 人形機器人全景產業鏈大梳理!
人形機器人全景產業鏈大梳理!
特斯拉人形機器人進入量產前夕,有望給全球機器人市場帶來“鯰魚效應”。
近期,特斯拉CEO馬斯克公布了最新的人形機器人Optimus的產量規劃。
根據規劃,特斯拉將在2026年將人形機器人的產量提升至5萬到10萬臺,并在2027年進一步提高至100萬臺,實現連續兩年產量增長10倍的目標。
馬斯克表示:“如果進展順利,到明年(2026年)產量將增長10倍,目標是生產5萬到10萬臺人形機器人,之后的一年還將增長10倍。”
此外,在CES 2025(國際消費電子展)上,多家國內外廠商展示了人形機器人產品和技術。
英偉達攜14款人形機器人亮相,其中6款來自中國,包括智元遠征A2、星動紀元Star1、銀河通用G1、宇樹H1及小鵬Iron等。英偉達與包括波士頓動力、Figure AI、宇樹科技、小鵬汽車等在內的多家人形機器人公司達成合作,提供AI技術、仿真平臺和計算硬件支持。
國內方面,優必選、宇樹、傅立葉、智元、樂聚等人形機器人本體廠商加速引領產業進程;華為、小鵬、小米、廣汽集團等加碼布局人形機器人賽道,重量級玩家不斷增多加速產業發展。
特斯拉人形機器人是全球機器人行業風向標。隨著特斯拉人形機器人量產在即,國內產業鏈各環節有望加速迎來機遇。
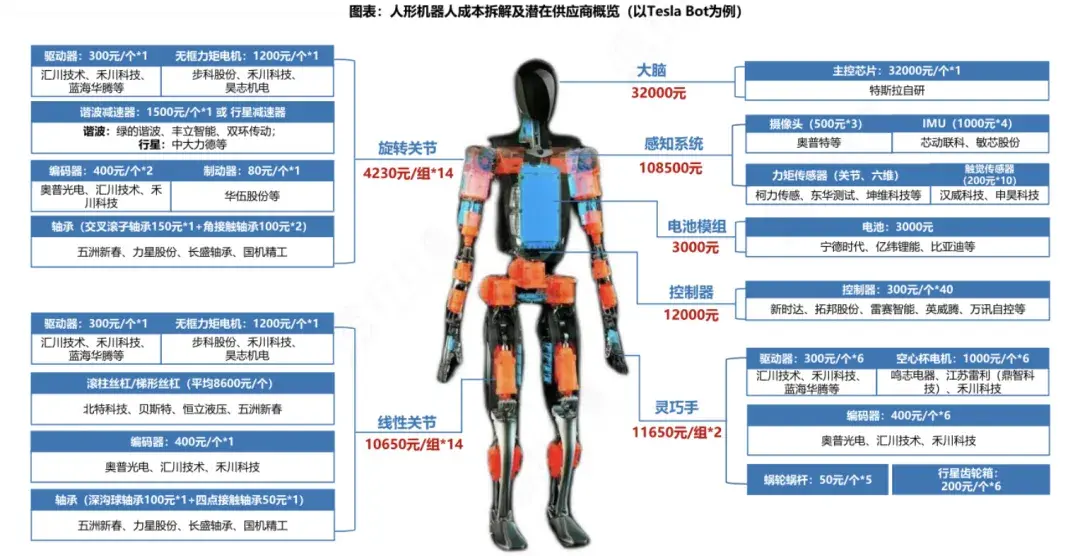
從人形機器人供應鏈來看,靈巧手、絲杠、減速器、傳感器、電機、控制器等都是值得重點關注的高價值環節,本文將對各大核細分環節進行逐一拆解。
資料來源:特斯拉AI Day,Vehicle,中航證券、行行查
01
人形機器人關節
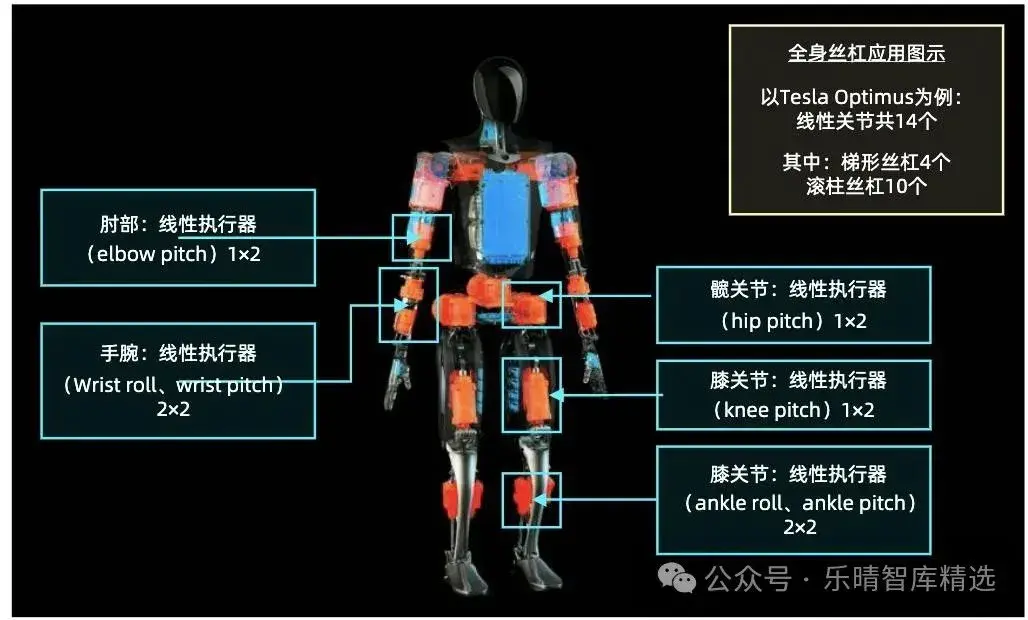
特斯拉人形機器人Optimus全身擁有28個自由度,上肢采用旋轉關節方案,下肢采用線性關節執行器方案。
關節部分整體成本占比約55%,主要包括旋轉關節、直線關節以及靈巧手。
1、旋轉關節
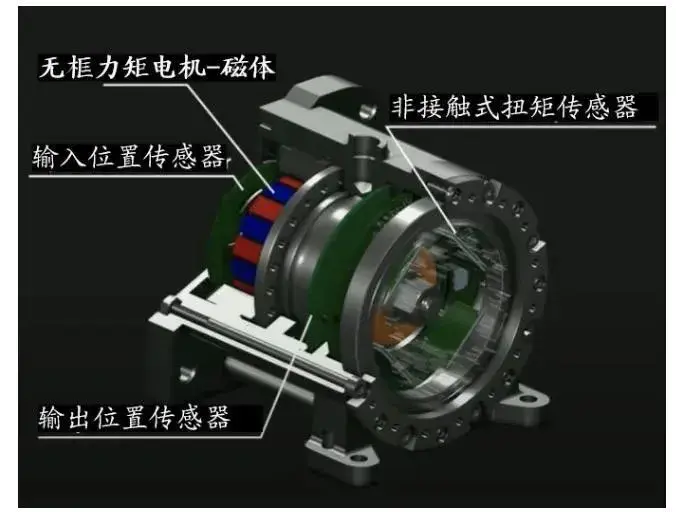
旋轉關節主要包括驅動器、無框力矩電機、諧波減速器、編碼器、機械離合器、軸承等,14個旋轉關節合計占比約14.1%。
無框力矩電機
在特斯拉人形機器人14個線性執行器和14個旋轉執行器中都使用了無框力矩電機。
無框力矩電機作為人形機器人的核心零部件,能夠實現極高的控制精度,用于人形機器人線性關節和旋轉關節。
無框力矩電機是力矩電機的一種,以輸出扭矩的的大小為性能指標,通常可以被看成極對數很多的無刷、永磁、直驅伺服電機。
國產人形機器人本體廠商如宇樹H1、遠征A1、小米Cyberone、優必選X1、傅里葉GR-1,關節單元也都使用無框力矩電機,最大扭矩為360Nm。
旋轉關節中的無框力矩電機:
無框力矩電機目前存在較高的技術壁壘,全球市場呈頭部集中的格局。
主要制造商包括科爾摩根(美國)、威騰斯坦(德國)、尼得科(日本)、派克漢尼汾(美國)、MAXONMOTOR(瑞士)等。
科爾摩根是全球最早研發出無框電機的企業,具備高端產品核心生產技術,KBM系列無框電機為公司明星產品。
國內無框電機行業玩家少,集中度較高,頭部企業占據市場主導地位。
根據公開信息顯示,國內無框電機主要參與者包括步科股份、昊志機電、偉創電氣、禾川科技等。
此外,無框力矩電機的性能在很大程度上取決于其電機結構和編碼器。
編碼器影響電機運動控制功能,高端產品主依賴進口重要元件芯片、碼盤的制作工藝難度較大,是國產化的主要壁壘。
市場格局方面,編碼器市場長期被海外企業占據,例如海德漢、多摩川、雷尼紹等。
我國本土領先供應商包括禹衡光學(奧普光電)、長春匯通(匯川技術)、宜科電子,蘇州捷之碩等,其中禹衡光學在國內處于領先地位、技術水平能夠和外資競爭,市占率約7.7%。
整體來看,目前我國無框電機行業尚處于起步階段,市場參與者數量較少,國產替代空間廣闊。
諧波減速器
減速器是人形機器人用量價值較大的零部件,成本占比高達35%。
在人形機器人的關節部位,如肘關節、腕關節等,減速器被廣泛應用以實現精確的傳動和控制。
諧波減速器因其體積小、重量輕、傳動比大等特點,常被用于這些需要精細操作的部位。
諧波減速器是靠波發生器使柔輪產生可控的彈性變形波,通過與剛輪的相互作用,實現運動和 動力傳遞的傳動裝置。
特斯拉Optimus人形機器人主要采用的是諧波減速器和行星減速器,全身 14 個旋轉關節均采用諧波減速器,手部 12個自由度采用行星齒輪箱。
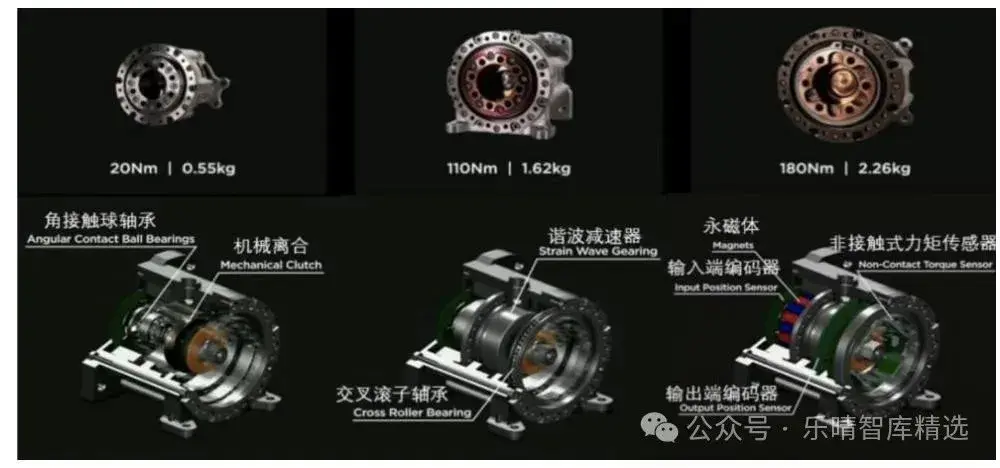
特斯拉 Optimus 機器人減速器方案:
諧波減速器全球市場格局方面,日系龍頭哈默納科壟斷諧波減速器市場,全球份額超 80%。
我國諧波減速器市場較為集中,前五大廠商出貨量占比超六成。綠的諧波引領國產替代,來福諧波、同川科技、大族精密等企業也加快市場布局。
伺服驅動器
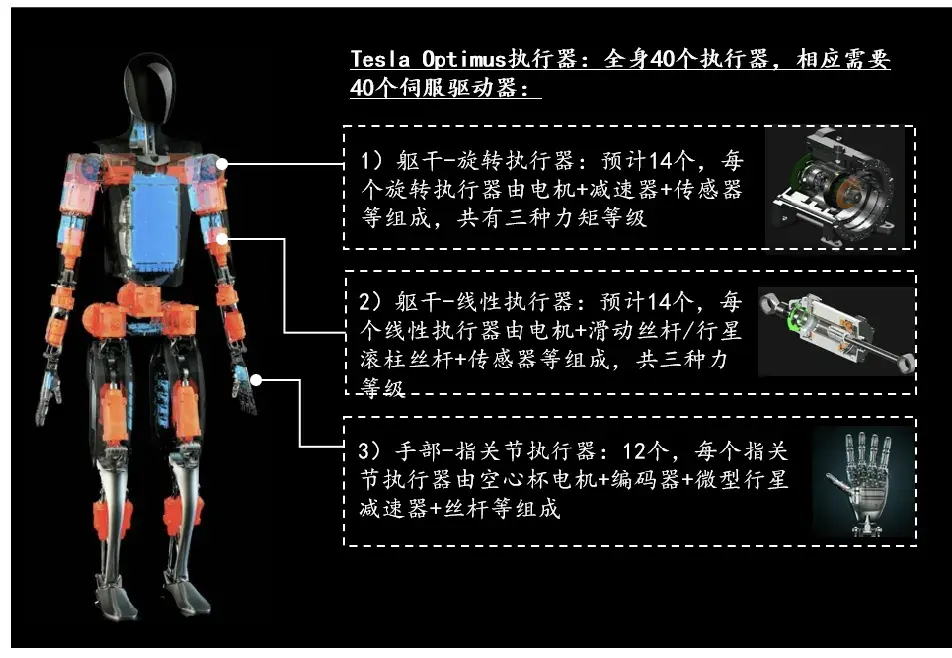
根據特斯拉 AI DAY 展示信息,特斯拉人 形機器人 Optimus 全身共 40 個關節執行器,均為電機驅動方案,因此 Optimus 至少需 要 40 個伺服驅動器,以確保機器人能夠靈活精準地完成各種復雜動作。
驅動方式來看,主要是基于主控系統→控制器→驅動→傳動→執行→傳感反饋的邏輯。
當前伺服驅動器也承擔部分運動控制功能,驅動和控制有集成化發展趨勢。
國內伺服驅動主要廠商包括匯川技術、禾川科技、雷賽智能、埃斯頓、藍海華騰、鳴志電器等。
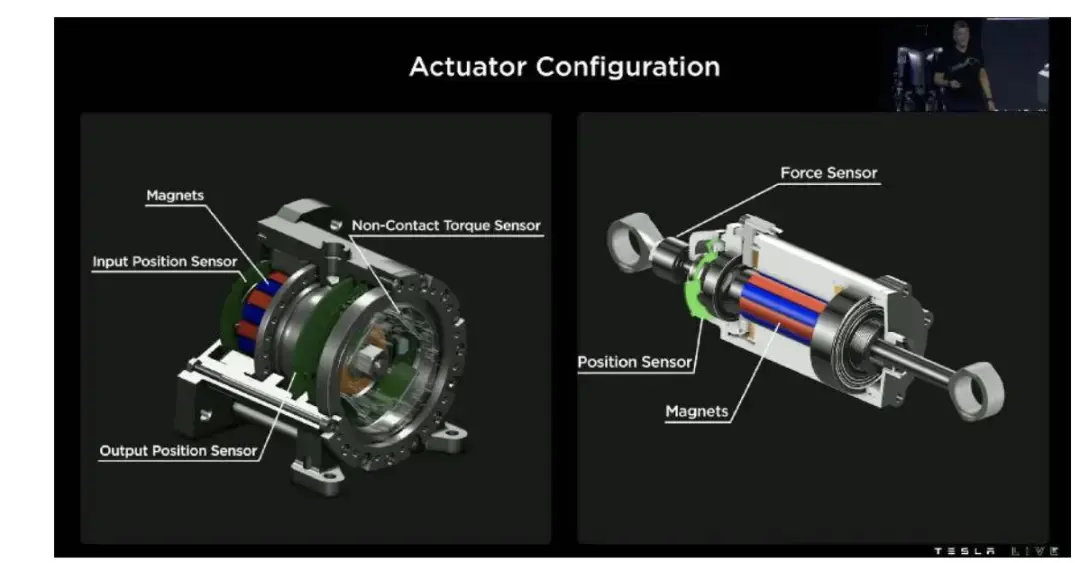
特斯拉關節執行器分布:
軸承
人形機器人需要的軸承種類多且數量大。
軸承主要應用于旋轉關節執行器關節連接(包括與減速器、電機等配合使用)的軸承包括角接觸軸承、交叉滾子軸承等;諧波減速器需要用到柔性軸承、滾針軸承等。
人形機器人靈巧手預計 使用 24 個滑動軸承、24 個球軸承和 36 個滾針軸承。
國內軸承環節主要布局廠商包括五洲新春、長盛軸承、力星股份和國機精工等。
2、直線關節
特斯拉人形機器人直線關節也包括上述旋轉環節中的驅動器、無框力矩電機、編碼器,新增的部分在于增加了行星滾柱絲杠/梯形絲杠,以及軸承主要是深溝球軸承和四點接觸軸承。
14個直線關節合計成本占比約35.4%。
絲杠
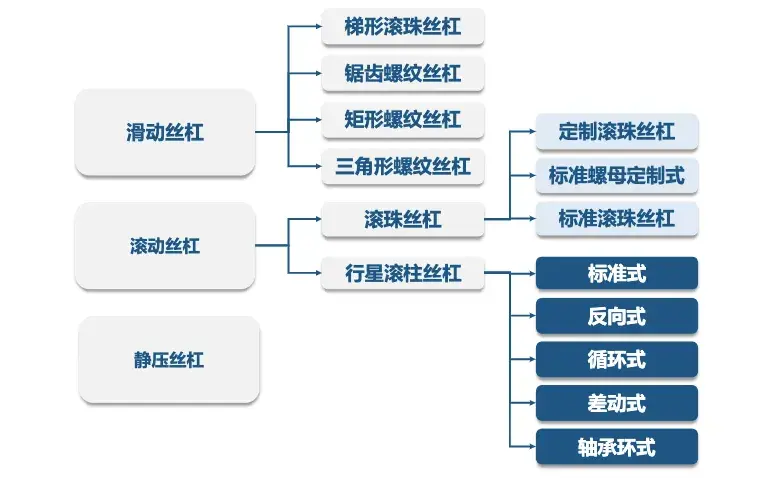
絲杠是將旋轉與直線運動互相轉化的傳動元件,按設計結構角度分為梯形絲杠、滾珠絲杠、行星滾柱絲杠。
根據特斯拉發布的相關資料顯示,特斯拉人形機器人直線關節總共選用14個行星滾柱絲杠。
行星滾柱絲杠是人形機器人零部件最高價值環節,成本占比約28.6%。以特斯拉Optimus為例,單個行星滾柱絲杠的單價約為1500元/個,單臺人形機器人中行星滾柱絲杠的總價值約在2.1萬元以上。
行星滾柱絲杠是一種新型精密滾動功能部件,具有尺寸小推力大和精度高等優點,是高承載、高轉速和復雜工況條件下執行機構的最優選擇。
絲杠主要分類:
從行星滾柱絲杠產業格局來看,海外具備先發優勢,國內企業正在加速實現國產替代。
瑞士GSA公司是全球第一大行星滾柱絲杠制造企業,在中國市場份額高達52%,占據國內市場主要份額。
特斯拉形機器人Optimus直線關節為反式行星滾柱絲杠,使用的是瑞士GSA制造的RGTI 12.8。
根據公開資料顯示,國內目前已布局行星滾柱絲杠的主要企業有北特科技、恒立液壓、貝斯特、雙林股份、五洲新春、新劍傳動、南京工藝、鼎智科技、KGG等。
整體來看,國內行星滾柱絲杠行業正處于成長期,未來國產技術突破帶來的技術降本有望形成對滾珠絲桿與梯形絲杠的向下替代邏輯。
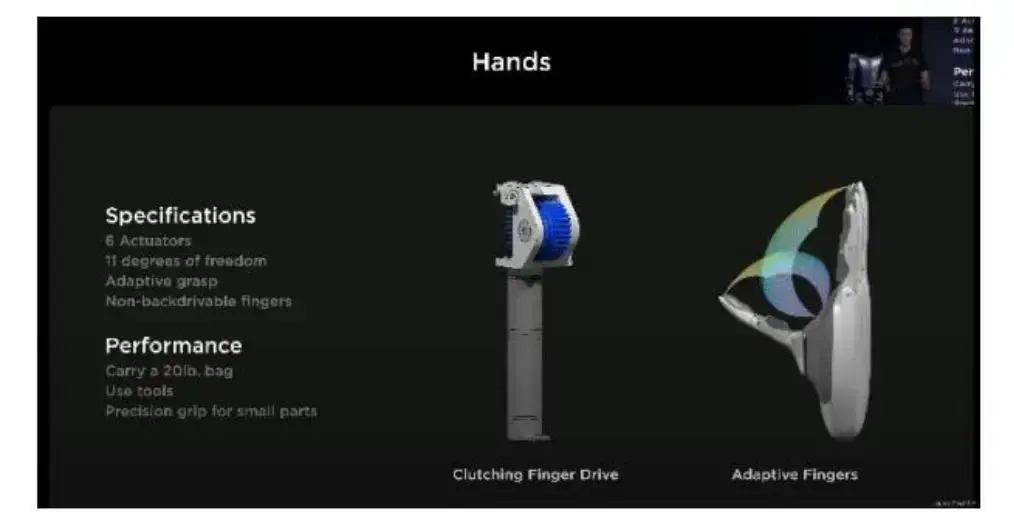
3、靈巧手
靈巧手主要包括驅動器、空心杯電機/無刷有齒槽電機、編碼器、精密行星減速器、行星齒輪箱、蝸輪蝸桿等,2個手部關節成本合計占比約5.5%。
空心杯電機/無刷有齒槽電機
人形機器人手部的手指關節需要較高的自由度,需配備體積小但能輸出功率高的電機,而空心杯電機匹配此要求。
空心杯電機作為人形機器人靈巧手末端執行器的核心零部件,是目前性能最優的電機方案之一。
特斯拉Optimus靈巧手采用6電機驅動,需要使用12個空心杯電機。
空心杯電機的主要組成部分包括空心杯繞組、轉子組件、傳感器組件、法蘭、軸承、磁軛等,核心技術壁壘包括線圈設計、繞線工藝以及繞線設備等。
國際頭部企業主要采用一次性繞制成型的生產技術,且掌握壁壘線圈繞組設計和加工、壁壘繞線設備技術等核心技術。其自動化程度較高,可加工0.08-0.2mm線徑、功率400W以下電機所需線圈。
國內主要采用卷繞式生產,依賴人工且生產線徑受限,當前一次成型繞線設備有待突破。
新進入者的技術積累較淺,難以達到人形機器人領域的高效率等要求。
全球市場格局方面,瑞士Maxon、德國Faulhaber、瑞士Portescap等處于行業第一梯隊,并已經大量申請空心杯電機相關的專利技術。
國內一些優秀廠商正在加速追趕和布局。以鳴志電器和鼎智科技產品為例,空心杯產品已應用于軍工、醫療、半導體等高端領域,且可以定制不同規格產品,并能以“編碼器+控制器+空心杯電機+精密齒輪箱”方案形式提供產品。
工控領域頭部廠商偉創電氣也切入到機器人空心杯電機領域;微傳動頭部企業兆威機電轉矩直流電機和無刷空心杯電機均已形成系列產品,兆威機電在CES 2025展會也上展出了其革命性產品靈巧手,采用并聯與線性電機技術,提供17-20個自由度,其6mm-16mm空心杯電機適用于多種機器人應用;此外拓邦股份和雷賽智能等廠商也加碼布局該領域。
精密行星減速器
行星減速器采用行星齒輪系統,能夠實現高效的減速效果。
精密行星減速器主要由太陽輪、行星輪、內齒圈三大核心部件構成,其主要的技術難點也在于三大部件的生產加工。
全球精密行星減速器供給格局相對分散,主要玩家包括日本新寶、紐卡特等國外巨頭,國內科峰智能、紐氏達特和威騰斯坦等廠商引領國產替代,中大力德、南方精工、江蘇雷利、豐立智能等廠商也有行星減速器技術布局。
02
感知系統
人形機器人感知系統包括攝像頭、IMU、關鍵力矩傳感器、六維力矩傳感器、觸覺傳感器等,合計成本占比約25.8%
傳感器使人形機器人通過觸覺、視覺和聽覺等感知方式與外部環境進行交互,還能使其感知自身的實時狀態。
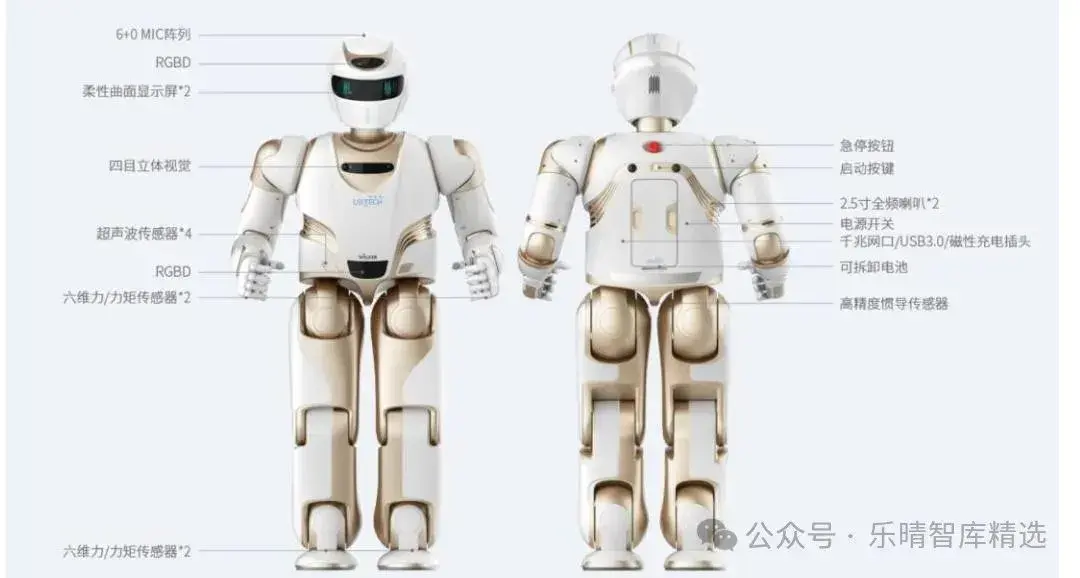
人形機器人傳感器應用位置:
觸覺傳感器應用于機器人的關節和柔性皮膚等領域。作為視覺傳感的重要補充,觸覺傳感器可以使機器人通過觸摸來感知物體的形狀和質地等物理特性,從而進行精確的抓取操作。
觸覺傳感器主要分為柔性、和剛性(MEMS為主)。其中,柔性觸覺傳感器具有更高的價值,壁壘主要在材料和制造兩方面。
觸覺傳感器目前處于發展早期,當前市場主要以Canatu、Sensel、Flexpoint等海外企業為主。柔性觸覺傳感器相關布局廠商包括漢威科技、申昊科技、帕西尼感知、柯力傳感、蘇試試驗、中科納芯、墨現科技、康斯特、力感科技和鈦深科技等。
機器視覺是人工智能最重要的前沿技術之一,其底層邏輯在于為機器植入“人眼與大腦”,使機器可代替人工來對被檢測物品做測量與判斷。
當前機器視覺向機器人視覺不斷進化。人形機器人視覺方案目前主要以結構光、雙目或多目RGB、TOF 等的組合方案為主。
優必選人形視覺方案:
全球機器視覺市場以美國康耐視和日本基恩士為代表的廠商占據全球超 50%的市場份額。
國內機器視覺行業整體的品牌競爭力有望持續提升。以海康威視、大恒科技、天準科技、凌云光為代表的中國本土機器視覺廠商已在核心零部件技術與獨立軟件算法等方面進行大力投入;奧比中光在中國服務機器人 3D 視覺傳感器領域市占率超過70%;奧普特擁有完整的機器視覺核心軟硬件產品。
此外,IMU能夠實時測量人形機器人在三維空間中的角速度和加速度,該領域主要布局廠商有敏芯股份和芯動聯科等。
力/力矩傳感器使機器人在執行操作時能夠自主調整其姿態,從而確保操作的穩定性和精確度。
根據傳感器的安裝位置,力控方式可分為末端力控和關節力控兩種。末端力控是在機械臂的末端安裝一維或六維力傳感器。
六維力傳感器是維度最高的力覺傳感器,能夠提供最高維度的力覺信息,并給出最為全面和精準的力覺數據。
六維力傳感器相關布局廠商包括宇立儀器、坤維科技、鑫精誠、藍點觸控、昊志機電、柯力傳感、東華測試、海伯森、瑞爾特等。
03
控制系統
控制器是機器人的大腦,主要負責發布和傳遞動作指令。
人形機器人采集并處理多種模態數據,執行機構復雜程度遠高于工業機器人,對控制器實時算力、集成度要求高。
目前人形機器人廠商多為自行采購上游零件,集成以實現對自家機器人的適配,控制算法和控制器的設計是機器人運動控制的核心和壁壘,可能會延續工業機器人廠商負責本體制造+控制器部分的產業鏈分工。
該環節國內主要參與廠商包括匯川技術、新時達、英威騰、雷賽智能、埃夫特、新松機器人、埃斯頓等。
從長期視角觀察,隨著特斯拉人形機器人量產進程加速,人形機器人產業趨勢較強后續有望大幅提升核心零部件的需求,從而進一步帶動國內廠商滲透率和市場份額提升。
本文重點關注人形機器人核心感知系統:機器視覺。
01
機器視覺行業概覽
機器視覺,是人形機器人感知和理解周圍環境的關鍵技術之一。
其本質是為機器植入“眼睛”,利用環境和物體對光的反射來獲取及感知信息。
未來的機器人也將和人類一樣,大量信息都將通過視覺感知獲取。

機器視覺的產業鏈中,上游主要有光源、鏡頭、工業相機、工控機、圖像處理軟件等機器視覺組件設備的提供商;產業中游包括基于視覺應用軟件的應用系統(檢測、測量、定位、識別系統等)以及各類視覺設備;產業鏈下游主要為各行業的產線綜合解決方案供應商終端行業。
機器視覺全景結構圖:
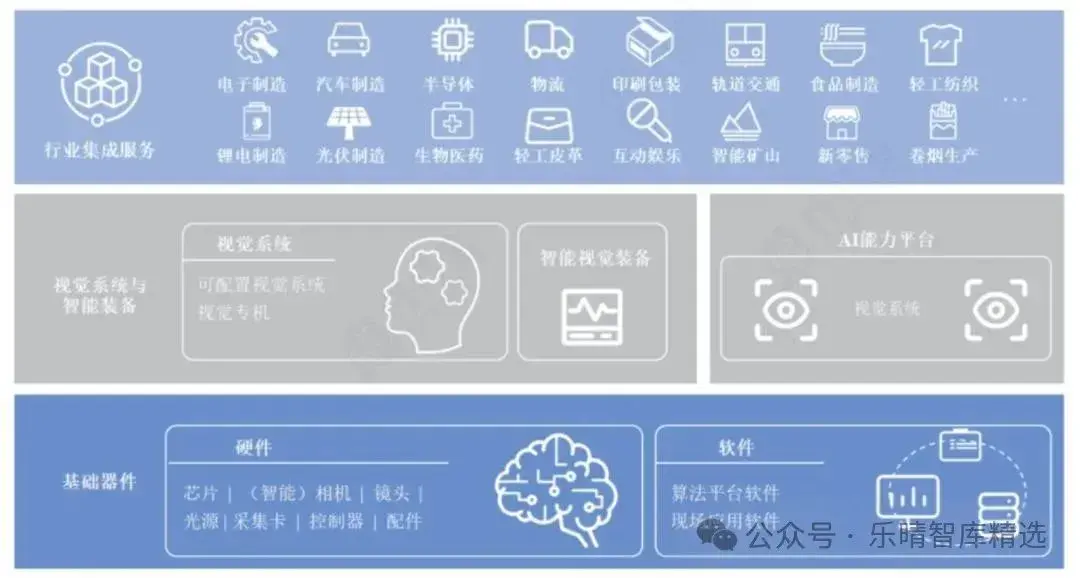
通常來講,一個完整的機器視覺系統包括硬件和軟件兩部分:
“視”,即系統的硬件組成部分,主要包括:光源、鏡頭、工業相機、圖像采集卡;
“覺”,即系統的視覺處理軟件,主要由圖像獲取、攝像機標定和獲取發送目標點的坐標三部分組成。
產業鏈上游的工業相機、圖像采集卡等核心零部件及算法軟件是整個機器視覺行業中價值量最高的部分。
工業相機:是機器視覺系統的核心部件,相當于人眼的視網膜,成本占比約 27%。據公開信息顯示,目前國內廠商奧普特、海康機器人(海康威視子公司)、大恒圖像和華睿科技(大華股份子公司)、埃科光電等廠商均已具備工業相機生產能力。
圖像采集卡:圖像采集卡是構建完整的機器視覺系統的重要部件,其功能是建立和前端相機中的連接,管理相機控制信號,從相機中獲取數據,并將其轉換成計算機能處理的信息。
我國機器視覺設備廠商使用的高速圖像采集卡主要依賴進口,國產化率較低。公開資料顯示,國內圖像采集卡和圖像處理器環節中包括大恒圖像、維視圖像、凌云光、埃科光電、北京君正、富瀚微等也在加速布局。
光源:光源的作用是照亮目標并突出可視化特征。與民用照明光源相比,機器視覺的光源在照度、均勻性和穩定性三個核心指標上有較高的要求。國內廠商中奧普特是市占率最大的企業,主要參與廠商還包括沃德普和緯朗光電、大族激光、義眾實業等。
3D視覺:作為機器人感知的前沿和核心手段,根據成像原理的不同,3D視覺感知技術主要包括飛行時間(ToF)法、結構光法等。
3D視覺感知行業經過數十年發展,由早期工業級向消費級拓展,當前產業鏈各環節國產進程不斷深入,奧比中光、海康威視、奧普特、凌云光等正在成為國產替代頭部廠商。
圖像處理軟件及算法平臺:機器視覺系統中,軟件以及系統是核心,能為整套方案帶來更高的產品溢價。國內軟件和算法環節代表廠商包括凌云光、深科達、商湯科技、虹軟科技和云從科技等率先入局。
機器視覺設備和集成:除了自主研發、生產標準化的機器視覺核心部件,機器視覺廠商也深度結合下游實際場景,以整體解決方案的模式提供成套系統。
全球機器視覺高端市場由海外品牌主導,基恩士、康耐視兩大巨頭合計全球市占率超60%。國內機器視覺設備環節主流供應商包括天準科技、凌云光、奧普特、矩子科技、精測電子、賽騰股份、奧比中光、勁拓股份、先導智能、瑞芯微等;系統集成商主要布局者有凌云光、精測電子、依圖科技、智泰科技、維視圖像、格林深瞳等。
02
人形機器人主要視覺方案
現有的人形機器人視覺感知系統結合多模態感知能力和AI算法,實現環境理解和安全避障等功能,有望提升多目視覺、激光雷達等3D視覺技術的需求。
當前人形機器人廠商大部分案例均使用3D視覺傳感器,各類型的深度相機被廣泛使用,部分廠商的方案同時搭配了激光雷達,如AgilityRobotics的 Digit、宇樹的 H1、智元的遠征 A1 等。
國外廠商波士頓Dynamics的Atlas采用RGB攝像頭+ToF深度相機。
國內大多廠商使用多傳感器融合方案實現環境感知。從各廠商發布的產品參數看,國內機器人廠商配置方案選擇3D攝像頭為主的RGB+Depth的深度方案,同時配上超聲波傳感、激光雷達、ToF傳感等進行輔助。
優必選采用RGBD+雙目相機;傅利葉GR-1采用深度相機;開普勒的先行者系類采用3D視覺+魚眼環視相機;小米的CyberOne配備了自研空間視覺模組+AI 交互相機。
特斯拉人形機器人Optimus的視覺傳感系統采用純視覺方案,結合多目立體視覺通過多攝像頭捕捉圖像信息以及先進視覺處理算法FSD,面部配備汽車同款 Autopilot 攝像頭,最遠監測距離可達 250 米。
特斯拉純視覺方案能夠精準感知深度、速度、加速度信息,與通常的激光雷達融合方案相比硬件成本顯著降低,而“算法+算力+數據”構筑了高競爭壁壘。
特斯拉Optimus視覺系統關鍵組成部分:
- 多目立體視覺:Optimus的視覺系統主要由多個攝像頭組成,分布在機器人的不同部位,以提供全方位的視覺感知能力。
- 視覺處理算法:特斯拉Optimus純視覺方案復用自動駕駛底層技術FSD技術,核心在于海量數據、自研芯片與算法訓練。通過神經網絡和深度學習算法,FSD技術使Optimus能夠實時分析攝像頭捕捉的畫面,識別物體、行人和交通標志等,并規劃出安全的行動路徑。
早在2023年9月,特斯拉發布的人形機器人進展視頻中顯示,Optimus僅使用視覺和關節位置編碼器就能準確判斷物體位置、排除干擾做出指令,“端到端”神經網絡本地運行,視覺輸入圖像后即可輸出指令,無需聯網或人工操作。因此,也可以說自動駕駛在機器人上復用邏輯能夠跑通。
當前隨著特斯拉人形機器人量產臨近,國內外廠商也積極加速入局,已經有眾多人形機器人廠商發布了產品樣機,領先廠家已經開始規模量產的規劃,人形機器人產業正形成從加速過渡到擴張期,產業鏈各細分環節有望迎來百花齊放。
人形機器人關鍵零部件全解析
當前人形機器人量產臨近,馬斯克此前提出特斯拉人形機器人將在2025年實現小規模量產,市場預期供應鏈定點將在小規模量產前完成。
國內方面本土人形機器人產業鏈進展加速,包括華為等眾多大廠將下一次人工智能機會鎖定具身智能方向;宇樹科技、智元科技、小鵬汽車等近期也不斷更新人形機器人進展,行業加速進入里程碑節點。
人形機器人量產有望全面帶動產業鏈上游核心零部件。
當前特斯拉Optimus硬件方案相對明確,全身包含28個執行器,分旋轉執行器和線性執行器2大類型6種規格。其中旋轉執行器采用“電機+精密減速器”結構,線性執行器采用“電機+滾柱絲杠結構”。
其中,減速器、傳感器、電機、絲杠等高價值量零部件環節在Optimus的成本中占比較高,是具有較高價值的環節,值得重點關注。
01 空心杯電機
人形機器人手部關節空間狹小,需要具備一定承載力,空心杯電機是實現靈巧手功能的關鍵。
空心杯電機屬于直流永磁的伺服電機,是一種微特電機(尺寸不超過40mm),具有突出的節能特性、靈敏方便的控制特性和穩定的運行特性,技術先進性十分明顯。
其最大的特點在于突破傳統電機的轉子結構,采用無鐵芯轉子。
無鐵芯的轉子結構能夠徹底消除鐵芯中存在的渦流,從而消除其帶來的電能損耗。
此外,電機的重量和轉動慣量大幅度降低,完美契合人形機器人對應手指關節輕量化、高精度等需求。
市場格局方面,海外的主要制造商包括瑞士MaxonMotor和德國Faulhaber等主導空心杯電機市場,國內企業正逐步突破量產壁壘。
空心杯電機的難點在于繞線工藝,目前國內許多廠商不具備自動繞線工藝。
根據公開資料顯示,國內廠商江蘇雷利具備自動繞線生產線,與鼎智科技合作共同研發繞線設備。江蘇雷利8mm有刷空心杯和10mm無刷空心杯已經自研完成,且16mm空心杯電機已批量生產,供貨于海外市場。部分線性傳動產品在人形機器人領域送樣并獲得客戶階段性認可,目前未形成大批量訂單。
鳴志電器在人形機器人應用領域專注于手掌模組及指模所用的控制電機模組的研發和制造,具備該類控制電機模組的核心研發與制造技術,目前已經向該領域頭部客戶提交了全套技術方案及樣機,供客戶作可靠性及實際應用的測試驗證。
拓邦股份在空心杯電機目前已接到行業內客戶需求;偉創電氣針對人形機器人市場自主研發了10mm直流無刷空心杯電機系統,空心杯電動機模組產品已取得小批量訂單。
根據特斯拉Optimus已公布的方案進行測算,Optimus每只靈巧手上都裝有6個由空心杯電機驅動的空心杯關節,為靈巧手提供多達11個自由度,使其能夠實現更加靈活的操作。
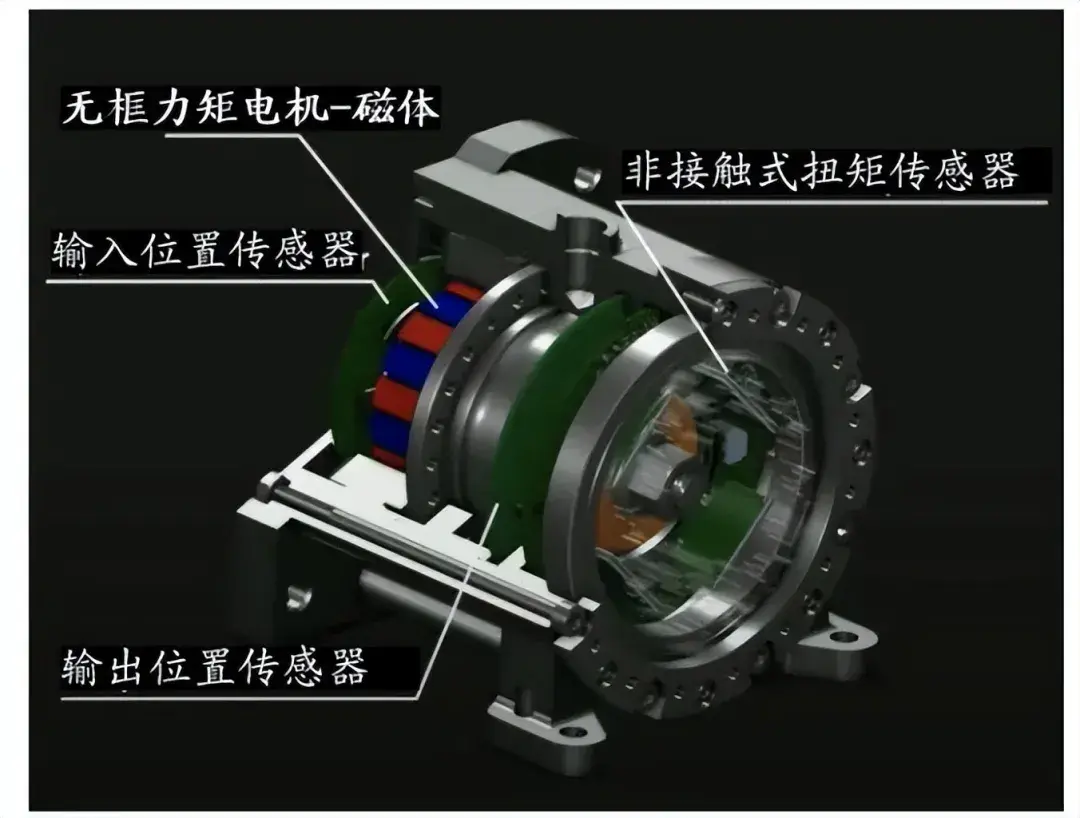
02 無框力矩電機
無框電機屬于伺服電機的一種,是驅動人形機器人執行器工作的動力來源。
無框電機消除了傳統電機的鐵芯,結構緊湊小巧,可實現更高的功率密度,具有低能耗和低摩擦的特點。
Optimus執行器中電機結構拆解:
高效無框電機是人形機器人廠家的核心護城河,行業目前存在較高的技術壁壘,廠家多以自研電機為主,重研發輕制造,量產售賣廠家少。
全球市場呈頭部集中的格局,無框力矩電機主要制造商包括科爾摩根(美國)、威騰斯坦(德國)、尼得科(日本)、派克漢尼汾(美國)、MAXONMOTOR(瑞士)等。
我國無框電機行業玩家少,集中度較高,頭部企業占據市場主導地位。
根據公開信息顯示,國內無框電機主要參與者包括步科股份、昊志機電、雷賽智能、偉創電氣、禾川科技等。
此外,無框力矩電機的性能在很大程度上取決于其電機結構和編碼器。
編碼器影響電機運動控制功能,高端產品主依賴進口重要元件芯片、碼盤的制作工藝難度較大,是國產化的主要壁壘。
市場格局方面,編碼器市場長期被海外企業占據,例如海德漢、多摩川、雷尼紹等。據MIR數據,2023年多摩川和海德漢兩家合計在我國市占率約42%。
我國本土領先供應商包括禹衡光學(奧普光電)、長春匯通(匯川技術)、宜科電子,蘇州捷之碩等,其中禹衡光學在國內處于領先地位、技術水平能夠和外資競爭,市占率約7.7%。
03 減速器
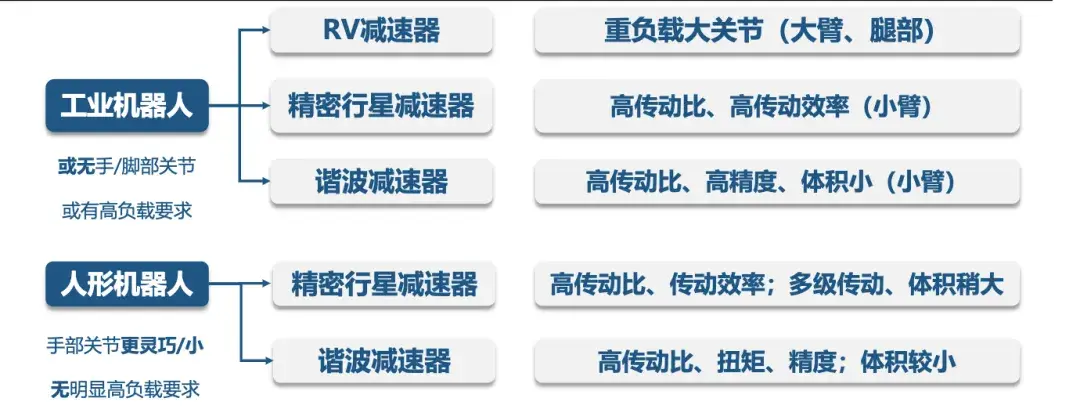
機器人領域使用的精密減速器包括RV減速器、諧波減速器、精密行星減速器、擺線針輪減速器、濾波減速器等。
人形機器人對減速器小型化和輕量化要求高,因此諧波和精密行星減速器最適配。

諧波減速器是旋轉執行器的核心部件,在機器人小臂、腕部、手部等部位具有較大優勢。
主要是由波發生器、柔輪、剛輪組成,其工作原理是利用波發生器使柔輪產生可控彈性變形,并與剛輪相嚙合來傳遞運動和動力的齒輪傳動。
其具有單極傳動比大、體積小、質量小、運動精度高并能在密閉空間和介質輻射的工況下正常工作的優點。
競爭格局方面,海外代表廠商為日本哈默納科、日本新寶,國內廠商綠的諧波率先打破國外壟斷引領國產替代。國內實力較強的諧波減速器企業還包括來福諧波、福德機器人、大族傳動、同川科技等。
精密行星減速器方面,國產高端精密行星減速器傳動精度、傳動效率、噪音等關鍵指標已達到國際先進水平,在部分領域實現了進口替代。
國內機器人廠商宇數科技-G1選擇自研一體化執行器(減速器選用行星減速器),手部、腰部均選用行星減速器,整體大約需要37個行星減速器;傅利葉智能-FourierGR1選擇自研一體化執行器(減速器選用行星減速器),單個靈巧手帶有6個自由度,腿部和手臂分別有超過5個自由度,整體大約需要32個行星減速器。
精密行星減速器供給格局相對更分散,全球主要是日本新寶、紐卡特等國外巨頭,國內科峰智能的市場份額約5%左右,中大力德、智同科技等也是精密行星減速器主要參與廠商。
此外,RV減速器有更高的剛性和扭矩承載能力,進而具有負載大、疲勞強度穩定、傳動比范圍大的特點。目前國內RV減速器生產規模較大的廠商主要有雙環傳動、中大力德、南通振康、秦川機床等,其中雙環傳動RV減速器市占率15.1%。
04 六維力傳感器
六維力傳感器是人形機器人傳感器中價值量最高的部分。
與單維力傳感器相比,多維力矩傳感器除了要解決對所測力分量敏感的單調性、一致性問題外,還需解決因結構加工和工藝誤差引起的維間干擾問題、動靜態標定問題以及矢量運算中的解耦算法和電路實現等,對設備和材料要求較高,研發制造難度遠高于單維力傳感器。
整體來看,六維力傳感器行業壁壘高,除了核心的技術復雜性和設備制造難度之外,還存在其他多方面的問題,如資金壓力、行業標準等,以及上游生產的技術要求和下游市場的渠道問題對行業發展的限制。
六維力傳感器當前市場規模較小,MIR 預測2026 年后有望出現爆發式增長。
特斯拉 Optimus 人形機器人中使用的傳感器:

目前已使用六維力傳感器的產品包括特斯拉Optimus、優必選WalkerX、達闥小紫XR-4等。
根據MIR數據,我國六維力傳感器市場集中度較高,國內廠商宇立儀器、藍點觸控、坤維科技、海伯森、鑫精誠等是行業主要參與者,柯力傳感、東華測試、昊志機電等近年來也在該領域加速布局。
05 柔性觸覺傳感器
觸覺傳感器在很大程度上取決于其是否具有柔性,因此柔性觸覺傳感器往往具有更高的價值。
柔性觸覺傳感器可以使機器人直接感知環境可使機器人直接感知環境。
特斯拉Optimus-Gen2靈巧手新方案共11個自由度,每根手指搭配觸覺傳感器,操作更加靈活,是相比上一代最大的邊際變化之一。
市場格局方面,目前柔性觸覺傳感器技術由國外企業領先,全球范圍內生產商主要包括Novasentis、Tekscan,Inc.等。國內柔性傳感器主要應用于消費電子領域,人形機器人領域的應用目前尚處于驗證和測試階段,尚未實現大規模應用,主要布局廠商包括漢威科技、帕西尼、申昊科技、墨現科技、鈦深科技等。
06 視覺傳感器
視覺傳感器作為人形機器人的“眼睛”,根據圖像信息獲取維度、處理數據類型的不同,可分為2D視覺與3D視覺。
2D視覺通過工業相機來獲取平面圖片,基于物體的平面特征進行分析,但無法獲取空間坐標信息。
3D視覺能夠采集視野內空間每個點位的三維坐標信息,通過算法獲取三維立體成像,并分析出目標在空間中的位置、形狀、體積、平面度等信息。
國內3D視覺感知行業由早期工業級向消費級拓展,產業鏈國產進程加速,領先布局企業包括奧比中光、海康威視、奧普特、凌云光、天準科技、矩子科技、中科慧眼等。
07 行星滾柱絲杠
絲杠是實現旋轉運動與直線運動相互轉化的傳動機構,常見絲杠品類包括梯形螺紋絲杠、滾珠絲杠和行星滾柱絲杠,性能逐一提升。
特斯拉Optimus機器人采用反向式行星滾柱絲杠方案,其具有結構緊湊、承載力大等優勢,可用于線性執行器實現關節傳動的精準控制,更好地幫助機器人執行復雜精細的任務。
行星滾柱絲杠主要由絲杠、滾柱、螺母、內齒圈、保持架和彈性擋圈組成,可以將絲杠旋轉運動轉變為螺母直線運動,主要用于人形機器人線性關節,可以提升腿部關節的扭矩密度。
行星滾柱絲杠有三大技術壁壘:原材料、工藝流程、生產設備。
全球代表性行星滾柱絲杠企業主要分布在德國、瑞士和瑞典,主要市場份額由Rollvis、GSA和Ewellix占據。
根據公開信息,目前已布局行星滾柱絲杠的主要企業有北特科技、恒立液壓、貝斯特、雙林股份、五洲新春、禾川科技、斯菱股份、新劍傳動、南京工藝、鼎智科技、KGG等。
當前隨著特斯拉人形機器人量產臨近,國內外廠商也極加速入局,已經有眾多人形機器人廠商發布了產品樣機,領先廠家已經開始規模量產的規劃,人形機器人產業正形成從加速過渡到擴張期,產業鏈各細分環節有望迎來百花齊放。
未來輕量化有望成為人形機器人核心的關注焦點之一。
特斯拉Optimus-Gen2二代人形機器人在不犧牲性能的情況下減重10公斤,主要依靠的是一種輕量化材料:PEEK材料。
PEEK材料在特斯拉人形機器人的關節、四肢、軀體和四肢骨架等部位都有廣泛應用,輕量化特性有助于降低人形機器人的整體重量,提高機器人的能效和靈活性,成為人形機器人“輕量化”的解決方案。
01
PEEK材料行業概覽
機器人常用的輕量化材料包括鎂合金、鋁合金、碳纖維復合材料、工程塑料等。
在當前“以塑代鋼”和“輕量化”的大背景下,PEEK材料作為一種高分子新材料,以其優異的性能用于在中高端領域逐步替換金屬材料的使用。
PEEK(聚醚醚酮)材料是金字塔尖的特種工程塑料,具有耐高溫、耐磨、耐腐蝕、自潤滑等特性,其絕緣性和耐化學性方面均優于普通金屬。密度約為鋁合金的一半,能夠實現輕量化,同時保持高強度和剛性。
這種材料的主要應用場景為航空航天、電子電氣、機器人、汽車、能源、醫療等多個領域。
其中,當前市場份額最大的領域是航空航天,未來人形機器人有望成為增速最快的應用方向之一。
02
PEEK材料在人形機器人中的應用
根據公開披露數據對比,特斯拉、優必選、智元等機器人平均重量約在58Kg。
其中齒輪和關節用1kg純PEEK材料,肢體中用8kgCF/PEEK,預計單臺機器人對PEEK消耗量為6.6kg。人形機器人靈巧手核心零部件解析
關節和四肢:
PEEK齒輪:應用于人形機器人的關節四肢等部位,提供穩定的傳動和支撐。
PEEK軸承:應用于人形機器人的關節等位置,具有優異的耐磨性和自潤滑性,能夠減少摩擦和磨損,提高機器人的使用壽命。
軀體和四肢骨架:
PEEK骨架:應用于人形機器人的軀體和四肢,相比金屬材料,PEEK骨架能夠減重40%,同時保持足夠的強度和剛性,滿足機器人的負載和靈活性需求。
03
PEEK材料產業鏈梳理
PEEK屬于合成樹脂,產業鏈上游是化學原料和化學纖維制造行業,原材料主要包括氟酮(最關鍵)、對苯二酚、二苯砜和碳酸鈉等,添加劑包含碳纖維、玻璃纖維和PTFE;中游包括PEEK顆粒、PEEK粉末、PEEK增強顆粒等PEEK產品制造;下游為各類終端領域。
PEEK材料產業鏈上游材料
PEEK的生產需要使用高純度的原材料,并對原材料進行嚴格的篩選和處理,以確保最終產品的質量。
產業鏈上游原材料整體成本占比較高,其中氟酮成本占比過半。
氟酮(DFBP)是合成PEEK的關鍵原材料,其純度和品質直接影響PEEK的產品質量。
氟酮合成工藝復雜價格高昂,每生產1噸PEEK需要消耗約0.7-0.8噸氟酮單體。
在全球范圍內除英國威格斯有部分自有產能以及印度有少許產能外,全球氟酮主要產能集中在我國的三家企業:新瀚新材,中欣氟材和營口興福。
根據公開資料,2023年國內主要氟酮由新瀚新材和營口興福供應,產能分別為4200和2000噸。
2023年中欣氟材和新瀚新材分別新增5000、2500噸氟酮進入試生產階段,2025年全國氟酮總產能有望達1.37萬噸。
此外,對苯二酚是PEEK聚合反應的主要原材料,占粗粉成本比例15%左右;碳酸鈉成本占比僅占1%,且為大宗化學品,由PEEK帶來的彈性較小。
該環節對進口產品不存在依賴,國內主流對苯二酚生產廠商包含南京華虹化工、南京新化原和上海棋成原力化工等公司。
碳纖維、玻璃纖維和PTFE占PEEK復合增強類產品成本約20%,占全部產品成本比例約5%。
玻璃纖維隨全球需求轉移至中國后,逐步實現國產替代,目前碳纖維需求也正在往中國轉移,吉林系、寶旌系、上海石化、中復神鷹、中簡科技、恒神股份和光威復材等廠商引領國產替代。
PEEK材料中游生產環節
PEEK材料市場中游生產進入門檻高,生產工藝復雜,工業化生產難度大,行業具有較高的壁壘,新進入者難以在短時間內與深耕行業的頭部企業抗衡。
PEEK的合成過程涉及復雜的化學反應和工藝步驟,需要高度的專業知識和技術實力。
國際廠商對其技術、配方、設備等相關知識產權和技術秘密的保護和封鎖十分嚴格,國內廠商完全需要自主研發。
在PEEK樹脂研發成功后的近50年中,全球范圍內僅有英國威格斯、比利時索爾維、德國贏創、中研股份(中國)4家產能達到千噸級的企業。
當前全球PEEK生產廠商呈現“一超多強”的競爭格局。
英國威格斯是全球最大的PEEK生產商,其次是比利時索爾維和德國贏創,三家企業的產能占比超過全球總產能的80%。
目前我國PEEK的研發集中在高校、科研院所和極少數企業之中。主要產能集中在中研股份、浙江鵬孚隆、吉大特塑料等公司。
當前國內企業在原料和設備方面具有成本優勢,國產PEEK市場售價顯著低于國際市場價格。
中研股份是全球第四大PEEK生產商,是繼英國威格斯、比利時索爾維和德國贏創之后全球第4家PEEK年產能達到千噸級的企業,也是目前PEEK年產能和產量最大的中國企業,現已超越英國威格斯成為中國市場銷量最大的公司,在國內市場引領進口替代。
當前下游多領域需求跟進,并朝著高端化、精細化方向發展,PEEK的需求量有望持續提升,國產產品售價下降也將帶動我國PEEK產品出口量增長。
近年來國內企業已突破海外技術封鎖,多個國產PEEK產品主要性能指標已達國際先進水平,且得益于較低的原料、人工等成本,高性價比優勢明顯,PEEK國產替代步伐有望加快。
根據公開信息和公司公告,國內PEEK產業鏈上下游各環節布局廠商還包括南京聚隆、華密新材、富恒新材、雙一科技、崇德科技、聚賽龍、同益股份、雙林股份、漢宇集團、沃特股份、金發集團、萬潤股份、南京首塑、君華特塑等。
隨著全球電子信息、汽車、航空航天產能持續向亞太地區轉移,我國PEEK材料市場增長迅猛。在政策扶持下人形機器人和低空經濟等新興領域對PEEK材料需求強勁,國內PEEK材料應用空間十分廣闊。
本文重點梳理人形機器人核心減速器三大環節:諧波減速器、行星減速器和RV減速器。
減速器行業概覽
減速器上游包括原材料供應,如銅材、鋼材等金屬材料,以及軸承、箱體等零部件和生產設備。
中游生產制造核心環節包含通用減速器、專用減速器和精密減速器等不同類型的減速器產品,這一核心環節匯聚了眾多專業減速器生產企業,如國內各環節頭部代表廠商綠的諧波、雙環傳動、中大力德等。
減速器主要分為三種類型:諧波減速器、行星減速器和RV減速器。

減速器在人形機器人的具體應用包括:
關節傳動:在人形機器人的關節部位,如肘關節、腕關節等,減速器被廣泛應用以實現精確的傳動和控制。例如,諧波減速器因其體積小、重量輕、傳動比大等特點,常被用于這些需要精細操作的部位。
集成應用:行星減速器等類型的減速器被集成于伺服電機、步進電機等執行機構中,以實現更緊湊、高效的傳動系統減速器制造整體是“系統工程”。
負載支撐:對于負載較大的關節部位,如腿部、腰部和肘部等,RV減速器因其較高的承載能力和穩定性而被廣泛采用。
整體來看,諧波方案傳動比大、體積小;行星方案體積小、壽命高;RV方案精度高、疲勞強度高。
人形機器人軀干執行器通常有旋轉執行器和線性執行器兩類,其中旋轉執行器的合作更為普遍,許多機器人本體甚至采用全旋轉執行器的方案。
特斯拉在AIDAY上展示了六種軀干執行器,其中旋轉執行器分別有20Nm/110Nm/180Nm三種力矩等級,對應小/中/大三種功率。

根據特斯拉、智元、宇樹、傅利葉、優必選的人形機器人減速器方案,各廠商基于不同減速器的特征、成本等因素的考量,采用不同的減速器方案。
以特斯拉-OptimusGen2為例,選擇旋轉關節均使用諧波減速器,靈巧手(單只)帶有6個自由度,腿部和手臂分別有超過5個自由度;整體大約需要14個諧波減速器。
優必選人形機器人主要采用諧波減速器,同時自研諧波+行星減速器;智元遠征A1機器人采用諧波一體關節,以及自研帶行星減速器的關節電機;宇樹自研自產G1的關節模組,共有3種類別,帶雙編碼器的行星減速器關節模組最大瞬時扭矩140Nm;傅利葉人形機器人采用諧波+行星減速器方案。
整體來看,在人形機器人精密減速器中,諧波減速器因優秀的性能成為首選,行星減速器則作為諧波減速器的有效補充方案在某些場景下得以應用。
01
諧波減速器
諧波減速器由波發生器、柔輪和剛輪三大零部件組成。
通過柔輪變形產生的周期性波動來實現剛輪輪齒與柔輪輪齒之間的少齒差內嚙合,從而完成運動與動力的傳遞。
柔輪:是諧波減速器核心部件,其外齒與鋼輪內齒不斷進行嚙入、嚙合、嚙出和脫開的往復循環。其采用40Cr合金鋼制造,例如40CrMoNiA、40CrA,目前柔輪材料大多依賴從國外進口。國內廠商方面,翔樓新材料精密冷軋和熱處理領域核心技術引領國產替代。目前其諧波減速器柔輪材料已經送樣給綠的諧波,是國內唯一一家通過綠的諧波產品檢驗并進入驗廠環節的柔輪材料供應商。
剛輪:多采用球墨鑄鐵制造,能夠提供良好的韌性、耐磨性。
波發生器:由柔性軸承與橢圓形凸輪組成,目前國內諧波減速器廠商已經開始加速軸承的國產化進程,以綠的諧波為例,其諧波減速器用軸承以自產為主,外購軸承主要為特定型號的深溝球軸承。
產業壁壘較方面來看,諧波減速器生產壁壘較高,技術、設備與人員均存在難點。
諧波傳動技術包括總體結構、柔輪、剛輪、凸輪、柔性軸承、交叉滾子軸承、齒形、波發生器等多個分支,從專利申請數量的角度來看,總體結構、波發生器等是諧波減速器技術的研發重點。
競爭格局方面,諧波減速器呈現寡頭壟斷高度集中的格局。
全球份額比國內市場更集中,日本哈默納科是諧波減速器全球和國內的最大供應商,在諧波減速器領域長期保持領先地位。
目前國產諧波減速器已基本可以實現國產替代,綠的諧波市場份額僅次于哈默納克并率先打破海外廠商壟斷局面。
綠的諧波產品圖示:

圖片來源:綠的諧波官網
國內同川科技也自主研發出具有完全自主知識產權的諧波減速器,并已實現批量生產。漢宇集團通過收購同川科技,涉足諧波減速器領域。
昊志機電在諧波減速器領域形成了完整的產品族譜,已經攻克了齒形設計、凸輪廓設計、齒輪表面處理等關鍵技術,建立了諧波減速器測試標準及檢測體系,其諧波減速器產品也包含波發生器這一關鍵部件。
來福諧波的產品線覆蓋全面,包括諧波減速器、關節模組及精密零部件三大板塊,其中波發生器作為諧波減速器的核心部件,也是來福諧波的重要產品之一。
大族激光旗下子公司杉川諧波擁有自主研發能力和先進的生產技術,已自研生產了多個系列的諧波減速器產品,包括HMCS、HMHD、HMHS、HMCD等四大系列,共200余款諧波減速器,產品在傳動效率和精度保持性和壽命等方面均達到了國際先進水平。
02
精密行星減速器
行星減速器具有高精度傳動的特點,其齒輪嚙合緊密,摩擦損失小,能夠減小齒輪系的傳動誤差,提高機器人的運動精度。
行星減速器常主要為人形機器人的關節提供動力支持。
例如,在機器人的腿部、髖部等關鍵部位,行星減速器能夠確保機器人在執行行走、跳躍等復雜動作時擁有足夠的動力和穩定性。
行星減速器的結構主要包括中心太陽輪、行星齒輪、內齒圈。
工作時中心太陽輪驅動內部受力旋轉,帶動行星齒輪在內齒圈軌道內進行旋轉,依賴齒輪之間的嚙合來實現轉速的減小,行星架作為輸出軸,將減速后的運動傳遞給負載。
行星減速器圖示:
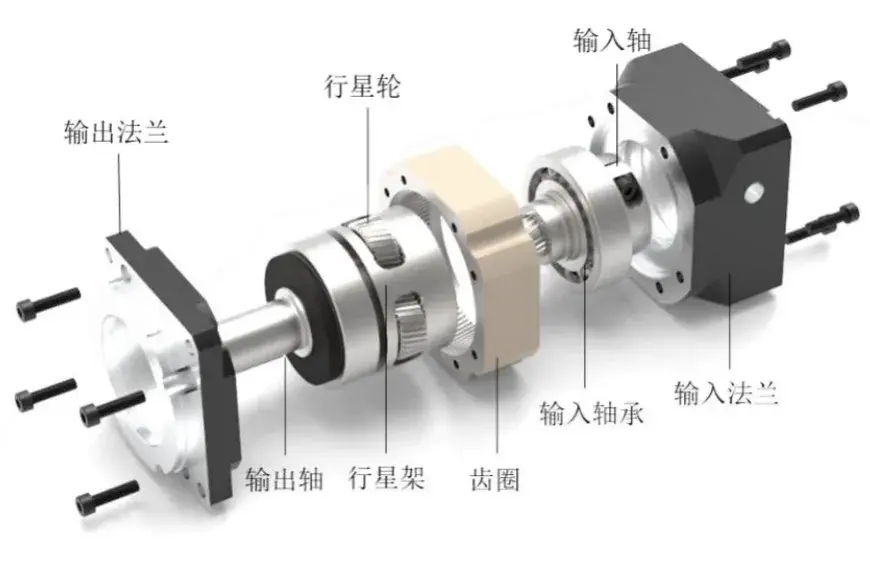
資料來源:科峰智能
精密行星減速器對生產過程的工藝及核心技術掌握及產品設計研發能力要求較高。
頭部廠商往往具備兩方面優勢并保證其市場地位:一是設計能力壁壘,包括模塊化、結構、強度、精度等方面的設計能力;二是工藝技術能力壁壘,新進入者的專職工藝技術人員經驗不足、人員欠缺。
國際領先的單級精密行星減速器的精度可在1′以內,保持高精度的穩定使用壽命達到2萬小時,且產品一致性較高。
精密行星減速器供給格局相對更分散,全球CR3接近40%左右。
相對諧波減速器,行星減速器市場技術門檻相對較低,各家行星減速器的可選尺寸范圍較大,從性能角度來看,國內廠商與海外廠商產品并無顯著差距。
由于市場競爭較為激烈,因此并沒有明顯的市場主導企業。
全球主要是日本新寶、紐卡特等國外巨頭,國內科峰智能市場份額約5%左右;三大龍頭日本新寶、科峰智能、紐氏達特整體份額可以占到45%左右,中大力德、精銳機電、寧波東力等廠商也在行星減速器領域有所布局。
03
RV 減速器
RV減速器結構和制造工藝復雜,相較于諧波減速器具有更高的技術和投資門檻。
盡管國內一些企業已經能夠批量生產RV減速器,但整體來在這一領域核心技術尚未完全掌握。
當前本土RV減速器品牌主要仍聚焦在本土機器人品牌的中低端和中低負載產品系列。
市場格局方面,國內RV減速器相對集中,兩大龍頭占據超過一半市場份額。
國產RV減速器已實現初步的國產替代,除雙環傳動外,珠海飛馬、智同科技、中大力德、南通振康、秦川機床、六環傳動等也是該領域具有實力的廠商。
目前我國超100家本土企業涉足精密減速器生產,企業數量逐漸增多,且技術和研發實力逐步提升。后續在主機廠降本訴求以及合作響應需求下,國產替代有望趨勢逐漸明晰。
從長期視角觀察,隨著特斯拉人形機器人量產在即,產業趨勢明確,后續有望大幅提升核心零部件的需求,從而進一步帶動國內廠商滲透率和市場份額提升。
本文重點關注人形機器人兩大核心電機:無框力矩電機和空心杯電機。
01
無框力矩電機行業概覽
人形機器人電機有三個關鍵點:高效率、高動態和高功率密度。
目前力矩電機是人形機器人執行器普遍采用的電機類型之一。
無框力矩電機是力矩電機的一種,以輸出扭矩的的大小為性能指標,通常可以被看成極對數很多的無刷、永磁、直驅伺服電機。
無框結構上省去了電機的外殼,使得電機更好嵌入,其顯著的特征是較大的徑長比和較多數目的磁極。
與有框電機相比,無框電機的優勢包括更高的轉矩密度、更強的散熱能力、以及針對定制系統的靈活性。
將無框電機的定子和轉子直接集成到支撐傳動組件的軸承系統,可以在很大程度縮小關節組件的尺寸。
由于無框力矩電機的中空結構便于走線,因此適用于集成度較高的人形機器人。
旋轉關節中的無框力矩電機:
02
無框力矩電機產業鏈
無框力矩電機產業鏈上游原材料中,磁性材料主要包括鋼鐵、銅、鋁等用于制造電機的定子和轉子;編碼器用于將電機的機械運動轉換為電信號,實現精確控制;中游是電機制造環節;下游廣泛應用于機器人、醫療設備、航空航天、光學以及其他技術要求較高的領域中。
根據科爾摩根披露信息,其關鍵原材料包括釹鐵硼磁材、SS400系列鋼材、電工鋼、銅材、樹脂、集成電路板等。

資料來源:科爾摩根官網
無框力矩電機的性能在很大程度上取決于其電機結構和編碼器。
編碼器影響電機運動控制功能,高端產品主依賴進口重要元件芯片、碼盤的制作工藝難度較大,是國產化的主要壁壘。
市場格局方面,編碼器市場長期被海外企業占據,例如海德漢、多摩川、雷尼紹等。據MIR數據,2023年多摩川和海德漢兩家合計在我國市占率約42%。
我國本土領先供應商包括禹衡光學(奧普光電)、長春匯通(匯川技術)、宜科電子,蘇州捷之碩等,其中禹衡光學在國內處于領先地位、技術水平能夠和外資競爭,市占率約7.7%。
國內企業禹衡光學前身長春第一光學儀器廠于1965年成立,1986年開始引進日本制造技術,確立編碼器產品為發展重點,逐步形成自主知識產權和品牌。2013年,奧普光電收購禹衡光學,切入光柵傳感器業務。
長春匯通生產的磁編碼器應用于公司自產的伺服電機,開發的產品主要有增量式光電編碼器、絕對式光電編碼器等,匯川技術通過收購長春匯通進入編碼器行業。
蘇州捷之碩公司的產品邁可斯可替代內策爾、雷尼紹等品牌,廣泛應用于機器人關節、半導體、精密設備等領域。
03
無框力矩電機市場格局
無框力矩電機目前存在較高的技術壁壘,全球市場呈頭部集中的格局。
全球無框力矩電機主要制造商包括科爾摩根(美國)、威騰斯坦(德國)、尼得科(日本)、派克漢尼汾(美國)、MAXONMOTOR(瑞士)等。
科爾摩根是全球最早研發出無框電機的企業,具備高端產品核心生產技術,KBM系列無框電機為公司明星產品。
我國無框電機行業玩家少,集中度較高,頭部企業占據市場主導地位。
根據公開信息顯示,國內無框電機主要參與者包括步科股份、昊志機電、偉創電氣、禾川科技等。
步科股份進度較為靠前,已成功推出具有溫度控制穩定、尺寸小、功率密度高等優勢第三代無框電機可以對標國際領先產品,部分型號具備一定優勢,產品在高端人形機器人領域廣泛應用。
昊志機電的無框力矩電機轉矩波動≤1%,更利于機器人力矩控制,能夠提供3.5倍過載能力,可應用于協作機器人、輕型機器人、人形機器人等多個領域。
此外,國產人形機器人本體廠商如宇樹H1、遠征A1、小米Cyberone、優必選X1、傅里葉GR-1,關節單元也都使用無框力矩電機,最大扭矩為360Nm。
宇樹、智元、小米機器人均自研關節電機,能夠更好適配各自廠商的機器人產品。
目前,我國無框電機行業尚處于起步階段,市場參與者數量較少,國產替代空間廣闊。隨著特斯拉人形機器人量產將至,作為核心零部件環節,行業景氣度有望進一步提高。
04
空心杯電機行業概覽
驅動系統是機器人的關鍵部件,是使機器人發出動作的機構。
機器人驅動方式可分為液壓驅動、氣體驅動和電機驅動三種。
其中,電機驅動具有高精度、實時響應等優勢,更適合人形機器人靈活度高的發展趨勢。
而空心杯電機作為人形機器人靈巧手末端執行器的核心零部件,是目前性能最優的電機方案之一。
空心杯電機是一種微型伺服直流電機,采用的是無鐵芯轉子,消除了由于鐵芯形成渦流而造成的電能損耗,其電樞繞組為空心杯線圈,是一個空心的杯狀結構。
相比傳統電機,空心杯電機更符合人形機器人靈巧手空間緊湊、負載能力的要求,且具有體積小、功率大、響應速度快等特點。
根據特斯拉在AIDay發布的Optimus人形機器人數據,其軀干部分裝有28個執行器,靈巧手單手裝配6個執行器,合計自由度高達50個,這些執行器主要由空心杯電機和無框力矩電機等控制電機以及其他零件組成。
05
空心杯電機核心壁壘
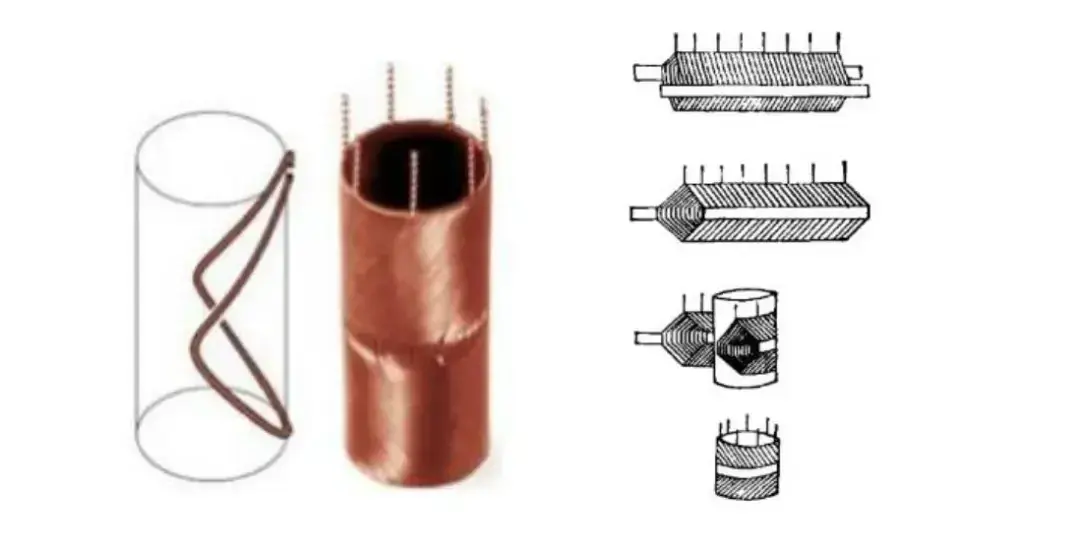
空心杯電機的主要組成部分包括空心杯繞組、轉子組件、傳感器組件、法蘭、軸承、磁軛等。
行業主要難點在于繞組設計、動平衡設計及資金投入。
核心技術壁壘包括線圈設計、繞線工藝以及繞線設備。
國際頭部企業主要采用一次性繞制成型的生產技術,且掌握壁壘線圈繞組設計和加工、壁壘繞線設備技術等核心技術。其自動化程度較高,可加工0.08-0.2mm線徑、功率400W以下電機所需線圈。
國內主要采用卷繞式生產,依賴人工且生產線徑受限,當前一次成型繞線設備有待突破。
新進入者的技術積累較淺,難以達到人形機器人領域的高效率等要求。
空心杯線圈結構(馬鞍形)及卷繞式生產示意圖:
06
空心杯電機競爭格局
在全球空心杯市場競爭方面,海外廠商較早建立起技術優勢。
德國、瑞士、美國、日本等頭部企業長期保持較高的市場占有率,形成一定程度上的壟斷。
瑞士Maxon、德國Faulhaber、瑞士Portescap等處于行業第一梯隊,并已經大量申請空心杯電機相關的專利技術。
國內一些優秀廠商正在加速追趕和布局。
以鳴志電器和鼎智科技產品為例,空心杯產品已應用于軍工、醫療、半導體等高端領域,且可以定制不同規格產品,并能以“編碼器+控制器+空心杯電機+精密齒輪箱”方案形式提供產品。
根據公開資料顯示,鳴志電器目前已實現量產銷售。公司主要通過兩次并購掌握核心技術:收購美國LinEngineering、瑞士TechnosoftMotionAG,后者在空心杯的驅動控制領域始終保持全球領先的技術水平。
橫向對比同型號MAXON和鳴志電器的空心杯電機產品,鳴志電器在空載轉速、最大連續轉矩等核心指標上與海外頂尖廠商差距不斷縮小。
鼎智科技的空心杯電機已經基本成熟,并處于中小批量供貨階段,自研的空心杯電機繞線設備實現了全自動批量生產,鼎智科技于2019年被江蘇雷利收購,成為其控股子公司。
工控領域頭部廠商偉創電氣也切入機器人領域,布局空心杯電機、無框電機等產品。偉創電氣自主研發空心杯電機,在空心杯電機領域的13mm款產品可以達到空載轉速85000rpm,最大輸出功率58W,最大額定轉矩7Nm,效率可達90%。適用于靈巧手10mm的空心杯電機模組已經取得小批量訂單。
微傳動頭部企業兆威機電轉矩直流電機和無刷空心杯電機均已形成系列產品,用于人形機器人等領域,正開展4mm直徑無刷空心杯電機攻關,以突破國外技術壁壘;8mm永磁步進電機實現自動化量產,且積極布局3.4mm和4.4mm等更難度產品。
拓邦股份是國內最早從事伺服研發的企業之一,目前在工業機器人領域已實現伺服驅動及空心杯電機的產品應用,其中空心杯無刷電機CB2060無負載轉速為12000-70000r/min,額定負載轉速達到9000-58000r/min,扭矩15-80mN.m。
雷賽智能空心杯電機采用馬鞍型全自動繞線技術、一次成型,對標全球最優空心杯電機技術水平,空心杯電機產品提供EC標準型、ECH高轉速、ECT大轉矩三大系列,已經成功應用于人形機器人靈巧手、協作機器人關節、AGV/AMR移動機器人等領域。
當前人形機器人產業化進程提速,核心零部件國產替代趨勢明確。未來隨著國產機器人硬件迭代升級,成本優勢將逐漸顯現。空心杯電機方面,隨著疊加國產繞線機器持續突破,國內相關企業加速攻克空心杯電機壁壘,有望打開高端空心杯電機市場。
隨著特斯拉人形機器人量產進程加速,人形機器人產業趨勢較強,后續有望大幅提升核心零部件的需求,從而進一步帶動國內廠商滲透率和市場份額提升。
本文重點關注人形機器人三大核心傳感器:觸覺傳感器、視覺傳感器和力/力矩傳感器。
01
力/力矩傳感器
力/力矩傳感器能夠實時測量機器人關節或末端執行器受到的力和力矩,為控制系統提供關鍵的反饋信息。可以讓機器人在執行操作時能夠自主調整其姿態,從而確保操作的穩定性和精確度。
按照測量維度的不同,力傳感覺器可以分為一維至六維力傳感器。
從主流的傳感器的測量維度來看,一、三、六維力矩傳感器為常見產品,二、五維力矩的相對較少。
測量維度的數量越多,產品生產難度越大。
根據坤維科技CTO袁明論介紹:“如果力的方向是固定的,可以采用一維力傳感器;如果力作用點與傳感器標定參考點重合,但力的方向隨機變化,可以用三維力傳感器;而如果力的方向和作用點都在三維空間里隨機變化,就應該選用六維力傳感器進行測量。”
六維力傳感器是維度最高的力覺傳感器,能夠提供最高維度的力覺信息,并給出最為全面和精準的力覺數據。
六維力矩傳感器壁壘也最高的,所需應變片數量是單維力傳感器的數倍,疊加生產難度大,其成本遠高于單維力矩傳感器。
在人形機器人的末端安裝六維力傳感器,可以獲取力傳感器往后段的力覺信息。
人形機器人對力傳感器需求明確,以特斯拉人形機器人Optimus為例,關節使用扭矩傳感器和拉力傳感器,手腕和腳腕關節使用六維力傳感器,能夠同時測量三維空間中的三個力分量和三個力矩分量,為機器人提供全面的力覺信息。
優必選為人形機器人均在手腕和腳踝處配置了4個六維力/力矩傳感器。

資料來源:優必選官網
目前六維力傳感器市場基數偏小,尚未形成明顯規模效應。
全球市場國外老牌廠商眾多,歐美國家起步較早。市場格局較為集中,前十廠商合計份額達約70%。
在全球六維力傳感器市場中,ATI占據較大的市場份額,是眾多機器人和自動化設備制造商的首選供應商。ATI率先開發出六維力和力矩傳感器,能夠測量XYZ三個方向的力和力矩。
國內廠商中目前可批量化供應的企業較少,宇立儀器、藍點觸控、坤維信息、鑫精誠、海伯森等具備較強競爭力,部分指標對標海外產品,柯力傳感、昊志機電、東華測試、安培龍、神源生智能、瑞爾特測控等公司近年來加速布局。
在2023年中國六維力傳感器市場中,宇立儀器位居第二,市場份額12.2%。排名第一的是ATI,市場份額占比為22.4%。宇立儀器的六維力傳感器被用于優必選的Walker S1人形機器人中。
藍點觸控的六維力傳感器產品已經進入大族、珞石、新松、UR等協作機器人的供應鏈中。
坤維科技的六維力傳感器與節卡、遨博、睿爾曼、越疆、思靈等協作機器人廠商開展了深度合作。
柯力傳感目前已給國內多家工業機器人、協作機器人和人形機器人客戶送樣,已取得部分協作機器人客戶的批量訂單。此外,柯力傳感已向華為交付了六維力傳感器樣品,樣品客戶已測試合格,訂單已完成交付。
在人形機器人量產前,本體企業會優先找尋研發能力強的六維力矩傳感器生產廠商配套本體開發。
在產品定型后量產降本是關鍵,具備大規模降本能力特別是擁有自動化貼片設備,且具有力傳感器大規模量產經驗的企業占優。
02
觸覺傳感器
觸覺傳感器是機器人直接感知環境作用的重要傳感器,應用于機器人的關節和柔性皮膚等領域。
作為視覺傳感的重要補充,觸覺傳感器可以使機器人通過觸摸來感知物體的形狀和質地等物理特性,從而進行精確的抓取操作。
特斯拉人形機器人手部傳感器中價值量最大的是觸覺傳感器。
觸覺傳感器主要分為柔性、和剛性(MEMS為主)。
其中,柔性觸覺傳感器具有更高的價值,壁壘主要在材料和制造兩方面。
材料選擇包括敏感材料有機聚合物、石墨烯以及柔性基底材料。
觸覺傳感器目前處于發展早期,當前市場主要以Canatu、Sensel、Flexpoint等海外企業為主。
國內布局觸覺傳感器的廠商有蘇州能斯達電子(漢威科技)、申昊科技、墨現科技、力感科技、瑞滸科技等、埔慧科技、帕西尼感知、鈦深科技、柔宇科技、宇博智能、蘇試試驗、中科納芯等。
未來各場景更精細的觸覺感知能力需求將推動機器人觸覺傳感器需求進一步增加,如人形機器人的肢體、胸腔等部位有望成為潛在應用場景。
03
視覺傳感器
視覺傳感器通過相機獲取環境圖像,進行物體識別和跟蹤。
深度攝像頭(如激光雷達、ToF攝像頭)可以幫助獲取3D空間信息,使人形機器人能夠識別周圍環境中的物體行人和障礙物等,實現避障和導航等功能。
激光雷達用于環境的高精度測距,幫助機器人了解周圍障礙物的位置和動態,為路徑規劃和避障提供重要信息。
禾賽科技推出了面向機器人領域的迷你3D激光雷達JT系列產品,采用禾賽第四代自研芯片,擁有全球最廣的360° x 187°超半球視野,為機器人提供零盲區的三維感知能力。
速騰聚創推出了全球首款機器人全固態數字化激光雷達E1R,搭載數字化SPAD-SoC芯片和2D VCSEL芯片,可以支持各類型移動機器人在不同光照條件場景中穿梭作業。
奧比中光最新研發的dToF(直接飛行時間)激光雷達傳感器芯片LS635,集成了高性能SPAD像素以及高性能數據處理模塊的激光雷達傳感器芯片,采用行業最先進的3D堆疊工藝的背照式SPAD-SoC芯片,已應用于機器人、無人機和自動駕駛等場景。
機器視覺是人工智能最重要的前沿技術之一,其底層邏輯在于為機器植入“人眼與大腦”,使機器可代替人工來對被檢測物品做測量與判斷。
當前機器視覺向機器人視覺不斷進化,人形機器人視覺方案目前主要以結構光、雙目或多目RGB、TOF 等的組合方案為主。
全球機器視覺市場以美國康耐視和日本基恩士為代表的廠商占據全球超 50%的市場份額。
國內機器視覺行業以海康威視、大恒科技、天準科技、凌云光為代表的中國本土機器視覺廠商已在核心零部件技術與獨立軟件算法等方面進行大力投入;奧比中光在中國服務機器人3D視覺傳感器領域市占率超過70%;奧普特擁有完整的機器視覺核心軟硬件產品。
此外,IMU能夠實時測量人形機器人在三維空間中的角速度和加速度,通過感知機器人身體的傾斜、旋轉等姿態變化,為控制系統提供實時反饋,使其能夠快速調整機器人的步態和姿態,以保持平衡防止摔倒。該領域主要布局廠商有敏芯股份和芯動聯科等。
隨著特斯拉人形機器人量產進程加速,人形機器人產業趨勢較強,后續有望大幅提升核心零部件的需求,從而進一步帶動國內廠商滲透率和市場份額提升。
來源:網絡
-
機器人
+關注
關注
211文章
28611瀏覽量
207891 -
人工智能
+關注
關注
1793文章
47592瀏覽量
239498 -
產業鏈
+關注
關注
3文章
1352瀏覽量
25801 -
人形機器人
+關注
關注
2文章
488瀏覽量
16718
發布評論請先 登錄
相關推薦
人形機器人趨勢論道:融合性人才、產業鏈集群、零部件小型化等備受關注

全球巨頭加速布局人形機器人賽道

2026年:人形機器人產業規模預計超200億元大關

從市場角度簡要解讀“人形機器人”

人形機器人核心零部件梳理之行星滾柱絲杠

廣和通成功入選2024人形機器人供應鏈優質企業
高工機器人公布“2024機器視覺產業鏈TOP30”第三批參評企業名單
為何要做人形機器人?
華為云在人形機器人領域展開合作
人形機器人成為車圈“新寵”?






 工商網監
工商網監
評論