 Made with KiCad(113):低功耗藍牙智能骰子
Made with KiCad(113):低功耗藍牙智能骰子
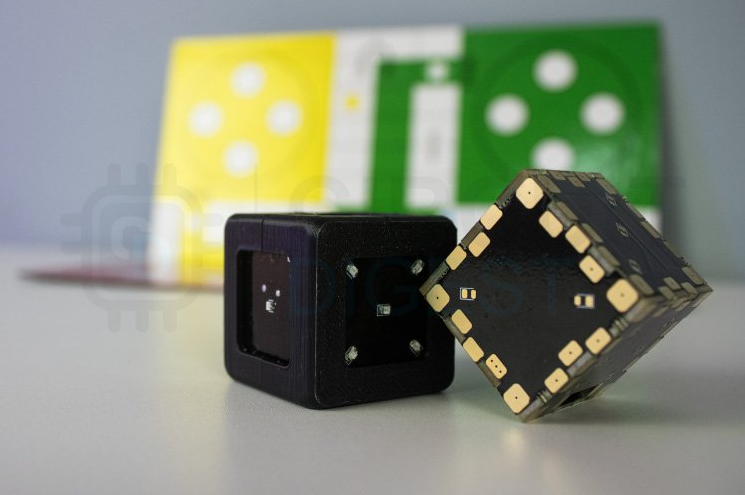
“設計使用了由nRF52840 構建的低功耗模組 NINA-B306-00B,并集成了 MPU6050 慣性測量單元。”
Made with KiCad 系列將支持新的展示方式。直接將以下鏈接復制到瀏覽器中(或點擊“閱讀原文”):
https://www.eda.cn/ecadViewer/viewerPage?xmlId=3c9d9977-5c4e-4983-b276-e2bc50c85f7a&fileZip=%2Fdata%2Fdesign%2Fdemo%2F3c9d9977-5c4e-4983-b276-e2bc50c85f7a.zip 即可動態查看設計的原理圖、PCB、3D 及 BOM,查詢設計中器件、走線、焊盤的屬性詳情。還可以在原理圖中與AI小助手互動,幫您更高效地學習設計細節:
 概覽 智能篩子選擇了帶有NRF52840的NINA-B306模塊。相比直接使用裸的 nRF52840芯片,該模塊在使用上更為方便。NRF52840相較于其他同類產品,比如ESP32,不僅在功耗方面表現更為出色,具有更高的能效,能夠有效延長設備的使用時間,降低能耗。NRF52840 在開發集成開發環境(IDE)方面也有更好的支持,例如Arduino IDE。
概覽 智能篩子選擇了帶有NRF52840的NINA-B306模塊。相比直接使用裸的 nRF52840芯片,該模塊在使用上更為方便。NRF52840相較于其他同類產品,比如ESP32,不僅在功耗方面表現更為出色,具有更高的能效,能夠有效延長設備的使用時間,降低能耗。NRF52840 在開發集成開發環境(IDE)方面也有更好的支持,例如Arduino IDE。
功能特性
基于 nRF52840 低功耗、多協議 Bluetooth 5 SoC。
藍牙 V5 低能耗連接。可與智能手機、平板電腦或支持 BLE 的定制設備配對。
兼容 Arduino Nano 33 BLE。
MPU6050 IMU 集成加速計和陀螺儀,用于檢測骰子的方向和移動,以進行滾動檢測。
人臉指示 LED。
用于狀態指示的 RGB LED。
定制印刷電路板,布局緊湊、優化,集成了所有元件。
設計符合骰子外形尺寸。
使用 MPU6050 進行實時方向檢測,以確定擲出骰子后的朝向。
擲骰子后,LED 亮起,顯示骰子朝上的數字。
支持 Android 應用程序。配套應用程序可接收擲骰子數據并顯示結果。
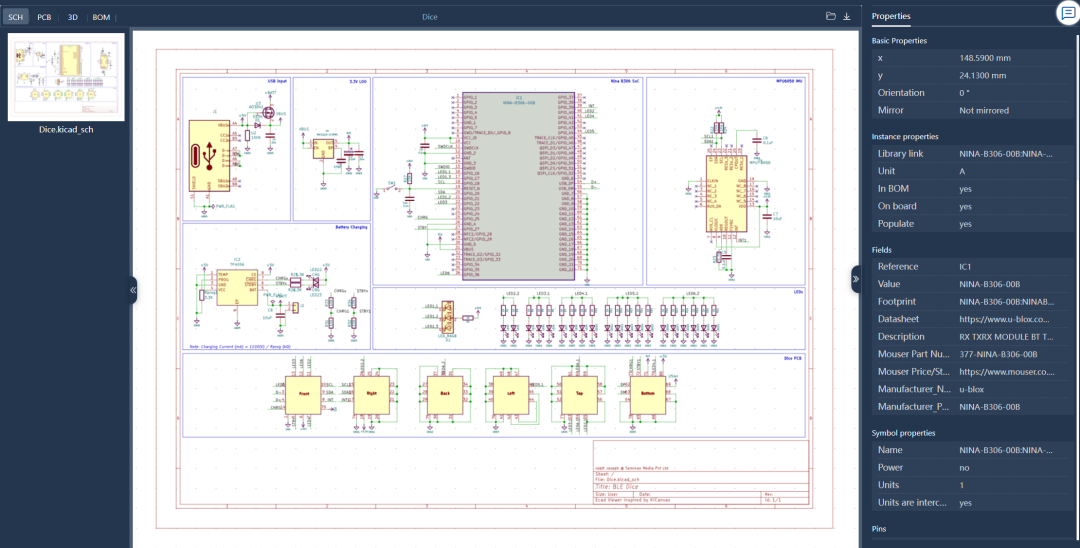
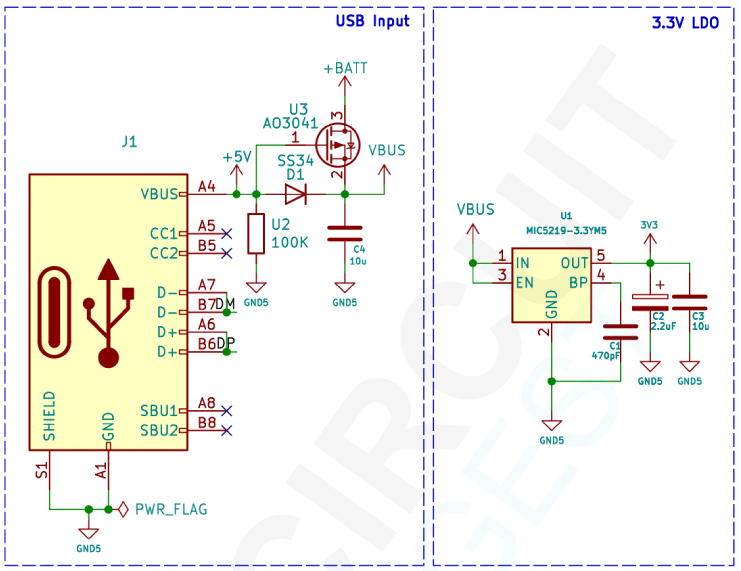
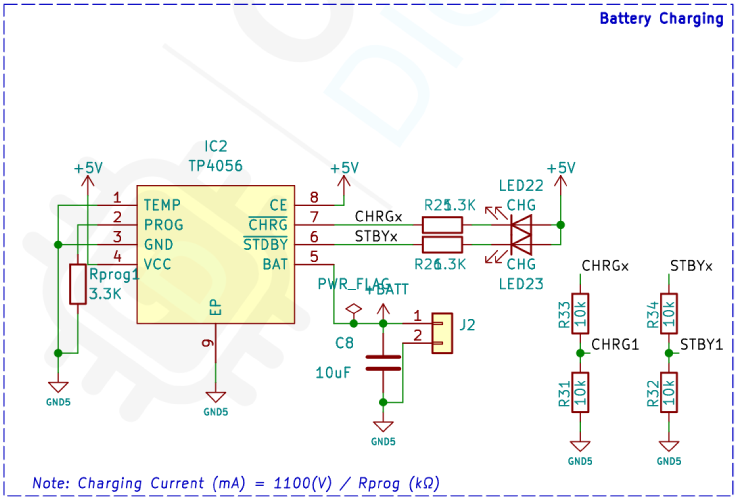
首先是電源部分,包括電源輸入、電池充電和電壓調節。C 型 USB 端口用于充電和編程。USB 端口的電源連接到圍繞 P 溝道 MOSFET U3 和二極管 D1 構建的電源路徑控制器電路。這樣,我們就可以通過 USB 輸入或電池為電路板供電,而不會產生任何問題。電池充電電路由 TP4056 獨立線性鋰電池充電控制器 IC 構成。它接受 USB 端口的 5V 輸入,并為內部電池充電。TP4056 還提供兩個指示燈,一個是充電指示燈,另一個是滿電指示燈。
我們還在這些指示引腳上連接了分壓器,用于監控充電狀態。為了將電源路徑控制器的 VBUS 電壓轉換為 3.3V 電壓,我們使用了 MIC5219 超低噪聲低壓差穩壓器。只需極少的輔助元件,MIC5219 就能提供非常穩定的輸出電壓,即使在電池電量較低時也是如此。
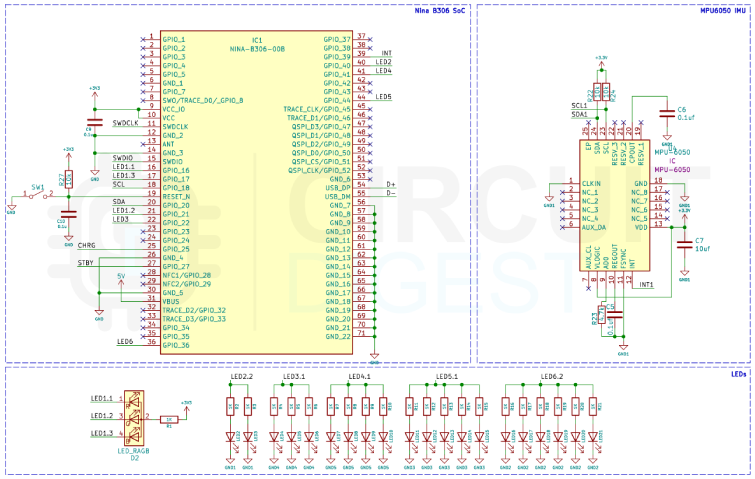
接下來是作為大腦的 Nina B306-00B 模塊。Nina B306-00B 采用了 Nordic Semiconductor nRF52840 藍牙 5 低能耗 SoC,配備了帶浮點運算單元的 Arm Cortex-M4 處理器,工作頻率為 64 MHz。它集成了 1 MB 閃存和 256 kB RAM,為代碼和數據存儲提供了充足的空間。在運動和方向檢測方面,我們使用了 InvenSense 公司的 MPU6050 IMU,它在同一個硅芯片上配備了一個三軸陀螺儀和一個三軸加速計,以及一個板載數字運動處理器,用于處理復雜的六軸 MotionFusion 算法。MPU6050 通過 I2C 接口與 Nina B306 模塊相連。
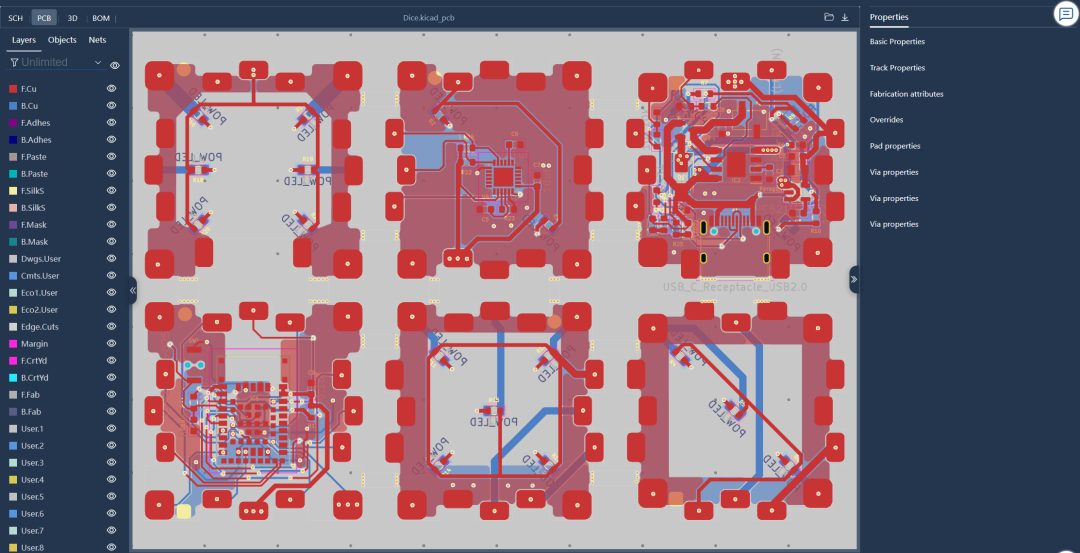
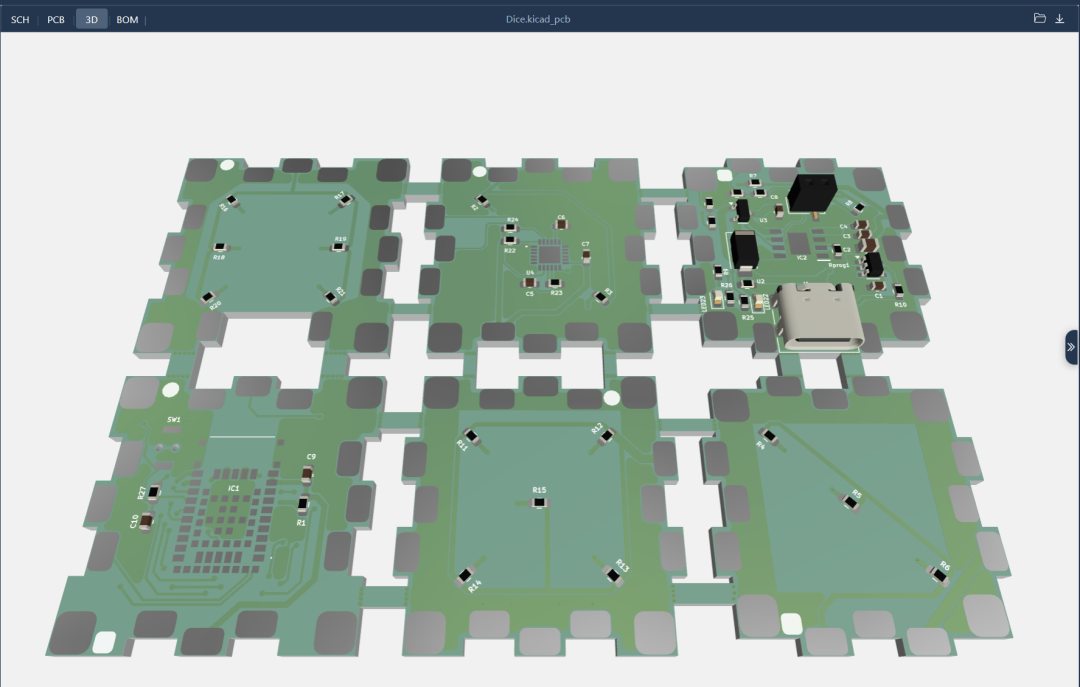
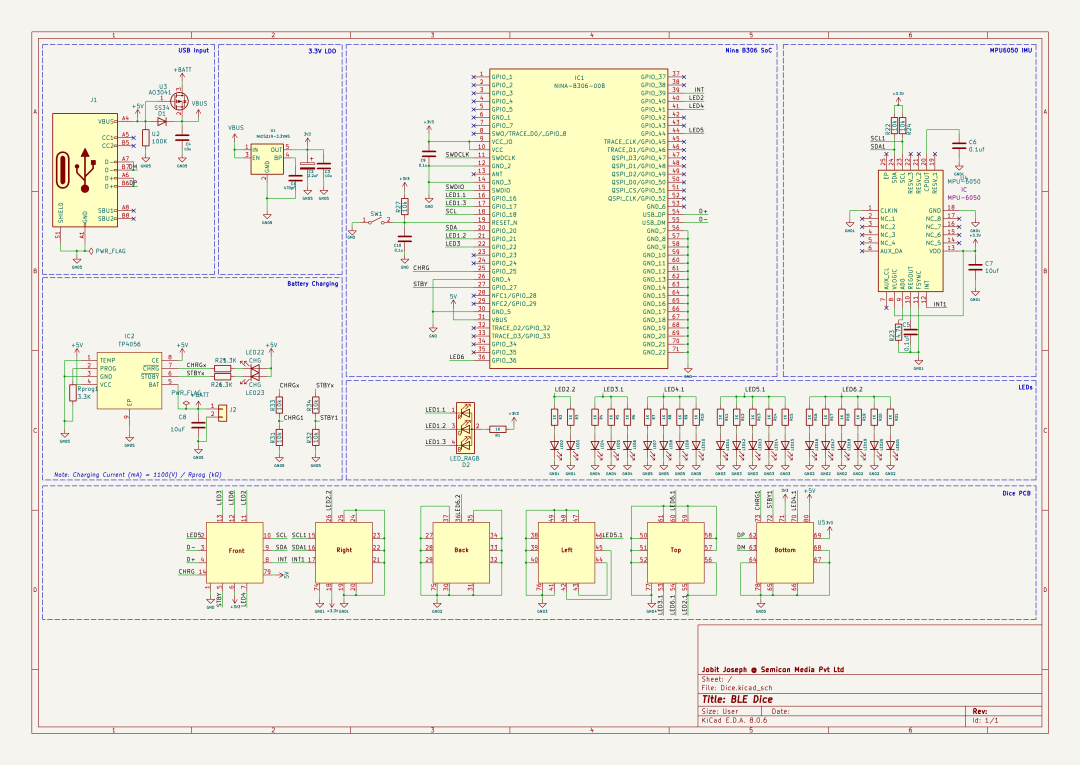
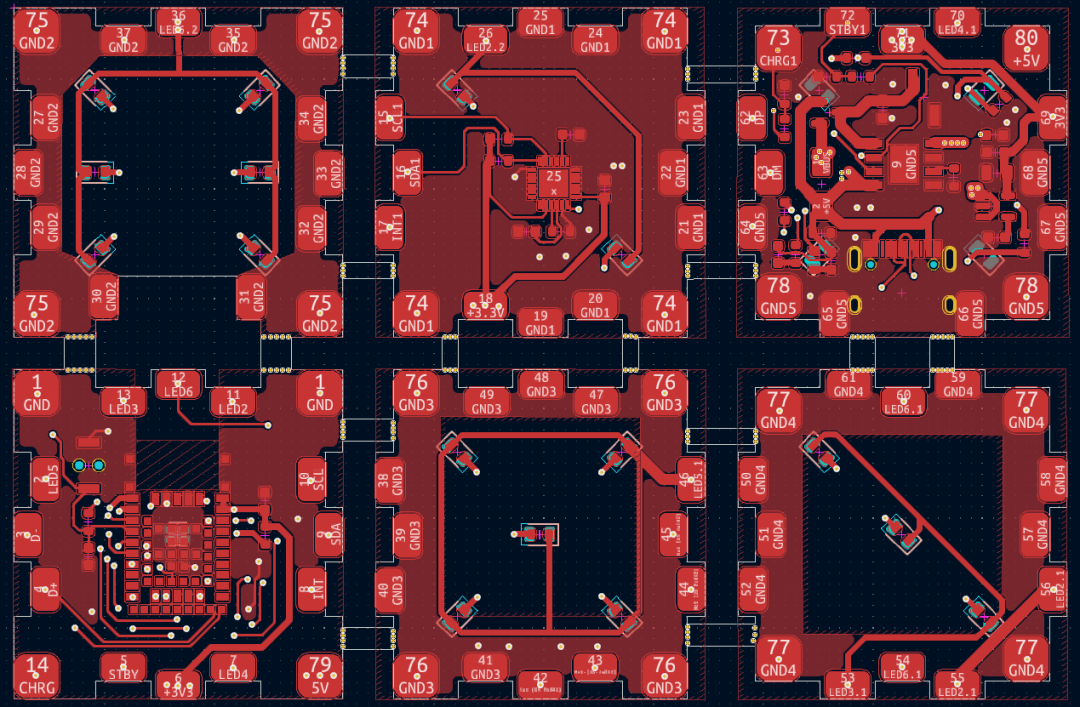
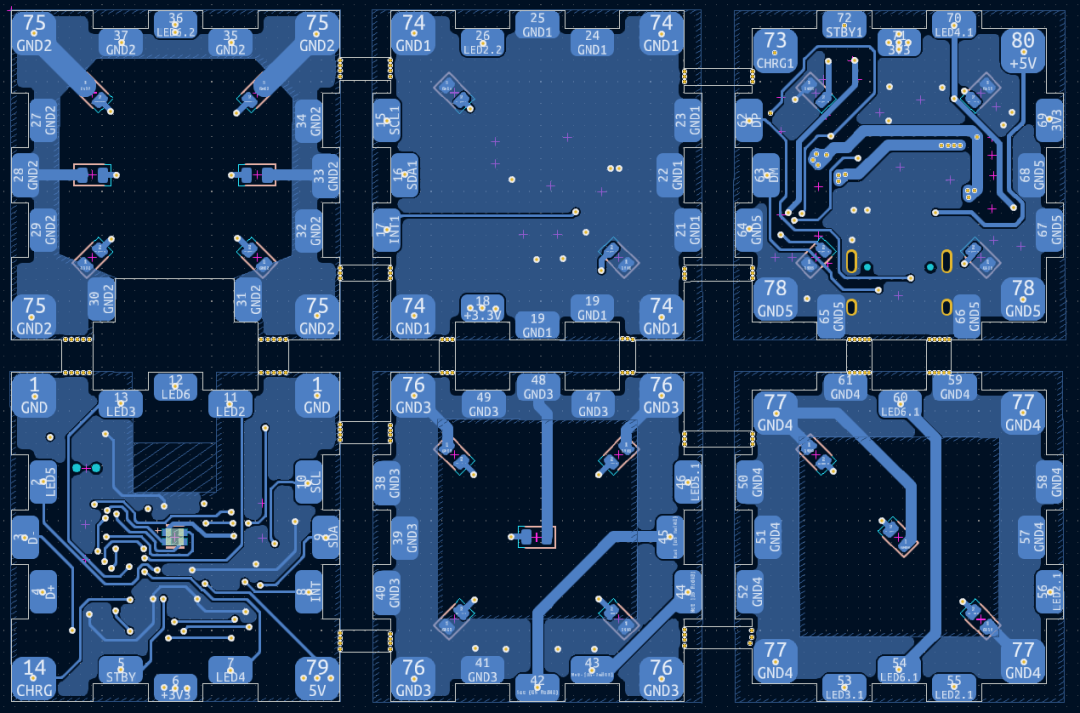
原理圖 & PCB
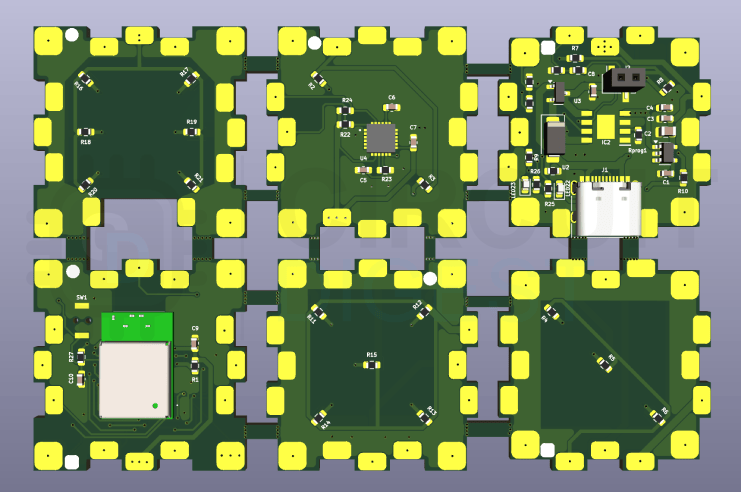
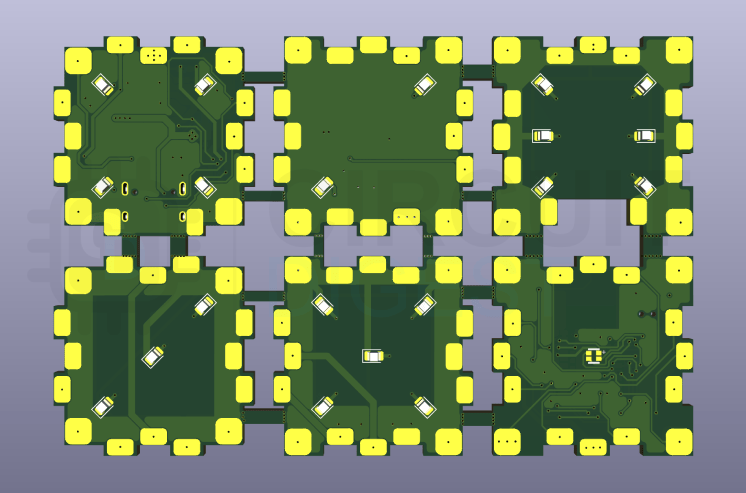
實物圖



License N/A
倉庫 & 下載
可以在Github中獲取開源倉庫:
https://github.com/Circuit-Digest/BLE-Dice
Baidu 下載:

參考文檔: https://circuitdigest.com/microcontroller-projects/how-to-build-a-smart-led-dice
注意:如果想第一時間收到 KiCad 內容推送,請點擊下方的名片,按關注,再設為星標。
常用合集匯總:
和 Dr Peter 一起學 KiCad
KiCad 8 探秘合集
KiCad 使用經驗分享
KiCad 設計項目(Made with KiCad)
常見問題與解決方法
KiCad 開發筆記
插件應用
發布記錄
審核編輯 黃宇
-
藍牙
+關注
關注
114文章
5859瀏覽量
170919 -
低功耗
+關注
關注
10文章
2417瀏覽量
103822 -
KiCAD
+關注
關注
5文章
170瀏覽量
8836
發布評論請先 登錄
相關推薦
Made with KiCad(111):Vimdrones AM32 ESC 開發板

Made with KiCad(108):基于 LattePanda-Mu 的 nvme 載板
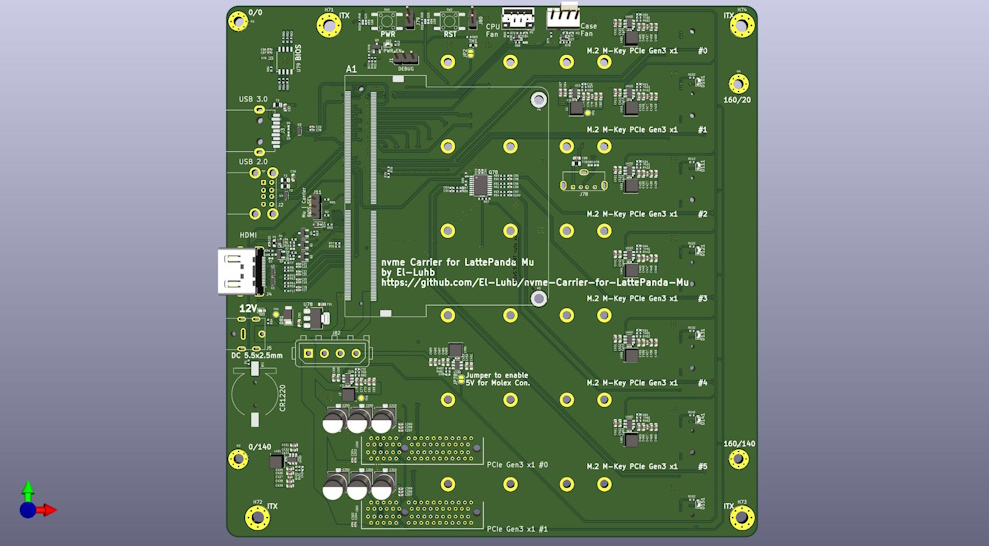
Made with KiCad(107):LattePanda-Mu 載板(Lite Carrier)

物聯網系統中常用的低功耗自組網無線傳輸方案(三)_藍牙芯片篇
HID over GATT配置文件(HOGP)低功耗藍牙

國產藍牙模組 | 低功耗藍牙應用

低功耗藍牙和藍牙Mesh模塊的區別與關系
低功耗藍牙模塊在智能電子稱上的應用
低功耗藍牙模塊輕松實現智能防丟器
藍牙模塊選經典藍牙還是低功耗藍牙?
請問STM32WB55怎么配置藍牙到低功耗廣播狀態?
低功耗藍牙技術的特點 低功耗藍牙如何實現低功耗?
低功耗藍牙模塊備受歡迎的原因有哪些?





 工商網監
工商網監
評論