

激光雷達(LiDAR)技術(shù)以其精準的距離測量和三維建模成像能力,在多個行業(yè)中發(fā)揮著重要作用。這項技術(shù)主要通過發(fā)射激光脈沖并測量這些脈沖與物體碰撞后返回的時間來工作,從而獲得高精度的空間數(shù)據(jù)。不僅能夠進行測距還能進行復(fù)雜場景的計算成像等等。
激光雷達技術(shù)已廣泛應(yīng)用于以下行業(yè):地理空間測繪、考古學(xué)、自動駕駛車輛、農(nóng)業(yè)、林業(yè)管理、城市規(guī)劃、災(zāi)害管理、建筑和建筑管理、交互式媒體和藝術(shù)、太陽能和風(fēng)能項目、軍事和國防、礦業(yè)和地質(zhì)學(xué)、基礎(chǔ)設(shè)施和建設(shè)、大氣研究、機器人技術(shù)、制造業(yè)、能源行業(yè)等等
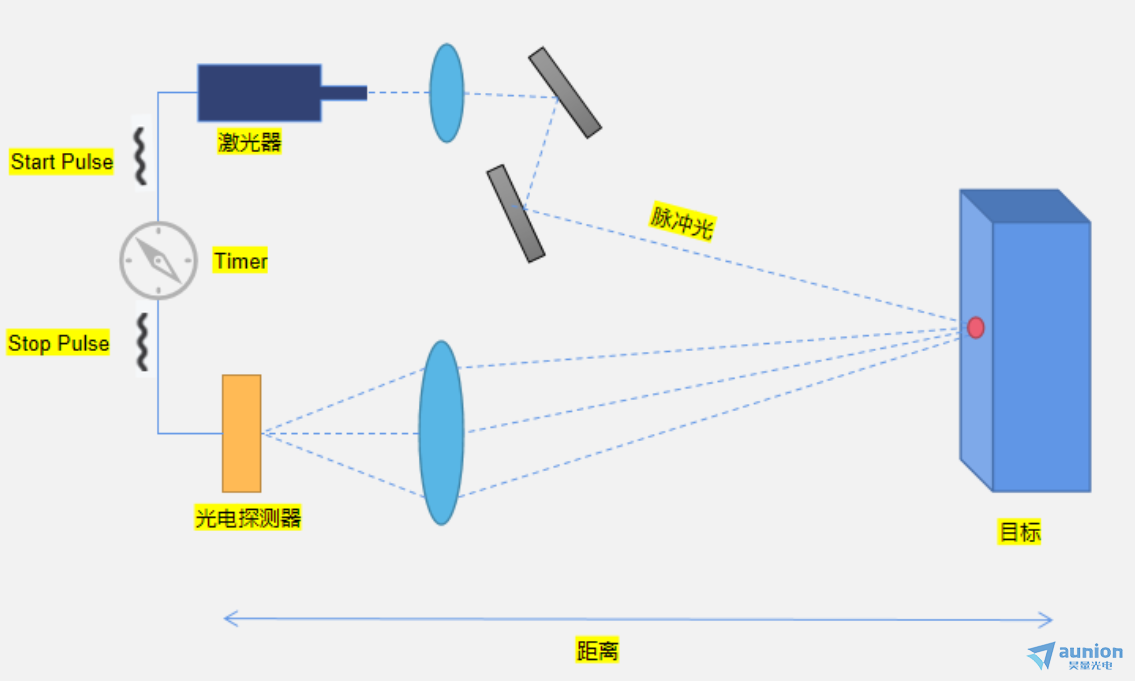
時間飛行(ToF)技術(shù)是一種測量物體距離的方法,它通過計算光波從發(fā)射到反射回傳感器所需的時間來確定空間信息。ToF系統(tǒng)通常包括發(fā)射器(激光光源)和接收器(探測器)及時間記錄裝置(tdc)
ToF有兩種,直接時間飛行(dToF)和間接時間飛行(iToF)
直接時間飛行(dToF):這種方式通過發(fā)射短脈沖光,并直接測量每個脈沖返回到傳感器的時間來測量空間信息。它使用高靈敏度的單光子雪崩二極管(SPAD)檢測單個光子,適用于構(gòu)建時間的直方圖,從而確定可能空間信息
間接時間飛行(iToF):這種方式則發(fā)射連續(xù)調(diào)制的光波,通過測量發(fā)射光與反射光之間的相位差來計算時間,從而確定空間。iToF通常使用標準的圖像傳感器架構(gòu)來測量隨時間變化的光強
相比而言,dToF除成本略高于iToF外,但其能提供更高的測量精度和較低的噪聲干擾,適合長距離和低照明條件下使用。
但是不管是dToF還iToF,其中SPAD的探測性能都會直接的關(guān)系到回波光子是否能夠被成功的捕獲到,從有足夠的數(shù)據(jù)支撐zui終結(jié)果的測算。
單光子雪崩二極管(SPAD)探測器是一種高靈敏度的光電探測器,能夠檢測到單個光子事件。它們在激光雷達(LiDAR)系統(tǒng)中的應(yīng)用顯著提高了距離測量和圖像捕捉的性能,尤其在要求高分辨率和高精確度的場合。
SPAD探測器通過利用雪崩效應(yīng)放大入射光子產(chǎn)生的光電流來實現(xiàn)單光子檢測。這種探測器在被觸發(fā)后會快速進入雪崩模式,可以檢測很低光級的信號。這一特性使得SPAD尤其適用于光線較暗的環(huán)境或需要很高靈敏度的應(yīng)用。這些特性,在激光雷達中起到著如下至關(guān)重要的作用
增強距離測量能力:在激光雷達系統(tǒng)中,距離的測量依賴于精確地檢測發(fā)射的激光脈沖被目標反射回來的時間。距離越遠,回波光子打到探測器的概率會越小,SPAD探測器的高靈敏度和高的光電轉(zhuǎn)換效率在遠距離測距時可以大大的提高捕獲珍貴的回波光子的能力
提高低光環(huán)境下的性能:由于SPAD探測器對單個光子都非常敏感,它可以在光線非常微弱的情況下工作,這對于夜間或光照條件不佳的環(huán)境中的激光雷達應(yīng)用尤為重要。
目前所用到的SPAD大多為單點式的,但隨著激光雷達方向的研究不斷深入,對于SPAD的要求也越來越高,單點SPAD的壁壘也越發(fā)明顯,如:
單點SPAD通常具有較小的探測面積,意味著其能夠捕獲反射回的光子數(shù)量有限,降低了系統(tǒng)的整體性能,
難以覆蓋較寬的視場角,這限制了激光雷達系統(tǒng)的應(yīng)用范圍,尤其是在需要廣泛監(jiān)控的場景中
在一些應(yīng)用中,可能需要將多個SPAD陣列集成在一起以增加探測面積,來提高信號集成,但這會增加系統(tǒng)的復(fù)雜度和成本以及體積。
SPAD需要一定的“死時間”來恢復(fù)到下一個光子可以被探測的狀態(tài)。在此期間,任何到達的光子都無法被檢測到(光子堆積效應(yīng)),這限制了其在高速應(yīng)用中的使用。
單點式的SPAD往往需要搭配一個時間相關(guān)單光子計數(shù)器(TDC)來使用,這就意味著會大大增加激光雷達系統(tǒng)的體積,但是激光雷達系統(tǒng)往往會伴隨著小型化的需求。
面日益增長的研究需求與設(shè)備性能上限的沖突,Pi Imaging與上海昊量光電推出了單光子陣列探測器—SPAD23。

SPAD23 設(shè)備采用了23個六邊形排列的硅基單光子雪崩二極管(SPAD),這種獨特的排列方式增加了有效探測面積,改善了傳統(tǒng)單點SPAD面積小的限制。并且突破了陣列探測器中絕大多數(shù)都無法突破的技術(shù)難題:填充因子。該設(shè)備的光敏面大小為1.3mm×1.3mm,每個像素的大小為23um,填充因子大于80%,單光子光電轉(zhuǎn)換效率為55%,對于探測面積、光的收集與捕獲能力及探測視場角相較于單點SPAD是指數(shù)級增長的。且其23個探測器獨立工作互不受彼此的死時間的影響,可以大大的少光子堆積效應(yīng)對實驗結(jié)果的影響。
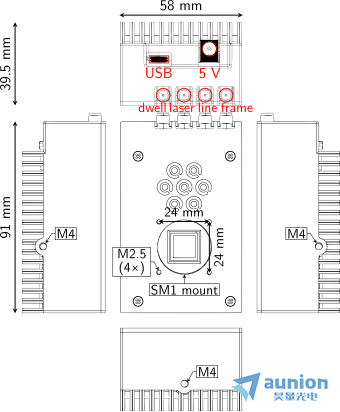
SPAD23的第二個亮點在于每一個探測器后面均連接一個10ps時間分辨率的TDC,這就意味著SPAD23的內(nèi)部內(nèi)置了23個SPAD探測器 + 23個TDC,僅需要自帶軟件即可一鍵獲得23個探測器的直方圖以及時間戳的信息,但是這種高度集成性并不會帶來額外的體積影響,相反為了響應(yīng)激光雷達研究小體積需求,其zui終體積僅有半個手機的大小,這遠比傳統(tǒng)形式的SPAD+多通道計數(shù)器的組合體積更小許多。
針對其實際表現(xiàn),搭建了一個簡易的激光測距光路來驗證設(shè)備本身的性能,該簡易光路的激光器使用的是40MHz重頻的532nm波長的激光器,將綠光打在白板上,陣列探測器與激光器的出光孔在同一水平線上如下圖所示:

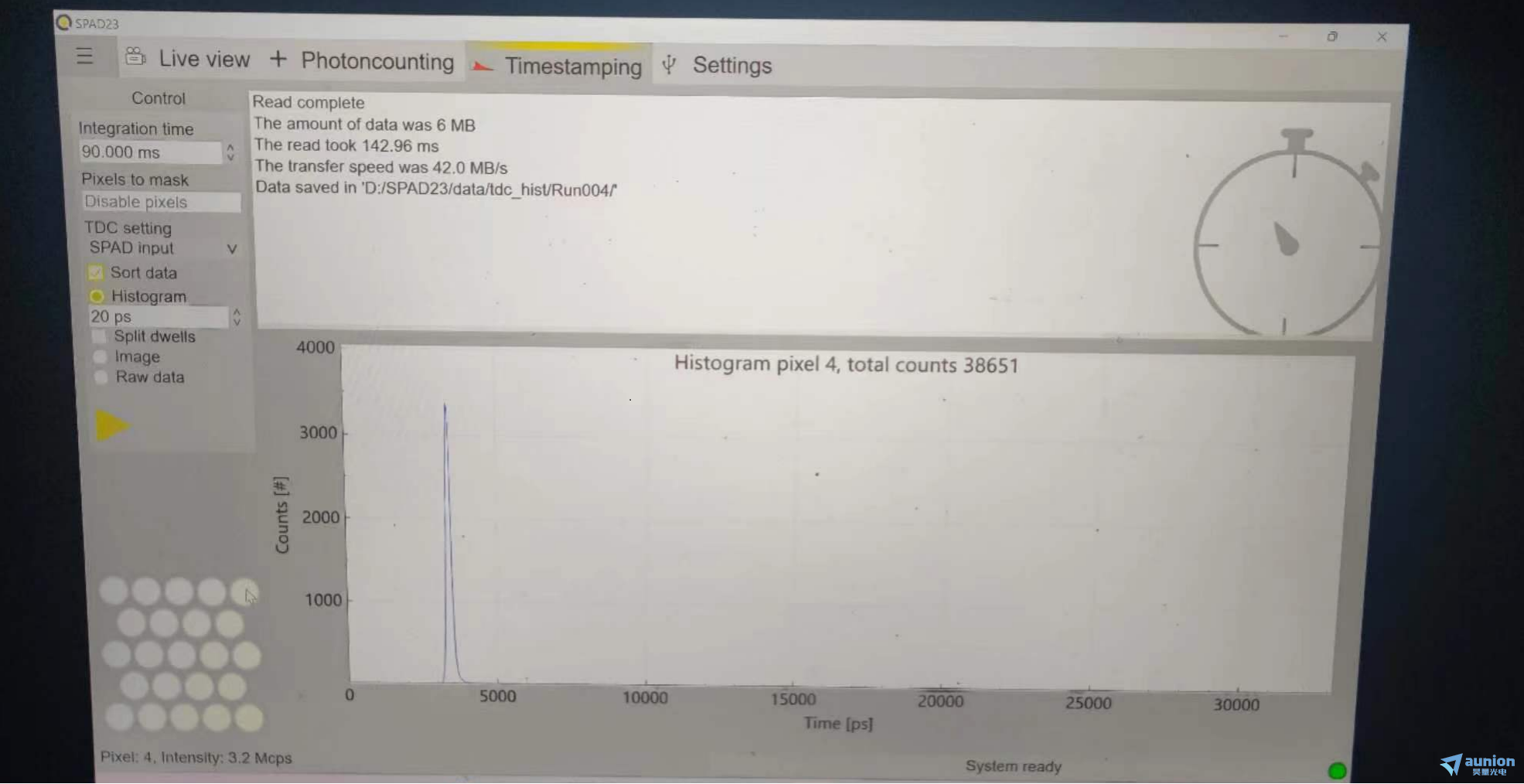
快速的搭建好實驗設(shè)備后,只需要給SPAD23通入電源及USB連接線,連接好激光器的同步觸發(fā)信號后,設(shè)置直方圖的Bin寬為20ps(短為10ps),探測時間為90ms,點擊開始按鈕后,瞬間生成直方圖,通過下圖的直方圖的圖表信息,光子的峰值在3100ps,粗略計算兩者之間的距離為0.93m÷2=0.465m,通過直方圖存儲的可視化數(shù)據(jù)精細計算,峰值所在的時間為第1590個Bin中,也就是3180ps,所以zui終距離為0.477m,這與實際量測結(jié)果相差無幾。
上述的簡易實驗,可以粗略的展示SPAD23的在激光雷達方向的應(yīng)用能力,憑借著其便攜性、易用性、大面陣、高速率等獨特的特性,已然成為激光雷達領(lǐng)域的新秀力量。
審核編輯 黃宇
-
激光雷達
+關(guān)注
關(guān)注
970文章
4150瀏覽量
191564
發(fā)布評論請先 登錄
相關(guān)推薦
CES 2025激光雷達觀察:“千線”激光雷達亮相,頭部廠商布局具身智能

激光雷達領(lǐng)域的新秀利器—SPAD23

禾賽拒絕“激光雷達無用論”

一則消息引爆激光雷達行業(yè)!特斯拉竟然在自研激光雷達?
科普:一文了解固態(tài)和半固態(tài)激光雷達
激光雷達,明年要降價至200美元

激光雷達會傷害眼睛嗎?

激光雷達的維護與故障排查技巧
激光雷達技術(shù)的基于深度學(xué)習(xí)的進步
如何提升激光雷達數(shù)據(jù)的精度
激光雷達技術(shù)的發(fā)展趨勢
光學(xué)雷達和激光雷達的區(qū)別是什么
激光雷達點云數(shù)據(jù)包含哪些信息
一文看懂激光雷達

基于FPGA的激光雷達控制板






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論