

谷歌SLAM算法Cartography的閉環(huán)演示
目前,無人機(jī)大多依靠周圍環(huán)境地圖完成導(dǎo)航。地圖的繪制需要深度傳感器對周圍的實(shí)時(shí)環(huán)境進(jìn)行掃描,再以此為基礎(chǔ)創(chuàng)建3D模型。如此,無人機(jī)能夠知曉自己所在的位置,以及該如何前往目的地。這便是SLAM (即時(shí)定位與地圖構(gòu)建) 技術(shù)。
雖然,SLAM已在自動駕駛領(lǐng)域得到廣泛應(yīng)用,但這項(xiàng)技術(shù)依然存在局限性,即需要大量高保真數(shù)據(jù)以及處理數(shù)據(jù)所依賴的強(qiáng)大運(yùn)算能力。而高速飛行的無人機(jī),如果要在嚴(yán)格的時(shí)間限制之內(nèi)完成大量精確數(shù)據(jù)的收集和處理,便會對硬件和軟件提出更高的要求,從而令成本大幅增加。
針對這一問題,麻省理工學(xué)院計(jì)算機(jī)科學(xué)與人工智能實(shí)驗(yàn)室 (CSAIL) 推出了名為NanoMap的運(yùn)動規(guī)劃框架,用于高速飛行無人機(jī)的導(dǎo)航和避障。這一系統(tǒng)依然需要收集周圍環(huán)境的三維數(shù)據(jù),但并不會將所有信息整合成一張完整的地圖,而只需將信息存儲在一系列3D快照中。這樣一來,系統(tǒng)每秒需要處理的數(shù)據(jù)量得到有效減少,反應(yīng)速度便可以更快。
NanoMap的工作原理是這樣的 (如圖) ——
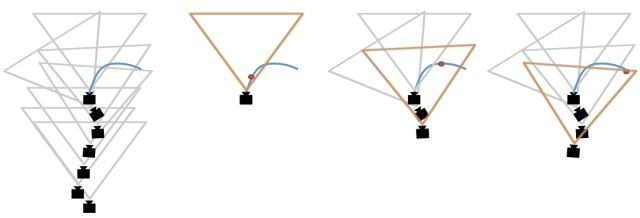
一系列3D快照反映出無人機(jī)的運(yùn)動軌跡, 如灰色三角形 (左一) ,而藍(lán)色曲線則表示人類為其設(shè)定的下一步運(yùn)動軌跡。如要達(dá)到預(yù)定軌跡中的紅點(diǎn) (左二/右二/右一) ,則需回溯之前的3D快照,直至找到包含目標(biāo)紅點(diǎn)的視圖。通過這一方式,系統(tǒng)可以判斷障礙物的位置并以此為無人機(jī)制定運(yùn)動規(guī)劃。
雖然,這一方案中系統(tǒng)需要處理的數(shù)據(jù)量與SLAM相比明顯降低,但其不足之處在于,需要回溯的3D快照越久遠(yuǎn),便越難以確定拍下快照時(shí)無人機(jī)所在的位置。
針對不確定度 (uncertainty) ,傳統(tǒng)的解決方案是讓同一參照物的多個(gè)視圖互相校準(zhǔn),從而繪制較為精確的周圍地圖。NanoMap則不同,依靠一系列3D快照進(jìn)行建模,得出每幅快照的不確定度,選出不確定度最小的快照,再將這一不確定度計(jì)入無人機(jī)的運(yùn)動規(guī)劃。不確定度設(shè)定越高,無人機(jī)便會越遠(yuǎn)離障礙物。
無人機(jī)的不確定度主要來自慣性測量單元 (IMU) 測量加速度的準(zhǔn)確度。如果加速度測量不夠準(zhǔn)確 (即相對位移不夠準(zhǔn)確) ,隨著時(shí)間的推移,位置判定則會越發(fā)不準(zhǔn)確,這一誤差稱為漂移 (drift) 。無人機(jī)飛行速度越快,漂移值也越大。因此,對高速飛行的無人機(jī)來說,盡管機(jī)身搭載有深度傳感器,計(jì)算不確定度仍然非常重要。
研究人員在測試過程中發(fā)現(xiàn),當(dāng)漂移值達(dá)到25cm/s,不確定度的建模開始發(fā)揮明顯作用。當(dāng)漂移值接近75cm/s,NanoMap做出的運(yùn)動規(guī)劃避障成功率超過97%。而當(dāng)漂移值達(dá)到1m/s,避障成功率為10%——而未計(jì)入不確定度時(shí),成功率僅有3%。
測試結(jié)果表明,NanoMap可以支持10m/s的高速飛行。這一方案在提升導(dǎo)航避障系統(tǒng)性能的同時(shí),又不會使小型無人機(jī)的計(jì)算設(shè)備負(fù)擔(dān)過重。不過,這一方案依然有一些不足——
CSAIL的科研人員Peter Florence說,在需要周圍環(huán)境高清地圖的場景下 (比如災(zāi)難搜救) ,NanoMap可能并非合適的選擇。另外,自動駕駛汽車制造商或許也更傾向于使用SLAM,因?yàn)槠嚤旧碓靸r(jià)高昂,導(dǎo)航系統(tǒng)的成本可能并不那么引人注意。即便NanoMap不像超人一樣全能,科學(xué)家們依然希望有一天,它能幫助無人機(jī)如蒼鷹一般矯健地穿過茂密的叢林。
安創(chuàng)空間
安創(chuàng)空間(ArmAccelerator)是Arm全球唯一加速器,聚焦于人工智能和物聯(lián)網(wǎng)產(chǎn)業(yè)的創(chuàng)新服務(wù)平臺。安創(chuàng)一直致力于幫助技術(shù)驅(qū)動型創(chuàng)新創(chuàng)業(yè)企業(yè)精準(zhǔn)對接生態(tài)資源、投資機(jī)構(gòu)、銷售渠道、宣傳渠道,提供一站式深度加速服務(wù);幫助資本市場對接最具投資潛力的創(chuàng)新團(tuán)隊(duì),挖掘早期優(yōu)質(zhì)項(xiàng)目;幫助大企業(yè)尋找所需要的創(chuàng)新型項(xiàng)目,加速項(xiàng)目落地,做真正的創(chuàng)新引擎;幫助國外先進(jìn)技術(shù)在國內(nèi)落地,以及國內(nèi)項(xiàng)目在國外渠道布局,注重國際合作與交流,推動全球創(chuàng)新。
原文標(biāo)題:科技漫談 | 高速飛行的無人機(jī),不用SLAM怎樣導(dǎo)航?
文章出處:【微信號:ARMaccelerator,微信公眾號:安創(chuàng)空間ARMaccelerator】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
無人機(jī)高速公路巡檢系統(tǒng):守護(hù)道路安全的空中管家
《手把手教你做星閃無人機(jī)—KaihongOS星閃無人機(jī)開發(fā)實(shí)戰(zhàn)》系列課程課件匯總
無人機(jī)傳感器線圈的設(shè)計(jì)與制造工藝詳解
精準(zhǔn)導(dǎo)航的關(guān)鍵:揭秘GNSS模擬器在無人機(jī)行業(yè)的核心作用
無人機(jī)飛行控制器的組成部件和工作原理

從姿態(tài)到飛行控制,IMU全方位守護(hù)無人機(jī)飛行

霍爾傳感器在無人機(jī)中的應(yīng)用







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論