞薩MCU小百科,微信公眾號:瑞薩MCU小百科】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于瑞薩RA8單片機的智能小車項目方案 附源代碼


瑞薩RA8快速上手指南:Cortex-M85內核瑞薩RA8開發環境搭建 并點亮一個LED

瑞薩Cortext-M85內核RA8系列單片機的串口輸出實現方法


IAR為瑞薩RA8系列MCU開發提供支持
新品發布 | 瑞薩推出面向圖形顯示應用和語音/視覺多模態AI應用的全新RA8 MCU產品群
瑞薩電子宣布推出RA8D1微控制器(MCU)產品群



AMEYA360 | 皇華:瑞薩面向電機控制應用推出性能卓越的RA8 MCU

瑞薩電子全新RA8系列MCU產品介紹

瑞薩電子RA8E1和RA8E2 MCU新品解讀






 工商網監
工商網監

評論