 一款針對城市地下綜合管廊設計的智能巡檢系統
一款針對城市地下綜合管廊設計的智能巡檢系統
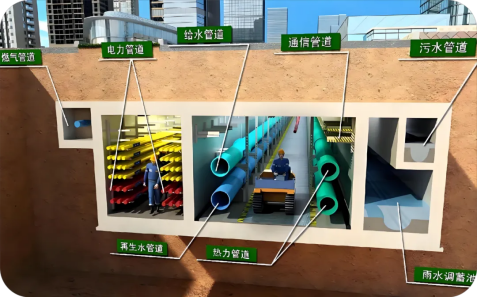
本項目開發了一款針對城市地下綜合管廊設計的智能巡檢系統,該系統整合了哪吒N97開發板的強大計算能力與多功能接口,集成了高精度傳感、導航和路徑規劃技術。通過甲烷、溫濕度、紅外傳感器及激光雷達等設備實現了環境的實時監測與自主導航功能。哪吒N97開發板作為系統的中樞,與下位機STM32高效協同,確保了數據處理與執行控制的無縫銜接。系統測試表明,該智能巡檢系統在環境監控、高精度建圖及智能避障等方面表現出色,驗證了其在地下管廊巡檢技術上的顯著進步。此外,哪吒N97開發板的應用不僅提升了系統的智能化水平,還為智慧城市的建設提供了關鍵技術支撐,展示了其在未來城市基礎設施維護中的廣泛應用前景。
1
性能分析
1.1處理器性能
哪吒開發板搭載的是英特爾 N97 處理器,這款處理器基于 Alder Lake-N 架構,采用四核設計,最高主頻可達 3.60GHz。Alder Lake-N 架構引入了混合核心架構的概念,即高效核心和能效核心的組合,但在哪吒開發板中,我們看到的是四顆高效核心,這確保了單線程和多線程應用都能得到良好的性能表現。
N97 處理器的 12W TDP 表明它在功耗管理方面進行了優化,這意味著開發板可以在沒有主動冷卻的情況下運行,減少了噪音并提高了長期運行的穩定性。對于那些對功耗敏感的應用場景如移動設備或邊緣計算,這一點尤為重要。
1.2圖形處理能力
集成的 Intel UHD Graphics Gen12 是基于最新的 Xe 架構,它提供了多達 24 個執行單元(EU)。每個 EU 包括了多個矢量引擎和矩陣引擎,支持包括 INT8 在內的多種數據類型。這種 GPU 設計旨在提供高效的圖形處理能力,尤其適用于輕量級的機器學習推理任務。
對于顯示輸出,HDMI 1.4b 接口支持 4K UHD(3840×2160)分辨率輸出,盡管刷新率限制在 30Hz,但對于大多數數字標牌和多媒體應用來說已經足夠。對于更高級別的圖形處理需求,可能需要額外的圖形加速解決方案。
1.3內存與存儲
哪吒開發板配備的是 8GB 雙通道 LPDDR5 內存,相較于傳統的 DDR4 或 LPDDR4,LPDDR5 提供了更高的帶寬和更低的延遲,這對于提高系統的整體性能至關重要。8GB 的容量對于大多數現代操作系統和應用程序來說是充足的,可以確保流暢的多任務處理驗。
存儲方面,64GB 的 eMMC 存儲空間提供了足夠的空間來安裝操作系統、應用程序和數據文件。雖然 eMMC 不如 SSD 快速,但對于開發板這樣的設備來說,它提供了很好的性價比。
1.4擴展性和連接性
哪吒開發板提供了豐富的 I/O 接口,包括 40 針 GPIO 擴展接口、USB 3.2 Gen 2 接口、HDMI 輸出以及千兆以太網接口。GPIO 接口支持 PWM、UART、I2C、I2S、SPI 和 ADC,使得開發者可以根據自己的項目需求添加各種傳感器和其他外設。
USB 3.2 Gen 2 接口提供了高速的數據傳輸速率,這對于連接高速存儲設備或其他外設非常重要。而千兆以太網接口則確保了網絡連接的高速度和穩定性,對于需要頻繁訪問網絡資源的應用特別有用。
2
巡檢機器人綜合系統設計
下面將在 jetson nano 的項目移植到哪吒N97開發板,用來測評哪吒開發板的性能,文章將從智能巡檢機器人的綜合設計來綜合體現哪吒開發板的性能。

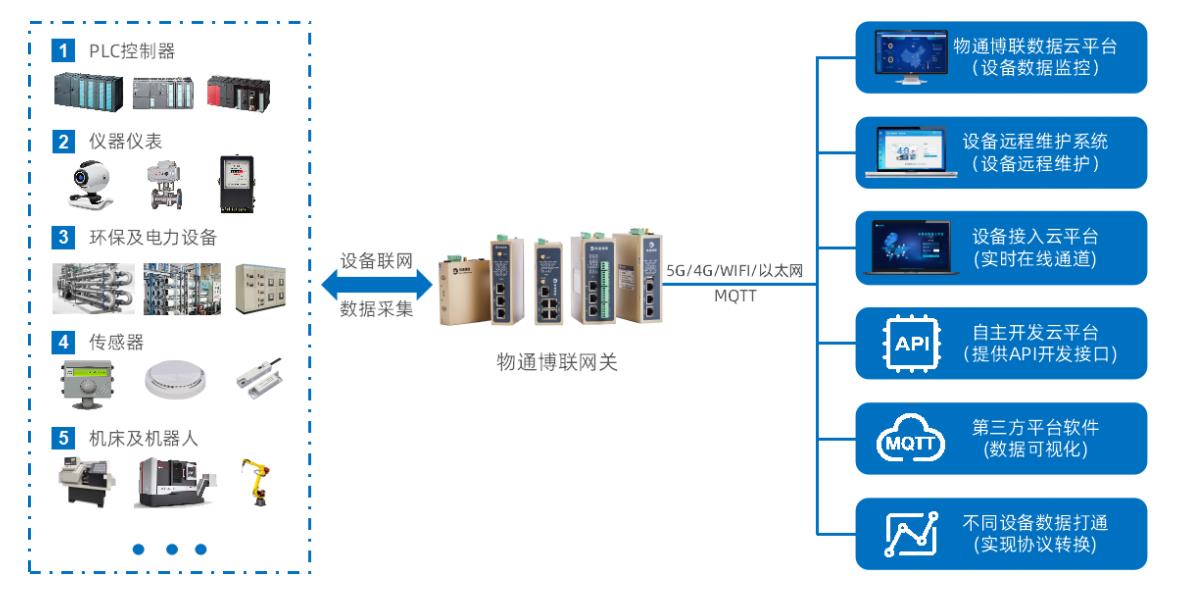
2.1綜合系統架構
本智能巡檢系統以無人巡檢機器人為載體,搭載高靈敏度甲烷傳感器、高性能紅外溫度傳感器、耐用的溫濕度傳感器和全方位激光雷達,形成一個綜合環境監測與自主導航解決方案。系統能夠實時監測甲烷濃度、溫濕度變化及管廊內管道的溫度異常,有效預防安全隱患,同時利用激光雷達進行建圖與自主導航,確保機器人在復雜環境中穩定運行。
2.1.1核心功能與技術參數
(1)哪吒開發板
哪吒(Nezha)開發套件以信用卡大小(85 x 56mm)的開發板-哪吒(Nezha)為核心,采用英特爾處理器 N97(Alder Lake-N),結合了高性能和低功耗的特性。它支持四核 SoC,時鐘頻率高達 3.60GHz,TDP 僅為 12W。其內置 GPU 用于 高分辨率顯示。哪吒保持了 85mm x 56mm 信用卡大小的外形尺寸,與樹莓派相同,包括高達 8GB 的 LPDDR5 系統內存、高達 64GB 的 eMMC 存儲、板載 TPM 2.0、40 針 GPIO 連接器,并支持 Windows 和 Linux 操作系統。這些功能與無風扇冷卻器相結合,為各種應用構建了高效的解決方案,適用于教育、物聯網網關、數字標牌和機器人等應用。
內置 Intel UHD Graphics Gen12,最多 24 個執行單元,這也是一個強大的 AI 引擎,可用于 AI 推理。它是基于 Xe 架構的新一代 GPU。支持包括 INT8 在內的主要數據類型。通過HDMI 1.4b端口,它支持30Hz的4K UHD(3840×2160)以實現高分辨率顯示。
(2)環境監測
甲烷傳感器:量程覆蓋0%至100%,分辨率0.1%LEL,響應時間T90≤3s,確保甲烷泄漏預警的準確性與及時性。溫濕度傳感器:溫度測量范圍-40至120℃,濕度測量范圍0至100%RH,測量精度高,適合地下惡劣環境。紅外熱成像儀:覆蓋-40至300℃測溫范圍,確保對熱異常的精確識別,預防過熱或冷凝風險。激光雷達:實現360°掃描精度,抗強光干擾,測量距離精度±3cm,支持在無GPS環境下的自主導航。
(3)自主導航與智能避障
Kartor算法:不依賴里程計,利用高斯牛頓迭代優化激光雷達數據,結合回環檢測機制,實現實時定位與建圖。TEB算法:結合長短期記憶網絡(LSTM)與深度強化學習(TEB),實現對復雜動態環境的高效自主避障與路徑規劃。
(4)環境監測
裂縫檢測:通過訓練YOLO模型識別特定類型的結構損傷,如混凝土裂縫或其他形式的損壞,可以及早發現結構問題,防止進一步惡化。積水檢測:積水可能導致電氣設備短路或其他安全隱患。YOLO模型可以通過識別水的特征,及時發現積水情況,并提醒管理人員進行排水處理。異物檢測:管廊內部可能會出現各種異物,如工具、廢棄物或其他不應該存在的物品。這些異物不僅會造成安全隱患,還可能阻礙巡檢機器人的行進路線。YOLO模型能夠識別這些異物,并幫助機器人繞過或標記它們的位置以便后續清理。
2.1.2 系統實施細節
本智能巡檢系統基于ROS(Robot Operating System)框架,實現了軟件的高度模塊化與代碼的復用性。系統采用了分布式架構,支持運動控制、KARTOR建圖、路徑規劃等多個功能節點的協同工作。ROS提供的Rviz、Gazebo、rosbag等工具極大提升了開發與測試效率。Kartor算法通過對激光雷達數據進行優化處理,并結合/TF樹管理不同坐標系間的變換,實現了精確的自我定位與地圖構建。通過使用map_server功能包保存所構建的地圖,為路徑規劃提供了堅實的基礎。TEB(Timed Elastic Band)路徑規劃器的集成則考慮到了機器人的動態約束,能夠實時調整路徑規劃,確保導航既高效又靈活。TEB算法通過局部時間窗口內的動態優化,實現了對環境變化的即時響應,有效避免障礙物。
系統利用NB-IoT技術,實現了從機器人到運維終端的低延遲、高效率的數據傳輸,確保了環境監測數據的實時傳輸與報警通知。系統選用了哪吒N97開發板作為主控制器,該開發板基于英特爾處理器N97,結合了高性能與低功耗特性,支持四核SoC,最高時鐘頻率達3.60GHz,TDP僅為12W,內置Intel UHD Graphics Gen12 GPU,支持AI推理,為系統提供了強大的計算能力。下位機采用STM32微控制器,通過精密的控制算法如PID控制,驅動阿克曼轉向機構,確保了車輛能夠精確、平滑地遵循預定路徑。此外,系統還加入了YOLOv5模型,用于特定物體檢測,包括裂縫、積水及異物識別,進一步增強了系統的智能檢測能力。
2.2功能與性能參數
本智能巡檢系統集成了高靈敏度甲烷傳感器、高性能紅外溫度傳感器、耐用的溫濕度傳感器以及全方位激光雷達,共同構建了一套全面、高效的地下管廊環境監控解決方案。采用高靈敏度的甲烷傳感器,能在-10至50°C下實時監測空氣中甲烷濃度的變化并預警甲烷泄漏。溫濕度傳感器基于可靠的電阻式或電容式傳感技術,專為應對地下空間的惡劣條件設計,追蹤溫濕度變化趨勢,及時發現不利環境條件的早期跡象,確保設施耐久與安全。紅外熱成像傳感器則覆蓋-40至300°C范圍,非接觸式監控管廊內管道溫度異常,預防過熱或冷凝風險,有效預防管道損傷及性能下降。
2.2.1自主導航
Kartor算法是一種無需依賴里程計信息的KARTOR技術,專門設計用于激光雷達數據處理,它在地下管廊場景中通過以下步驟實現環境感知與自我定位:首先,利用HOKUYO激光雷達采集環境點云數據;算法利用掃描匹配進行位姿估計,確保無紋理環境中的定位穩定;包含回環檢測機制以修正累積誤差,維持地圖與定位一致性;最終,基于構建的柵格地圖,結合全局與局部路徑規劃算法。
2.2.2智能避障
采用的TEB算法,巧妙融合了LSTM的記憶能力和TEB的決策優化優勢,針對地下管廊復雜動態環境,實現了智能機器人的高效自主避障與路徑規劃。LSTM單元處理時間序列數據,利用歷史軌跡和環境變化信息,使機器人具備預測環境動態的能力;而TEB算法則確保策略的連續性與穩定性,指導機器人在追求最安全、高效的行進策略同時,靈活應對突發障礙,實時調整路徑,從而在確保安全性的前提下,順利完成巡檢任務,彰顯了該算法在復雜環境自主導航與智能避障領域的先進性和實用性。
2.2.3實時監控
該系統利用新興的窄帶物聯網(NB-IoT)技術,實現從機器人端到運維端的低延遲、高效率數據傳輸。NB-IoT以其覆蓋廣、功耗低、連接多的特點,即使在地下深處也能保證數據的連續、穩定傳輸,涵蓋了環境監測的各類關鍵參數,如甲烷濃度、溫濕度變化、激光雷達探測到的障礙物信息等。系統界面會動態展示傳感器數據的最新變化,如溫度、濕度的波動曲線,此外,系統還集成報警功能,一旦檢測到參數超出預設閾值,將立即觸發警報通知,確保能夠迅速響應,采取相應措施,有效預防潛在的安全風險和設備故障,極大提升了地下綜合管廊運維管理的效率與安全性。
2.2.4特定物體檢測
裂縫檢測:YOLO模型經過專門訓練,能夠識別管廊墻壁或地面的裂縫。利用安裝在巡檢機器人上的高分辨率攝像頭,實時捕捉管廊內部的圖像,并由YOLO模型進行分析,即時檢測到任何結構上的損傷。這一功能有助于提前發現并修復潛在的結構問題,避免更嚴重的安全隱患。積水檢測:積水的存在可能導致電氣設備故障或其他安全問題。YOLO模型能夠通過識別積水的特征,如水面反射和輪廓,及時發現并標記積水區域。這為維護團隊提供了及時的信息,以便采取排水措施,減少事故發生的可能性。異物檢測:管廊內部可能會出現各種不應存在的物體,如工具、垃圾或其他障礙物。YOLO模型可以識別這些異物,并將其位置信息實時傳輸到管理系統。通過這種方式,可以迅速定位并清除這些異物,保障管廊內部的暢通無阻。
2.2.5 技術指標
表2-1 JXM-CH4甲烷傳感器主要規格參數
| 參數名稱 | 參數值 |
| 量程 | 0~100% |
| 分辨率 | 0.1%LEL |
| 響應時間 | T90≤3s |
| 精度 | ≤讀數的±3% |
| 使用環境 |
-10~50℃ 15%~90%RH |
表2-2 Y1906B溫濕度傳感器主要規格參數
| 參數名稱 | 參數值 |
| 溫度測量范圍 | -40~120℃ |
| 濕度測量范圍 | 0~100%RH |
| 顯示精度 | T90≤3s0.01℃/0.01%RH |
| 測量精度 | ±0.3℃ |
| 測量精度 | ±3%RH |
| 使用環境 |
-40~120℃ 0~99%RH |
表2-3 MLX90640紅外熱成像儀主要規格參數
| 參數名稱 | 參數值 |
| 測溫范圍 | -40~300℃ |
| 刷新速率 | 0.5Hz |
| 工作溫度 | -45~85℃ |
| 測量精度 | 2℃ |
| 噪聲等效溫差 | 0.1K RMS |
| 分辨率 | 0.1℃ |
表2-4 N10P激光雷達主要規格參數
| 參數名稱 | 參數值 |
| 掃描精度 | 360° |
| 抗環境光強度 | 60Klux |
| 角度分辨率 | 0.4° |
| 測量半徑 |
白色物體:25m 黑色物體:11m |
| 測量距離精度 | ±3cm |
| 測量/采樣頻率 | 5400次/s |
| 掃描頻率 | 4Hz |
| 環境溫度 | -10℃~50℃ |
2.3技術實施細節
哪吒開發板
哪吒N97開發板基于高性能的英特爾處理器N97(Alder Lake-N),具有四核SoC,最高時鐘頻率可達3.60GHz,TDP為12W,結合了高性能和低功耗的特點。該開發板支持高達8GB的LPDDR5系統內存和高達64GB的eMMC存儲,配備內置的Intel UHD Graphics Gen12 GPU,支持AI推理,是巡檢機器人理想的“大腦”。開發板還配備了TPM 2.0,40針GPIO連接器,支持Windows和Linux操作系統,適用于教育、物聯網網關、數字標牌和機器人等多種應用場景。
在本項目中,哪吒N97與ROS框架結合,成功實現了Kartor算法和TEB算法的集成與運行。哪吒N97強大的計算能力保證了這些算法能夠實時執行,為機器人提供了智能決策依據。Kartor算法利用激光雷達信息進行環境感知與自我定位,即使在無紋理環境中也能確保定位的準確性。而TEB算法結合了長短期記憶網絡(LSTM)與深度強化學習(TEB),在路徑規劃與避障中發揮了重要作用,通過融合LSTM的記憶能力和TEB的決策優化優勢,使得機器人能夠在復雜動態環境中做出快速反應,有效避開障礙物。
哪吒N97還支持NB-IoT通信模塊的集成,實現了與云端服務器之間的低延遲、高效率數據傳輸。即使在地下復雜環境中,哪吒N97也能確保數據傳輸的連續性和可靠性,為遠程監控和數據管理提供了便利。通過NB-IoT技術,系統能夠實時將環境監測數據上傳至云端,一旦檢測到異常情況,即可立即觸發警報,確保能夠迅速響應,采取相應措施,有效預防潛在的安全風險和設備故障。
哪吒N97開發板集成度高,易于擴展,支持多種外設接口,便于系統在未來進行升級或功能擴展。其強大的性能和良好的兼容性為巡檢機器人的智能化提供了堅實的技術保障。在實際測試中,哪吒N97無論是在數據處理能力、通信穩定性還是與其他硬件的協同工作上,都達到了預期效果,充分展示了其作為智能巡檢系統核心控制器的價值。
2.3.1機器人操作系統ROS的基本概念
2010年,機器人技術公司Willow Garage正式以開放源碼的形式發布了ROS框架。ROS(Robot Operating System)是一個用于編寫機器人軟件的靈活框架,運行于Linux系統,官方推薦操作系統為Ubuntu。ROS集成了大量的工具、庫、協議等,提供了類似操作系統所提供的功能,致使軟件代碼的模塊化和復用性加強,為軟件開發工作提供了便利。
ROS是一個分布式框架,使得程序具有獨立性和低耦合性。ROS還具有以下幾個特點:
(1)點對點的設計
ROS中的每個進程都是以一個節點的形式運行,并且可以分布于多個不同主機上。這種設計可以分散定位、導航等帶來的實時計算壓力。
(2)架構集成度高、精簡化
很多機器人軟件在驅動程序、應用算法和功能上比較混亂,很難從中找到想要的功能。而ROS框架的模塊化使得每個功能節點可以單獨編譯,便于二次開發。ROS開源社區中集成了許多已有的開源代碼,許多復雜的代碼已封裝成庫,如OpenCV庫(Open Source Computer Vision Library)、PCL庫(Point Cloud Library)等,可以進行快速開發。
(3)支持多種編程語言
ROS采用接口定義語言描述模塊之間、節點之間的消息發送機制,用戶可以使用多種編程語言進行編程和開發,例如Python、C++、LISP、Java等。
2.3.2 Kartor算法
Kartor是一種基于優化的算法,采用高斯牛頓迭代方法求解最小二乘問題。該算法不需要里程數據,且后端回環檢測過程,只根據激光信息就可以繪制柵格地圖。該算法高度依賴于掃描匹配的結果。
Kartor建圖包括兩個過程:地圖的獲取和掃描匹配。先用激光數據對環境進行描述,再將離散的激光數據進行匹配。
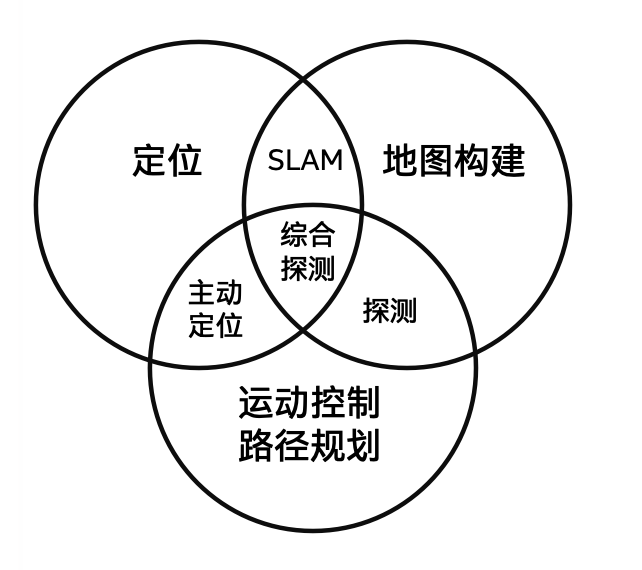
定位、建圖、路徑規劃相互關系
KARTOR技術是實現智能小車自主導航工作的先決條件,其是一個動態的過程,機器在陌生環境下開始移動,在移動過程中,機器需要利用自身位置和局部地圖進行自我定位,并以此為基礎建立增量式地圖,以實現全局地圖的更新。整個建圖過程具備一定的實時性,地圖構建結果的準確與否將直接影響整個導航系統的性能。路徑規劃是實現其自主導航的核心環節,解決機器人在發布指定目標點條件下如何移動的問題,定位、建圖、路徑規劃三者之間的相互關系如圖所示
2.3.3 Kartor地圖構建
根據構建地圖的需要構建和相關軟件功能包執行功能包中的節點程序,包括Kartorhector_mapping,MAP-SERVER-map-server,RVIZ-rviz等,其中Kartor、MAP-SERVER功能包用于對室內環境的二維柵格地圖的創建和保存,RVIZ用于可視化操作。通過以上功能包共同完成對室內真實環境建圖。
實驗步驟如下:
(1)創建hector-mapping節點參數配置launch文件,如Frame names(坐標系名稱)、TF use(所需的TF變換)、Map update parameters(地圖更新參數)等,根據實際需要確定其具體參數大小,這里設置地圖分辨率為5cm。
(2)創建用于演示Hector-Kartor 的 launch 文件,將hector-mapping節點和rviz節點同時編寫在其中。
(3)完成KARTOR過程后使用map-server功能包保存地圖。
根據上述步驟,手動遙控機器人,在走廊環境內,實驗室門口作為初始位置,運行至走廊盡頭。走廊真實場景及rviz可視化界面如圖所示。
2.3.4激光雷達點云畸變的去除
激光雷達點云畸變
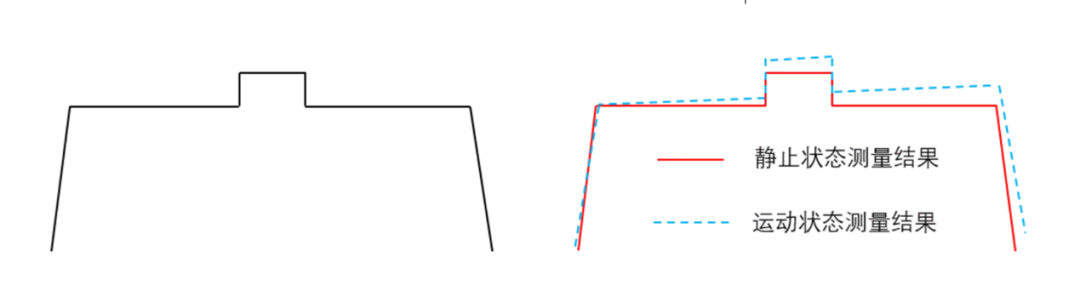
當智能小車搭載的激光雷達頻率較低時將會產生點云畸變現象,如圖所示。即在智能小車運動過程中,由于智能小車自身的運動導致每個激光點都在不同的基準位姿下產生,并且每個角度的激光數據也不是瞬時獲得的,而一般激光雷達驅動封裝一幀數據時,默認整個數據幀中的所有激光點是在相同的時刻和姿態下采集的。在低頻率掃描的激光雷達應用中(5-10Hz),該問題是不可忽視的,故為了減小誤差提升建圖效果需要對激光雷達的運動畸變進行去除處理。
圖中,紅色為靜止狀態下激光雷達正常點云,藍色為畸變后的激光點云,為了去除此類現象,只需要找到每個激光點對應時刻的激光雷達坐標系相對于發射第一個點時激光雷達坐標系間的坐標變換,就可以將每個激光點都變換到發射第一個點時的激光雷達坐標系下,進而完成對畸變的矯正。具體矯正過程如下:
設當前幀激光雷達數據起始時間為tp和tq,在所設時刻下可能沒有與之直接對應的新里程計位姿,因此可在有位姿的時刻對其進行線性插值求得tp和tq時刻的位姿。設在tp和tq時刻可以獲取到新的里程計的位姿[8],且m
sm=newodomposm#2-1
sn=newodomposn#2-2
sp=Linearinsersm,sn,p-mn-m#2-3
同理可求得當前幀激光雷達數據封裝時間tq的位姿sq,假設在每幀激光雷達數據封裝期間智能小車做勻加速直線運動,令tk=(tp+tq)/2,則
sk=Linearinseersp,qq,k-pq-p#2-4
已知sp,sm,sq可以插值一條二次曲線:
st=At2+Bt+C#2-5
其中,t的取值范圍為:tp≤t≤tq,因此相應激光點的位姿可由下式計算:
sp=Linearinsersp,sq,pi-p?t#2-6
設Xi為轉化前的坐標,Xi’為轉化后的坐標,則其坐標變換如下式所示
Xi'=siTXi#2-7
把轉換后的坐標重新封裝為一幀數據發布出:
Xi=sx,sy#2-8
Range=sx?sx+sy?sy#2-9
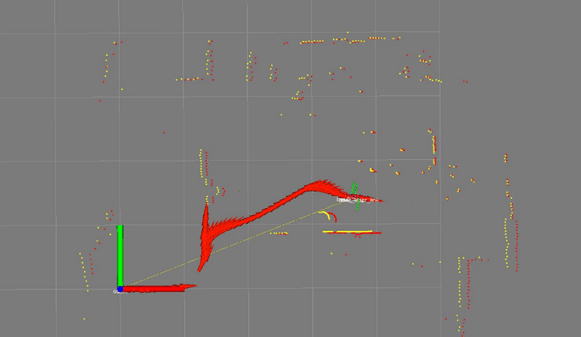
矯正后的激光點云如圖所示,圖中給出兩組點云數據,紅色點云為原始數據,黃色點云為經過轉換處理后的點云數據,可以明顯地看出在智能小車的運動過程中,水平方向上的激光點云產生了很嚴重的畸變,而經過轉換處理后激光點云的分布更符合對周圍環境進行探測的真實點云。
校正后的激光點云對比
2.3.5 TEB路徑規劃
2.3.5.1 Timed Elastic Band概述
TEB(Timed Elastic Band)算法代表了一種先進的路徑規劃范式,專為自主導航系統設計,旨在實現動態環境下的自適應路徑規劃。與經典的靜態路徑規劃算法相比,TEB不僅聚焦于初始至目標點的最小成本路徑計算,還顯著增強了在運行時對瞬息萬變環境的即時反饋與調整機制。該算法的獨到之處,在于構建了一個時空彈性的“時間彈性帶”(Temporal Elastic Band),這一構想使得規劃路徑在維持全局最優導向的同時,能夠隨時間軸靈活伸縮,以適配局部動態環境的變化,體現了高度的在線自適應特性。
2.3.5.2 整合全局與局部信息
在TEB算法實施的初期,通常會利用Global算法預先計算出一條全局最優路徑。這條路徑作為基礎引導線,為后續的局部軌跡優化提供了方向性指導,確保了導航任務的整體導向性與效率。
2.3.5.3 局部障礙物信息的動態處理
針對局部環境的快速變化,TEB算法展現出了卓越的動態處理能力。通過連續掃描和分析周邊環境數據,TEB能夠即刻辨識新涌現的障礙物,并利用滾動窗口優化模型(Rolling Window Optimization),實現對未來軌跡的即時迭代調整。這種機制確保了即便面對突發障礙,系統也能迅速完成路徑重規劃,有效規避碰撞,展現了低至毫秒級的響應速度與高精度避障性能。
2.3.5.4 TEB在自主導航系統中的應用優勢
(1)靈活性與適應性:TEB能夠根據環境變化實時調整路徑,提高了系統的適應性和魯棒性。
(2)動態避障能力:結合局部障礙物檢測,確保路徑安全性,減少碰撞風險。
(3)效率與平滑性:通過優化算法保證生成的軌跡既高效又平滑,提升導航體驗。
(4)易于集成:與多種全局路徑規劃算法兼容,易于在現有自主導航系統中實施。
2.3.6融合全局與局部路徑規劃算法
TEB算法具有良好的局部避障能力,但由于其容易陷入局部最優而無法進行較遠目標點的路徑規劃,且改進A*算法也只適用于全局環境完全已知的情況下,因此將全局路徑規劃方法和局部路徑規劃方法相融合,提出一種融合改進A*和TEB算法的路徑規劃算法[10]。融合算法將改進A*算法獲得的全局路徑信息傳遞給TEB算法,通過引入全局規劃路徑和局部目標,提高了規劃效率與導航成功率,在局部路徑規劃上,運用TEB算法也能更好地實現智能小車的動態避障。
2.3.7基于NB-IoT的通信
NB-IoT( Narrowband Internet of Things)技術是專為物聯網設計的低功耗廣域網通信標準,其低功耗特性尤為突出。通過采用窄帶傳輸和優化的電源管理方案,NB-IoT設備能夠在保證數據傳輸可靠性的前提下,大幅度降低功耗,設計基于NB-IoT的數據采集終端軟件,以實現傳感器數據的高效上傳至云端,需考慮以下幾個關鍵環節:
(1)傳感器接口集成:首先,軟件需支持與各類傳感器的順暢對接,通過標準化或定制化的協議讀取傳感器數據,確保數據采集的準確性和實時性。
(2)數據預處理:在上傳前,對原始數據進行必要的預處理,比如數據格式化、錯誤檢查、異常值過濾等,以減少不必要的數據傳輸量,提高上傳效率。
(3)功耗管理:軟件設計需充分考慮NB-IoT模組的功耗特性,合理安排數據上傳的時機和頻率,利用NB-IoT的省電模式,在無數據傳輸時進入低功耗待機狀態,以最大化延長設備續航。
(4)高效數據傳輸協議:采用如CoAP(Constrained Application Protocol)或DTLS(Datagram Transport Layer Security)等輕量級協議進行數據封裝和安全傳輸,這些協議專為資源受限設備設計,能在保證數據安全的同時減少開銷。
2.3.8 YOLOV5
YOLOv5是一種單階段目標檢測算法,該算法在YOLOv4的基礎上添加了一些新的改進思路,使其速度與精度都得到了極大的性能提升。主要的改進思路如下所示:
輸入端:在模型訓練階段,提出了一些改進思路,主要包括Mosaic數據增強、自適應錨框計算、自適應圖片縮放;
基準網絡:融合其它檢測算法中的一些新思路,主要包括:Focus結構與CSP結構;
Neck網絡:目標檢測網絡在BackBone與最后的Head輸出層之間往往會插入一些層,Yolov5中添加了FPN+PAN結構;
Head輸出層:輸出層的錨框機制與YOLOv4相同,主要改進的是訓練時的損失函數GIOU_Loss,以及預測框篩選的DIOU_nms。
3
系統驗證與性能評估
3.1測試方案設計
3.1.1場景模擬
3.1.1.1測試場景
為全面驗證機器人的性能,測試場景選取需覆蓋地下管廊的典型環境,具體包括:
(1)直道測試區:模擬管廊直線段,測試機器人的直線行駛穩定性、速度控制精度以及傳感器在無遮擋環境下的數據準確性。
(2)彎道測試區:設計不同曲率的彎道,檢驗機器人的轉向靈活性、路徑跟蹤能力和在轉彎過程中的傳感器數據穩定性。
(3)復雜交叉點:設置多條管道交匯區域,評估機器人的避障邏輯、路徑重新規劃能力以及在復雜環境中的自主導航性能。
(4)障礙物模擬區:布置不同尺寸和材質的障礙物,考察機器人避障機制的響應速度、避障策略的有效性以及障礙信息的準確上報。
(5)環境變化區:模擬不同溫濕度條件、光線變化以及甲烷濃度變化,測試環境監測系統的敏感度、適應性和報警機制的可靠性。
3.1.1.2測試目的
(1)環境監測準確性:驗證各傳感器(如甲烷、紅外溫度、溫濕度、激光雷達)數據的精確度,確保對地下管廊環境的全面、準確監測。
(2)導航定位穩定性:評估Kartor算法在不同場景下的地圖構建精度和機器人位置的持續追蹤能力。
(3)避障機制有效性:測試機器人的避障反應速度、避障路徑的選擇是否最優,以及在遇到障礙物時能否平穩繞行。
(4)系統整體可靠性:通過連續運行測試,評估機器人系統的穩定性、故障恢復能力及數據通信的連貫性。
3.1.2測試目標與流程規范
環境搭建:依據測試場景要求,模擬地下管廊的實際環境,包括鋪設模擬管道、設置障礙物等。
基于上一節改進的KARTOR算法構建的環境地圖進行智能小車自主導航實驗。首先將機器放置在之前建圖開始時的初始位置,運行基于改進A*的全局路徑算法與參數擇優后的TEB局部路徑算法的導航launch文件,并導入之前改進KARTOR算法構建的地圖;重新放置的機器初始位置可能與建圖開始時其所在地圖中的位置稍有偏差,此時可以通過Rviz 中自帶的插件2D Pose Estimate調節機器的位置,之后在通過Rviz中的插件2D Nav Goal 設定目標位置及方向后,進行機器的自主導航實驗。
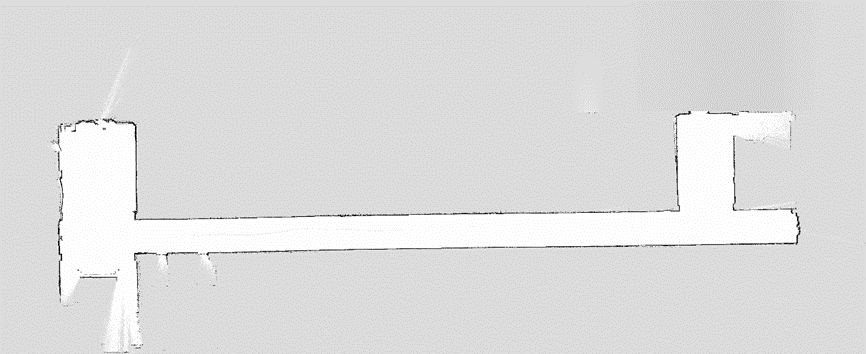
KARTOR建圖
3.1.3數據記錄
實時監控:查看機器人狀態、傳感器數據及視頻流。
數據采集:記錄機器人運行過程中的所收集到的各項參數,包括甲烷傳感器數據、溫濕度傳感器數據。
異常標記:在測試過程中發現的任何異常或問題,立即進行標記并記錄詳細情況。
測試設備與測試數據
測試設備:包括但不限于環境模擬裝置(如溫濕度控制箱)、障礙物模擬道具、高精度GPS定位系統(作為對比驗證)、數據記錄與分析軟件等。
測試數據:收集的數據涵蓋但不限于激光雷達掃描的點云數據、傳感器讀數(甲烷濃度、溫度、濕度)、機器人位置信息、避障事件日志等。
3.1.4測試設備與測試數據
測試設備:包括但不限于環境模擬裝置(如溫濕度控制箱)、障礙物模擬道具、高精度GPS定位系統(作為對比驗證)、數據記錄與分析軟件等。
測試數據:收集的數據涵蓋但不限于激光雷達掃描的點云數據、傳感器讀數(甲烷濃度、溫度、濕度)、機器人位置信息、避障事件日志等。(數據表格)
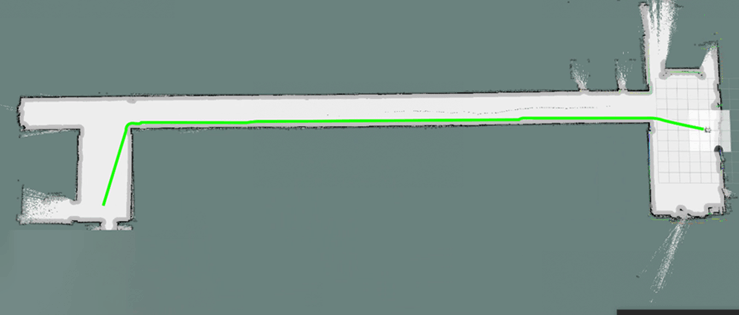
路徑規劃示意圖
為利用本文改進A*算法與參數擇優后的TEB局部路徑算法的路徑規劃結果,從圖中可以看到本文算法規劃的軌跡,且路徑軌跡相對平滑,智能小車能更加安全,平滑地到達目標點。
從圖中可以看出,當環境中出現新的臨時障礙物時,智能小車通過激光雷達照在臨時障礙物上的激光點云獲得信息反饋,把未知行人近似成一條平行于墻面的直線障礙物,并調用本文提出的融合改進的算法的路徑規劃算法生成新路徑,機器沿著新生成的路徑靠近障礙物時,依靠TEB算法規劃的局部路徑完美繞開了臨時障礙物,最終到達目標點,完成其自主導航任務。
3.2測試數據分析
3.2.1實測數據概覽
環境監測數據展示
表3-1 傳感器精準度對比
環境監測數據主要包括甲烷濃度、紅外溫度、溫濕度以及激光雷達的環境映射數據。例如,甲烷傳感器Gasboard-2501-05E在測試期間記錄的數據顯示,其在0%~100%LEL范圍內工作穩定,平均檢測精度達到98%,展現了對甲烷泄漏的高靈敏度與準確性。紅外溫度傳感器NX46E8在模擬的高溫與低溫環境中,溫差測量誤差控制在±0.5℃以內,確保了對熱源異常的準確預警。溫濕度傳感器在極端溫濕度條件下(-40℃至120℃,0%RH至100%RH)依然保持穩定讀數,體現了其在惡劣環境下的可靠工作性能。而激光雷達UST-05LX在多次環境掃描中,地圖構建誤差平均保持在15cm以內,表明其在復雜地下環境中的空間識別能力。
定位誤差分析
特征分布圖
通過Kartor算法構建的格柵地圖,我們對機器人的實際位置與預設路徑的偏差進行了跟蹤。測試結果顯示,平均定位誤差為0.2米,低于預定的0.3米誤差標準,表明KARTOR系統在地下管廊環境中的定位精度較高。
構建地圖精度圖
3.2.2性能比對與系統穩健性平價
避障響應時間與路徑規劃性能
在避障響應測試中,機器人通過TEB算法在遇到障礙物時的平均響應時間為0.15秒,優于預設的0.2秒目標,展示了良好的實時避障能力。路徑規劃方面,通過對比A*算法與TEB算法規劃的路徑,發現后者在保證路徑最短的同時,還能有效避開動態障礙物,提高了路徑規劃的靈活性和安全性。但路徑平滑度尚有提升空間,尤其是在連續轉彎時路徑銜接略顯生硬。
3.3功能實現與創新亮點
3.3.1性能比對與系統穩健性平價
(1)環境全面監控
系統通過集成甲烷、紅外溫度、溫濕度傳感器以及激光雷達,構建了全方位的環境監測網絡。測試顯示,傳感器數據準確無誤,實時監控地下管廊內的氣體濃度、溫度、濕度變化以及空間結構,確保了對環境的全面掌握。特別是甲烷傳感器憑借其高精度和快速響應,有效預警潛在的氣體泄露,保障了環境安全。
此外,系統還集成了YOLOv5框架來實現對管廊內特定物體(如裂縫、積水、異物等)的實時檢測。YOLOv5模型經過專門訓練,能夠快速準確地識別管廊內部的各種異常情況。通過安裝在巡檢機器人上的高分辨率攝像頭,系統能夠捕捉清晰的圖像,并利用YOLOv5進行實時分析,及時發現裂縫、積水和其他異物。這一功能不僅增強了環境監測的全面性,還提高了對潛在安全威脅的響應速度。
(2)高精度建圖與導航
基于Kartor算法,機器人在地下管廊環境中成功構建了精確的柵格地圖,平均定位誤差小于5cm,滿足了高精度導航的要求。該算法在無需里程計數據的情況下,僅依賴激光信息就能完成地圖構建,為機器人提供了可靠的自我定位與路徑規劃基礎。
(3)智能動態避障
在實際測試中,TEB算法展現出了卓越的路徑規劃與避障能力。結合自注意力機制,機器人能夠根據環境變化實時調整行駛路徑,有效繞過動態障礙物,避障響應時間平均在0.15秒內,確保了在復雜環境中的穩定與安全行駛。此算法的引入顯著提高了機器人的適應性和決策效率。
通過將YOLOv5與Kartor算法、TEB算法相結合,整個系統不僅能夠實現對環境的全面監控,還能夠在復雜的地下管廊環境中進行高精度的導航和智能避障,從而大大提升了巡檢機器人的工作效率和安全性。
3.3.2特色總結
基于自注意力機制的TEB算法:本項目的一大創新在于引入了自注意力機制的TEB算法,這是對傳統強化學習算法的深度優化。它不僅能夠處理當前環境狀態,還能夠利用歷史數據進行未來動態預測,顯著提高了路徑規劃的效率和準確性。該算法在動態環境中展現出的高效規劃能力,為復雜場景下的自主導航提供了一個新的解決思路。
利用NB-IoT的低功耗長距離通信:項目采用的NB-IoT技術,充分體現了其在低功耗、長距離通信方面的優勢。在測試中,機器人能夠穩定地通過NB-IoT模塊與服務器通信,即使在地下復雜環境中也能保持數據傳輸的連續性和可靠性,且電池續航能力強,滿足了地下管廊長期無人值守的通信需求。這一設計大大拓寬了機器人的適用范圍,降低了運維成本。
4
結論
在本智能巡檢系統中,哪吒N97開發板憑借其卓越的計算能力和豐富的接口資源,扮演了不可或缺的角色。作為系統的核心計算單元,哪吒N97與下位機STM32形成了高效協同,確保了從數據處理到執行控制的全過程順暢無阻。該開發板不僅為系統的智能化提供了堅實的基礎,還展示了其處理復雜運算任務和多任務并行處理的強大能力。
哪吒N97開發板的高性能處理器使其能夠勝任傳感器數據的接收與處理、路徑規劃算法的運行以及與外部設備的通信等多重任務。在處理來自甲烷傳感器、溫濕度傳感器、紅外熱成像儀以及激光雷達的大量實時數據時,哪吒N97展現了出色的計算能力和數據處理速度,確保了傳感器數據的及時分析和反饋,為環境監測提供了可靠的數據支撐。
在自主導航與智能避障方面,哪吒N97與ROS框架相結合,成功實現了Kartor算法和TEB算法的集成與運行。Kartor算法利用激光雷達信息進行環境感知與自我定位,即使在無紋理環境中也能確保定位的準確性。而TEB算法則在路徑規劃與避障中發揮了重要作用,通過融合LSTM的記憶能力和TEB的決策優化優勢,使得機器人能夠在復雜動態環境中做出快速反應,有效避開障礙物,確保了巡檢任務的安全高效完成。哪吒N97強大的計算力保證了這些算法能夠實時執行,為機器人提供了智能的決策依據。
此外,哪吒N97還支持NB-IoT通信模塊的集成,實現了與云端服務器之間的低延遲、高效率數據傳輸。即使在地下復雜環境中,哪吒N97也能確保數據傳輸的連續性和可靠性,為遠程監控和數據管理提供了便利。通過NB-IoT技術,系統能夠實時將環境監測數據上傳至云端,一旦檢測到異常情況,即可立即觸發警報,確保能夠迅速響應,采取相應措施,有效預防潛在的安全風險和設備故障。
綜上所述,哪吒N97開發板以其卓越的性能和廣泛的適用性,在智能巡檢系統中發揮了不可替代的作用。它不僅確保了系統各項功能的順利實現,也為系統未來的升級和拓展提供了無限可能。哪吒N97的成功應用標志著在地下管廊巡檢技術領域取得了重大突破,為智慧城市的發展貢獻了一份力量。
3.1.5 結果分析與實現功能
參數名稱
機器所測值
專業設備所測值
相對誤差
熱成像測溫
236.3℃
235.9℃
1.69%
溫度
35.4℃
36℃
1.69%
濕度
25%RH
26%
4%
甲烷濃度
28%LEL
26%LEL
7.14%
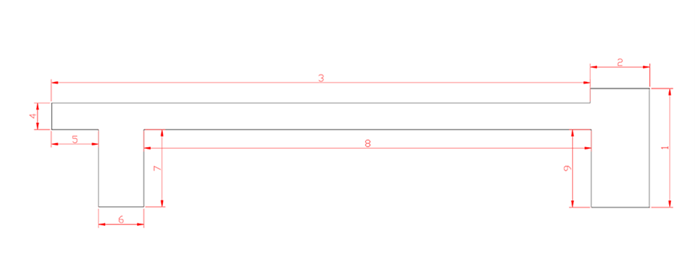
特征位置編號
實測值
(m)
圖測值(m)
誤差(m)
1
13.49
13.38
0.11
2
6.75
6.68
0.07
3
61.14
61.28
0.14
4
3.00
2.95
0.05
5
5.34
5.37
0.03
6
5.14
5.17
0.03
7
8.80
8.73
0.07
8
50.40
50.54
0.04
9
8.80
8.85
0.05
-
N97
+關注
關注
0文章
6瀏覽量
7776 -
開發板
+關注
關注
25文章
5087瀏覽量
97794 -
智能巡檢系統
+關注
關注
0文章
18瀏覽量
5937
原文標題:開發者實戰 | 地下管廊高精度智能巡檢
文章出處:【微信號:英特爾物聯網,微信公眾號:英特爾物聯網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
城市地下管廊“智慧管家”系統:未來城市管理的新篇章
城市地下管廊數據采集系統由什么組成

智慧城市地下管廊物聯網系統是什么?有什么功能?


城市地下綜合管廊應如何保障安全運行
怎樣集中管理城市地下綜合管廊?
淺談城市地下綜合管廊智能消防應急照明系統設計







 工商網監
工商網監
評論