") 伺服電機編碼器
伺服電機編碼器
在現(xiàn)代工業(yè)自動化和控制系統(tǒng)中,伺服電機編碼器扮演著至關(guān)重要的角色。它能夠精確測量電機的位置、速度和方向,為系統(tǒng)提供準(zhǔn)確的反饋信息,實現(xiàn)高精度的運動控制。伺服電機編碼器作為伺服系統(tǒng)中的關(guān)鍵部件,其性能和可靠性直接影響著整個系統(tǒng)的運行效果。我們就來深入了解一下伺服電機編碼器的原理、類型、精度、安裝、調(diào)試、維護(hù)以及故障排除等方面的知識。
一、編碼器原理
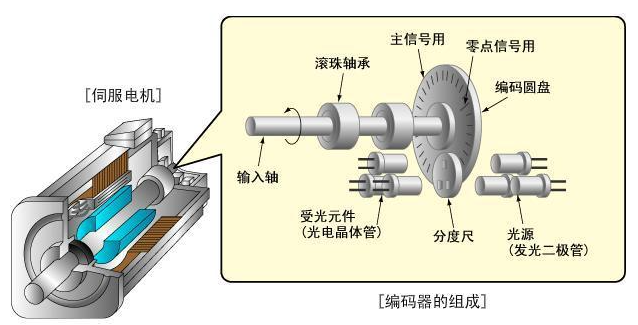
編碼器是一種將機械運動轉(zhuǎn)換為電信號的裝置。其工作原理基于光電效應(yīng)、電磁感應(yīng)或電容變化等。常見的編碼器有增量式編碼器和絕對式編碼器。
增量式編碼器在電機旋轉(zhuǎn)時,通過檢測光信號或電磁信號的變化來產(chǎn)生脈沖序列,從而計算出電機的速度和相對位置變化。
絕對式編碼器則在每個位置都有唯一的編碼值,能夠直接讀取電機的絕對位置,無需進(jìn)行初始位置校準(zhǔn)。
二、編碼器類型
1. 光電編碼器:利用光電轉(zhuǎn)換原理,通過光柵盤和光電檢測裝置來測量電機的運動參數(shù)。具有精度高、響應(yīng)速度快的優(yōu)點,但對環(huán)境要求較高。
2. 磁性編碼器:基于磁性感應(yīng)原理,通過檢測磁場的變化來獲取位置信息。具有抗干擾能力強、可靠性高的特點。
3. 電容編碼器:利用電容變化來測量位移,具有分辨率高、精度好的優(yōu)勢。
三、伺服電機編碼器精度
伺服電機編碼器的精度直接影響著伺服電機的控制精度。精度通常由分辨率和誤差兩個指標(biāo)來衡量。
分辨率表示編碼器能夠測量的最小位移量,單位通常為線數(shù)或位數(shù)。分辨率越高,測量精度就越高。
誤差則包括線性誤差、重復(fù)精度等,這些誤差會影響編碼器測量結(jié)果的準(zhǔn)確性。
四、伺服電機編碼器安裝
正確的安裝是確保伺服電機編碼器正常工作的關(guān)鍵。在安裝時,需要注意以下幾點:
1. 安裝位置要準(zhǔn)確,確保編碼器與電機軸的同心度和垂直度。
2. 安裝時要避免過大的軸向和徑向力,以免損壞編碼器。3. 連接電纜要固定可靠,避免受到拉扯和扭曲。
五、伺服電機編碼器調(diào)試
伺服電機編碼器安裝完成后,需要進(jìn)行調(diào)試以確保其正常工作。調(diào)試過程包括:
1. 設(shè)定編碼器的參數(shù),如分辨率、脈沖數(shù)等。
2. 進(jìn)行零位校準(zhǔn),確保編碼器的初始位置準(zhǔn)確。
3. 測試編碼器的輸出信號,檢查其是否穩(wěn)定、準(zhǔn)確。
六、伺服電機編碼器維護(hù)
為了延長編碼器的使用壽命,需要定期進(jìn)行維護(hù)。維護(hù)工作包括:
1. 清潔編碼器表面,防止灰塵和油污影響其性能。
2. 檢查連接電纜是否有破損、松動等情況。
3. 定期對編碼器進(jìn)行校準(zhǔn)和檢測,確保其精度符合要求。
七、伺服電機編碼器故障排除
當(dāng)伺服電機編碼器出現(xiàn)故障時,需要及時進(jìn)行排除。常見的故障有:
1. 信號丟失或不穩(wěn)定:可能是連接不良、電纜損壞或編碼器內(nèi)部故障導(dǎo)致。
2. 精度下降:可能是由于編碼器磨損、污染或安裝不當(dāng)引起。
3. 零位偏移:可能是由于機械振動、沖擊或調(diào)試不當(dāng)造成。
針對不同的故障,需要采取相應(yīng)的排查和解決措施。
-
編碼器
+關(guān)注
關(guān)注
45文章
3663瀏覽量
135011 -
伺服電機
+關(guān)注
關(guān)注
85文章
2057瀏覽量
58062 -
工業(yè)自動化
+關(guān)注
關(guān)注
17文章
2470瀏覽量
67329
發(fā)布評論請先 登錄
相關(guān)推薦







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論