") 自動駕駛激光雷達技術(shù)轉(zhuǎn)型路
自動駕駛激光雷達技術(shù)轉(zhuǎn)型路
汽車行業(yè)的智能化浪潮正在加速,各種感知設備在實現(xiàn)自動駕駛功能中的作用日益顯著。其中激光雷達通過高精度點云數(shù)據(jù)感知周邊環(huán)境,極大地提高了自動駕駛系統(tǒng)的可靠性和安全性。作為高級別自動駕駛的重要感知設備,其高精度、遠探測能力和實時3D建模特性,使其成為汽車智能化發(fā)展的黃金賽道。隨著技術(shù)路徑的快速迭代,激光雷達正從機械式向固態(tài)化、芯片化發(fā)展,為汽車行業(yè)的智能升級提供重要技術(shù)支撐。尤其是在高級別自動駕駛(L3及以上)中,激光雷達憑借優(yōu)異的長尾場景感知能力,已成為多傳感器融合系統(tǒng)中不可或缺的組成部分。
激光雷達的技術(shù)組成與原理
激光雷達作為一種基于激光探測原理的傳感器,其核心由發(fā)射模塊、接收模塊、掃描模塊和信息處理模塊四部分組成。各模塊協(xié)同工作,實現(xiàn)對周邊環(huán)境的三維建模和高精度探測。
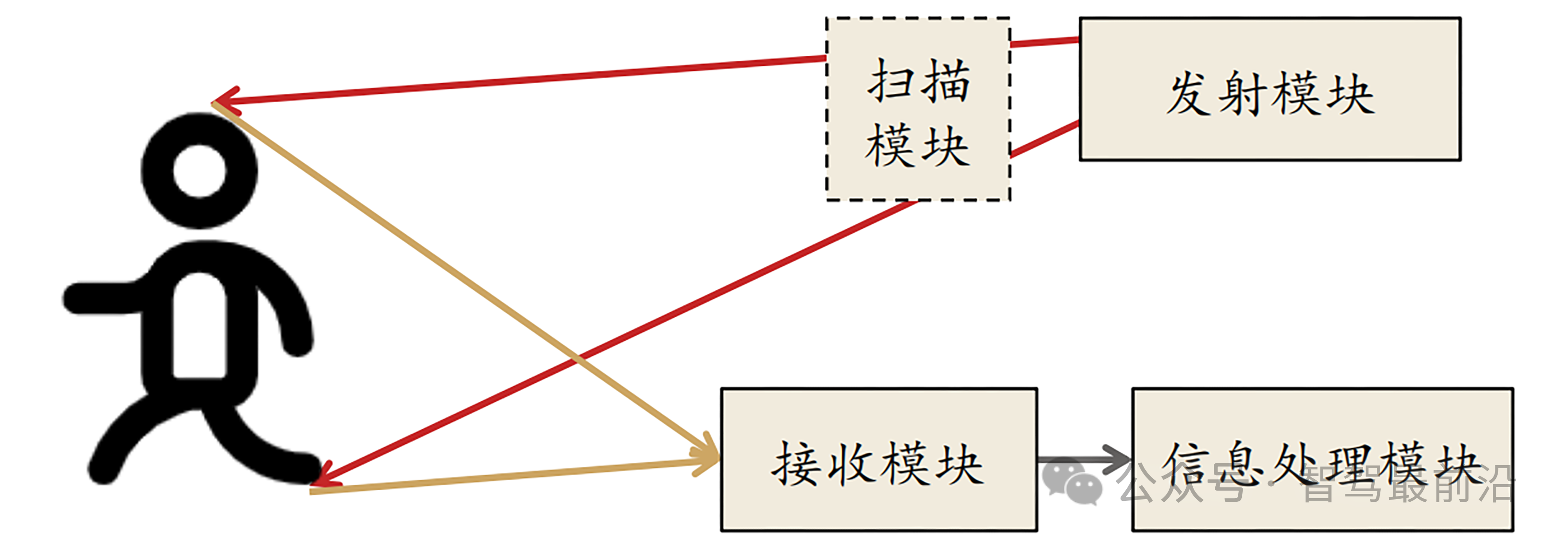
激光雷達的四個模塊
1.1激光發(fā)射模塊
激光發(fā)射模塊是激光雷達系統(tǒng)的核心組件,其主要任務是產(chǎn)生激光并將其以一定方式發(fā)射出去。激光器種類繁多,目前車載激光雷達主要使用半導體激光器,包括邊發(fā)射激光器(EEL)和垂直腔面發(fā)射激光器(VCSEL)。EEL激光器因其具有較高的發(fā)光功率密度而被廣泛采用,但其生產(chǎn)過程依賴手工裝配,導致成本較高且一致性難以保證。而VCSEL則通過半導體加工技術(shù)實現(xiàn)高精度生產(chǎn),具有較低的成本和更高的可靠性。VCSEL激光器的多層結(jié)結(jié)構(gòu)也可顯著提高發(fā)光功率密度,滿足車載應用中對長距離和高精度探測的需求,VCSEL激光器逐步成為主流趨勢。
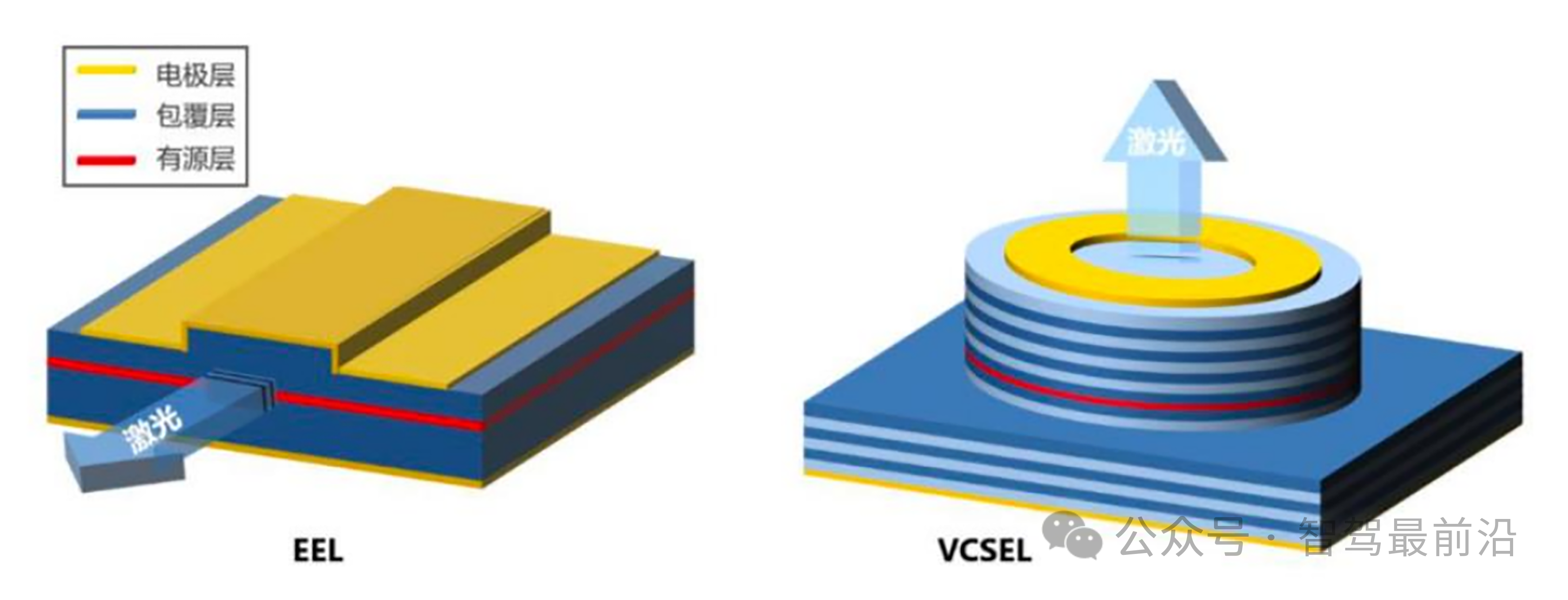
EEL與VCSEL圖示
激光波長是影響激光雷達性能的重要因素。目前主流的波長有905nm和1550nm兩種。905nm激光波長適用于成本敏感的場景,且雨雪天氣適應性較好;而1550nm波長因其在人眼安全性、光束準直性及抗干擾能力方面的優(yōu)勢,具有更高的探測性能。在未來的高端激光雷達中,隨著1550nm相關(guān)技術(shù)的成本下降,其應用比例預計將顯著增加。
1.2激光接收模塊
接收模塊通過光電探測器捕獲反射激光信號并將其轉(zhuǎn)化為電信號,是激光雷達感知功能的關(guān)鍵部分。當前市場上主要使用APD(雪崩光電二極管)作為探測器,其在靈敏度和增益能力方面能夠滿足目前L2/L3級別的自動駕駛需求。然而,APD在接收多點信號時靈敏度較低,難以支持更高復雜度的場景。SPAD(單光子雪崩二極管)和SiPM(硅光電倍增管)正在成為下一代探測器的研發(fā)重點。SPAD能夠?qū)崿F(xiàn)高靈敏度的大規(guī)模陣列接收,具備更高的抗干擾能力和探測效率,是車載激光雷達發(fā)展的重要方向之一。SiPM則以其更低的噪聲和優(yōu)異的信號增益性能,在低成本應用場景中展現(xiàn)出極大的潛力。
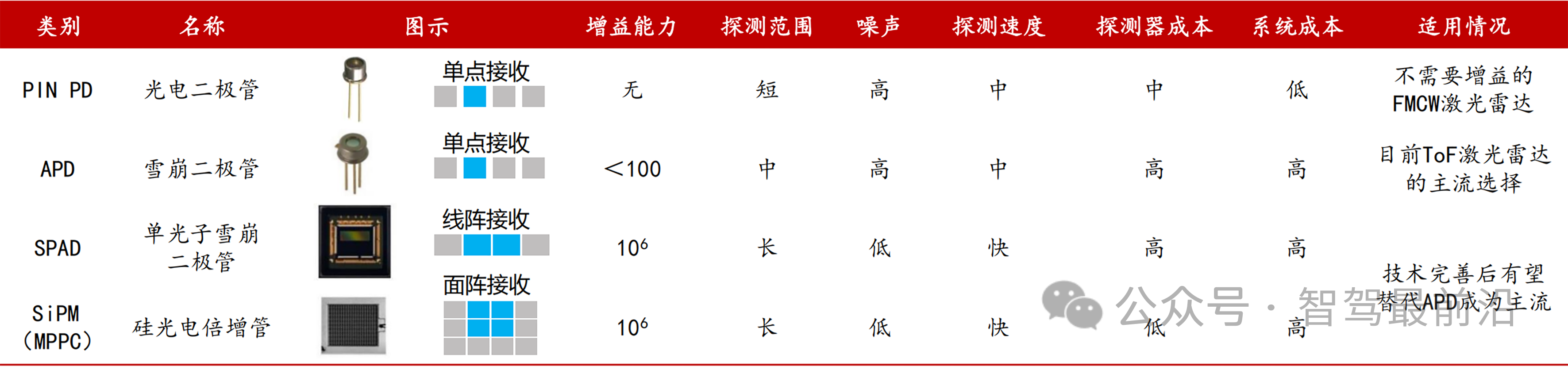
激光探測器對比
接收模塊還包括接收光學系統(tǒng),其主要由透鏡、分束器和窄帶濾光片等元件構(gòu)成。這些元件的作用是最大化地收集反射光能量,并將其聚焦到探測器的光敏面上,從而提高系統(tǒng)整體的信噪比和感知精度。
1.3掃描模塊
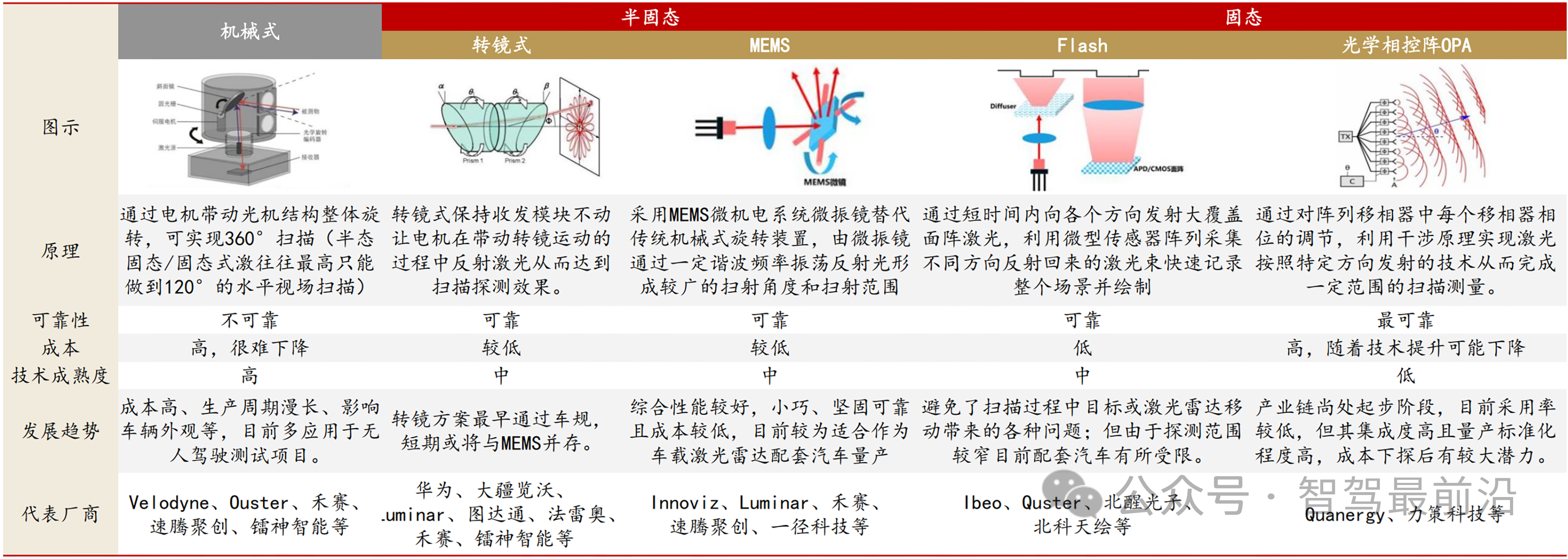
掃描模塊決定了激光雷達的探測范圍和分辨率,是系統(tǒng)中最重要的組成部分之一。根據(jù)掃描方式是否包含機械部件,激光雷達可分為機械式、混合固態(tài)和純固態(tài)三種類型。
激光發(fā)射系統(tǒng)簡單構(gòu)成
機械式激光雷達通過電機驅(qū)動掃描部件旋轉(zhuǎn),可實現(xiàn)全景式360°探測,但其體積大、成本高且易受振動影響,難以適應車載應用需求。混合固態(tài)激光雷達利用MEMS振鏡或轉(zhuǎn)鏡替代部分機械部件,大幅降低了系統(tǒng)的尺寸和重量,同時保持較高的掃描性能,是當前量產(chǎn)車載激光雷達的主流選擇。而純固態(tài)激光雷達,如OPA和FLASH技術(shù),則完全去除了機械部件,通過光學相控陣實現(xiàn)光束控制,具有更高的集成度和可靠性,被視為未來的技術(shù)方向。
1.4信息處理模塊
信息處理模塊的主要任務是對接收到的光信號進行分析和處理,生成高精度的三維點云數(shù)據(jù)。該模塊通常由放大器、模數(shù)轉(zhuǎn)換器和處理器芯片構(gòu)成。高效算法是信息處理模塊的核心,目前廣泛應用的包括點云分割算法、目標識別與跟蹤算法以及即時定位與地圖構(gòu)建(SLAM)算法。這些算法通過對大規(guī)模點云數(shù)據(jù)的快速處理,實現(xiàn)對周邊環(huán)境的精準建模,為自動駕駛系統(tǒng)提供可靠的環(huán)境感知支持。
技術(shù)路徑與發(fā)展現(xiàn)狀
2.1 TOF與FMCW技術(shù)
飛行時間法(TOF)是當前激光雷達的主流測距方式,其通過測量激光從發(fā)射到接收的時間差計算目標距離,具有高精度和遠探測能力。然而,TOF在信噪比和抗干擾能力方面的局限性限制了其在復雜場景中的表現(xiàn)。相比之下,F(xiàn)MCW(調(diào)頻連續(xù)波)技術(shù)通過測量激光頻率的變化來計算目標距離和速度,具有更高的信噪比和更強的抗干擾能力。FMCW激光雷達能夠直接獲取每個點的速度信息,為實現(xiàn)動態(tài)場景中的高精度感知提供了重要支持。隨著FMCW技術(shù)的進一步成熟,其在高端車載激光雷達中的應用將顯著增加。
2.2固態(tài)激光雷達的發(fā)展趨勢
固態(tài)化被認為是激光雷達發(fā)展的重要方向,其目標是通過消除機械部件實現(xiàn)更高的可靠性和更低的成本。在當前激光雷達技術(shù)路徑中,機械式和混合固態(tài)激光雷達仍占據(jù)主流地位,但純固態(tài)技術(shù)正以其獨特的優(yōu)勢逐步成為行業(yè)的重點研發(fā)方向。MEMS(微機電系統(tǒng))激光雷達是混合固態(tài)技術(shù)的代表,其采用振鏡替代傳統(tǒng)的機械旋轉(zhuǎn)部件,通過微型反射鏡的高頻振動實現(xiàn)激光的掃描。這種技術(shù)大幅降低了系統(tǒng)的體積和重量,同時提高了系統(tǒng)的穩(wěn)定性和耐用性。盡管MEMS激光雷達在抗振動能力和掃描角度上存在一定限制,但其成熟的工藝和較低的成本使其成為目前量產(chǎn)車型的主要選擇。
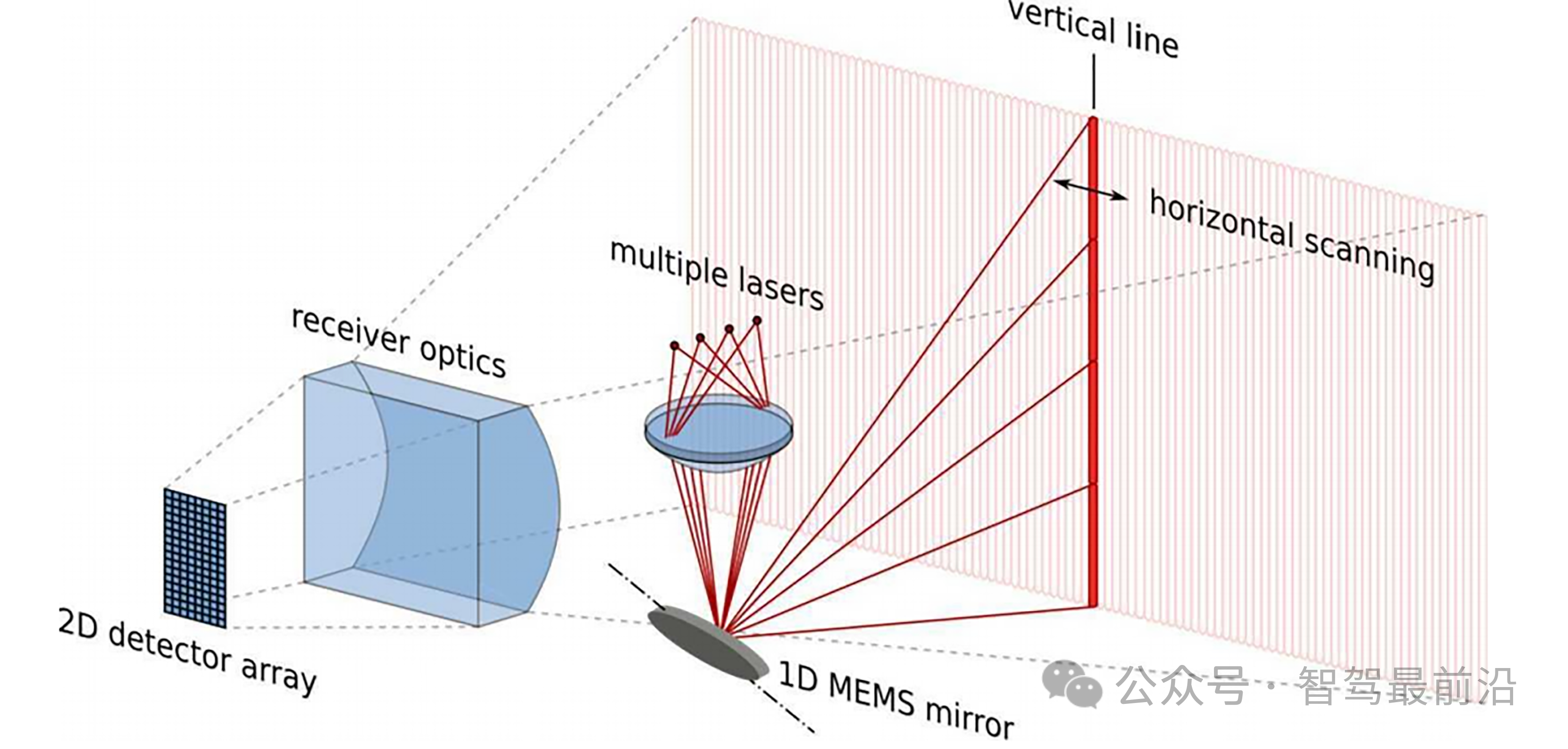
MEMS激光雷達原理圖示
FLASH和OPA(光學相控陣)激光雷達則是純固態(tài)技術(shù)的代表。FLASH激光雷達通過面光源實現(xiàn)全場景掃描,無需機械運動部件,具備更高的可靠性。由于面光源的能量分散問題,其探測距離相對較短,目前主要適用于中短距離場景。OPA激光雷達則通過光學相控陣技術(shù)調(diào)節(jié)光束方向,實現(xiàn)動態(tài)掃描。OPA技術(shù)不僅具有高集成度,還能顯著降低系統(tǒng)功耗,被認為是未來激光雷達的終極形態(tài)。
2.3芯片化與集成化
芯片化被視為激光雷達降低成本、提升性能的關(guān)鍵途徑。傳統(tǒng)激光雷達通常由多個獨立的硬件模塊組成,復雜的裝配工藝導致生產(chǎn)成本居高不下。通過將激光發(fā)射模塊、接收模塊和處理模塊集成至單一芯片,整機廠商能夠顯著減少組件數(shù)量,降低裝配難度,同時提高系統(tǒng)的一致性和可靠性。禾賽科技等國內(nèi)企業(yè)已在芯片化領(lǐng)域取得重要進展。其多通道發(fā)射芯片和模擬前端芯片的研發(fā),使得激光雷達的硬件成本分別降低了70%和80%。芯片化技術(shù)還支持大規(guī)模自動化生產(chǎn),為激光雷達的商業(yè)化推廣提供了有力支持。未來,隨著ASIC(專用集成電路)和SoC(片上系統(tǒng))方案的普及,激光雷達的性能和成本結(jié)構(gòu)將進一步優(yōu)化。
激光雷達的市場潛力與產(chǎn)業(yè)鏈布局
3.1市場潛力分析
隨著高級別自動駕駛技術(shù)的快速發(fā)展,激光雷達的市場需求持續(xù)增長。據(jù)預測,到2030年,中國乘用車領(lǐng)域激光雷達市場規(guī)模將達到980億元,年復合增長率超過30%。激光雷達的廣泛應用不僅限于自動駕駛車輛,還涉及服務機器人、智能交通、安防監(jiān)控等多個領(lǐng)域,展現(xiàn)出強大的市場擴展能力。在L2級輔助駕駛中,激光雷達主要用于補充攝像頭和毫米波雷達的感知能力,為系統(tǒng)提供更精準的距離和三維信息。隨著L3及以上高級別自動駕駛的逐步普及,對激光雷達的需求量將大幅增加。特別是在處理復雜場景和長尾場景時,激光雷達的高精度感知能力不可替代,這將進一步推動市場的快速擴容。
3.2產(chǎn)業(yè)鏈布局
激光雷達的產(chǎn)業(yè)鏈主要分為上游元器件、中游整機廠和下游應用領(lǐng)域。上游元器件包括激光器、探測器、掃描鏡、光學系統(tǒng)等,其技術(shù)水平直接決定了激光雷達的性能和成本。中游整機廠負責激光雷達的設計、集成和生產(chǎn),是產(chǎn)業(yè)鏈中價值最高的環(huán)節(jié)。下游則涵蓋智能駕駛、機器人、安防等應用領(lǐng)域,為激光雷達提供了廣闊的市場空間。
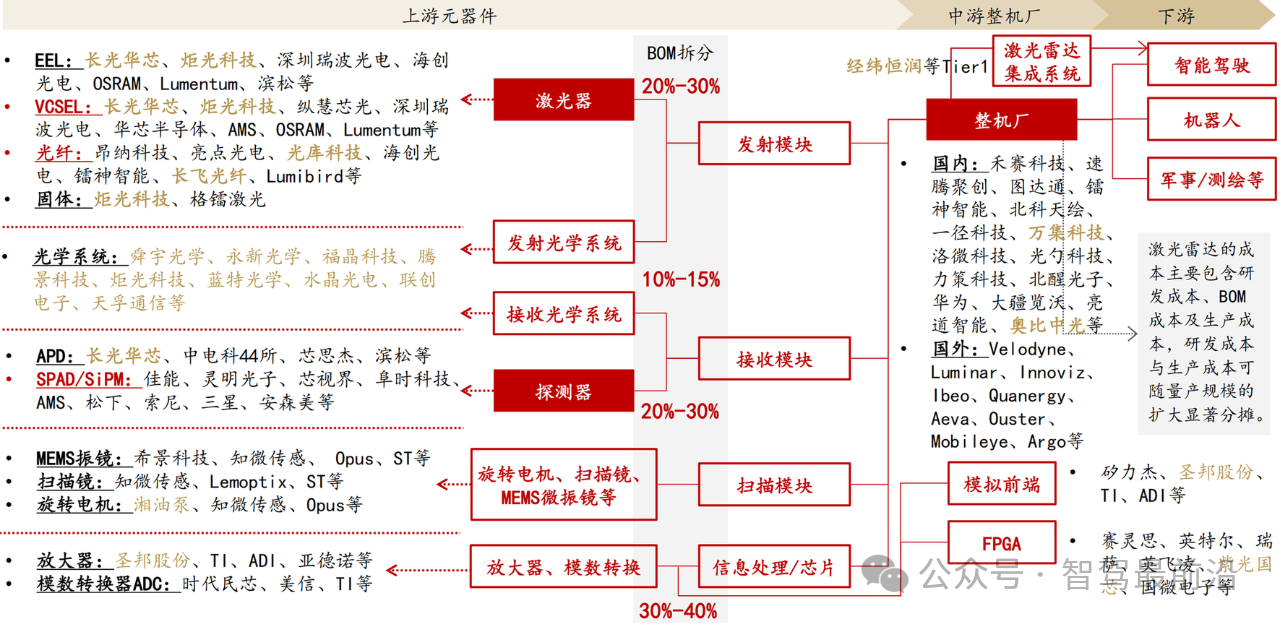
激光雷達產(chǎn)業(yè)鏈一張圖
國內(nèi)激光雷達廠商在產(chǎn)業(yè)鏈中已占據(jù)重要地位。禾賽科技、速騰聚創(chuàng)等企業(yè)通過自主研發(fā)和成本控制,不斷提升產(chǎn)品的市場競爭力。在上游元器件領(lǐng)域,國內(nèi)企業(yè)也逐步實現(xiàn)了技術(shù)突破,如炬光科技在半導體激光器領(lǐng)域的技術(shù)積累,以及靈明光子在SPAD探測器領(lǐng)域的創(chuàng)新,為整個產(chǎn)業(yè)鏈提供了強有力的技術(shù)支撐。
激光雷達的應用前景與挑戰(zhàn)
4.1應用前景
激光雷達的高精度感知能力,使其在智能駕駛中具有廣泛的應用價值。作為L3及以上自動駕駛的核心傳感器,激光雷達在長尾場景的處理能力上具備顯著優(yōu)勢。在城市復雜道路、高速公路合流段以及惡劣天氣條件下,激光雷達能夠提供高精度的三維環(huán)境數(shù)據(jù),為車輛的決策和規(guī)劃提供可靠支持。激光雷達還可用于非汽車領(lǐng)域的智能化場景。在工業(yè)自動化中,激光雷達用于設備定位和導航;在智慧城市中,激光雷達支持交通流量監(jiān)測和動態(tài)路徑規(guī)劃。這些新興應用場景的不斷涌現(xiàn),將為激光雷達市場的進一步擴展注入強大動力。
4.2技術(shù)與商業(yè)化挑戰(zhàn)
盡管激光雷達展現(xiàn)出巨大的市場潛力,其高成本和技術(shù)復雜性仍然是商業(yè)化應用的主要障礙。激光雷達的硬件成本主要集中在激光器、探測器和掃描模塊上,尤其是1550nm波長激光器和SPAD探測器,其生產(chǎn)工藝復雜且成本居高不下。此外,激光雷達對惡劣天氣的適應性較差,在雨雪條件下探測性能有所下降,這也限制了其在全場景中的應用能力。為應對這些挑戰(zhàn),行業(yè)正在積極推進技術(shù)創(chuàng)新和成本優(yōu)化。通過研發(fā)高集成度的ASIC和SoC芯片,激光雷達的硬件成本正在快速下降。同時,多傳感器融合技術(shù)的應用也在逐步彌補激光雷達在特定場景中的感知局限性,為其商業(yè)化落地創(chuàng)造了更有利的條件。
結(jié)論與展望
激光雷達作為汽車智能化發(fā)展的重要技術(shù)支撐,其技術(shù)迭代與商業(yè)化進程正在加速推進。通過固態(tài)化和芯片化路徑,激光雷達的成本和性能得以顯著優(yōu)化,為L3及以上級別自動駕駛的廣泛應用奠定了堅實基礎。同時,隨著FMCW、OPA等新技術(shù)的突破,激光雷達的技術(shù)瓶頸正逐步被克服,其應用場景也在不斷拓展。然而,激光雷達的全面普及仍需克服技術(shù)、成本和產(chǎn)業(yè)鏈協(xié)同等多重挑戰(zhàn)。在未來的發(fā)展中,通過加速技術(shù)創(chuàng)新、強化上下游合作,激光雷達將為汽車行業(yè)的智能化升級和社會的智慧化建設注入強勁動力。
審核編輯 黃宇
-
激光雷達
+關(guān)注
關(guān)注
968文章
4014瀏覽量
190215 -
自動駕駛
+關(guān)注
關(guān)注
784文章
13916瀏覽量
166776
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論