 CANopen轉EtherCAT網關連接伺服驅動
CANopen轉EtherCAT網關連接伺服驅動
在現代工業自動化領域,CANopen和EtherCAT是兩種常見的通信協議,各自在不同的應用場景中發揮著重要作用。然而,隨著工業自動化系統的日益復雜化,不同設備間的通信需求也變得多樣化。因此,如何實現不同協議設備之間的無縫連接成為工程師們面臨的一個關鍵問題。本文將探討開疆智能CANopen轉EtherCAT網關KJ-ECAT-CANP的應用,以及其在伺服驅動控制中的應用案例。

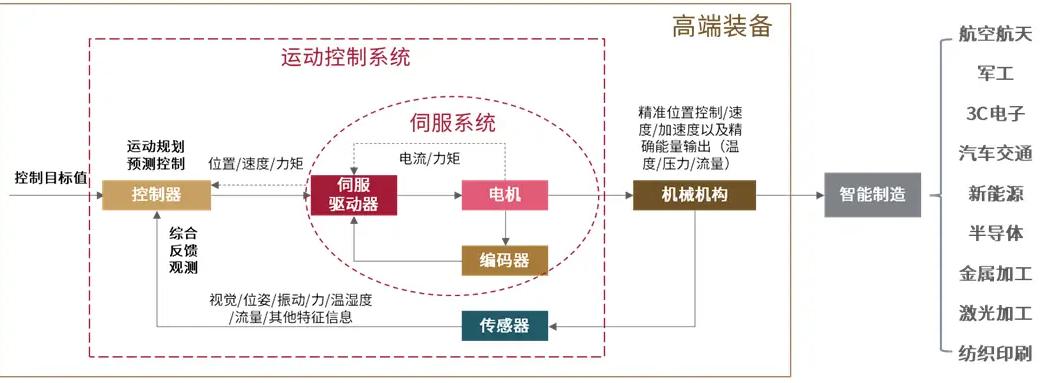
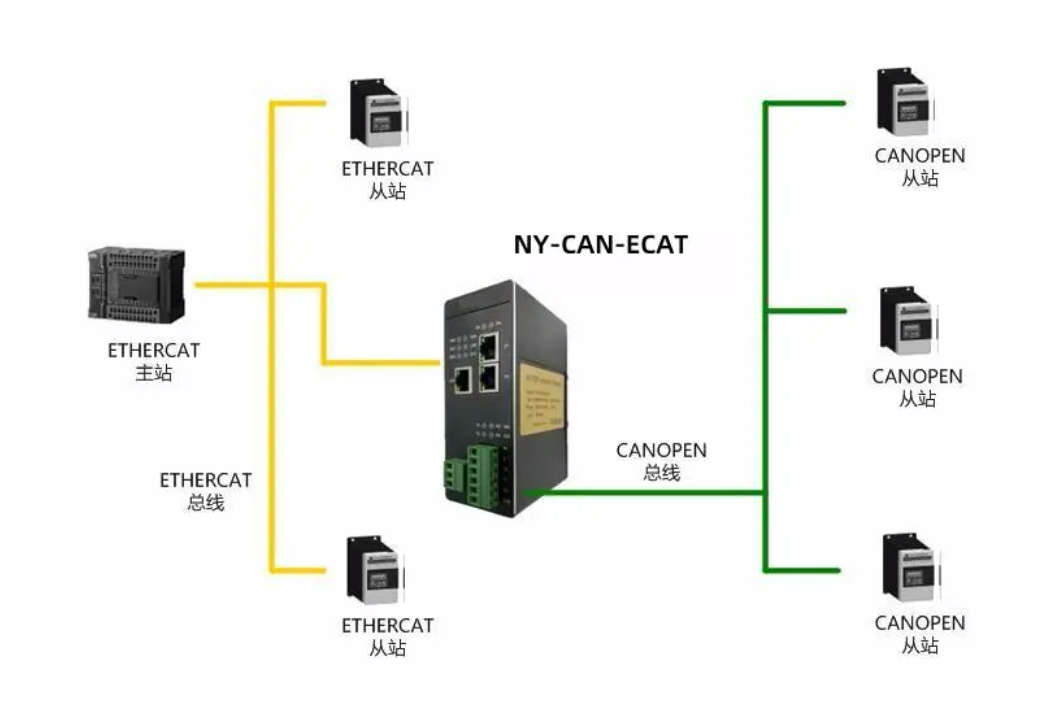
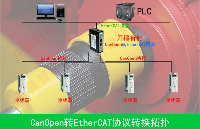
在工業自動化系統中,CANopen是一種基于串行總線的通信協議,廣泛應用于伺服驅動器等設備的控制中。它具有開放性、可擴展性和靈活性的特點,能夠滿足伺服系統對實時性和可靠性的要求。而EtherCAT作為一種基于以太網的高速通信協議,以其優異的性能和廣泛的應用前景受到越來越多企業的青睞。它不僅支持長距離通信,還能通過標準以太網接口與各種設備進行連接。為了解決CANopen設備與EtherCAT網絡的互操作性問題,市場上推出了CANopen轉EtherCAT協議轉換網關。這種網關能夠將CANopen接口設備連接到EtherCAT網絡系統中,作為EtherCAT網絡的一個從站,實現兩種不同協議設備之間的數據交換和控制信號傳遞。
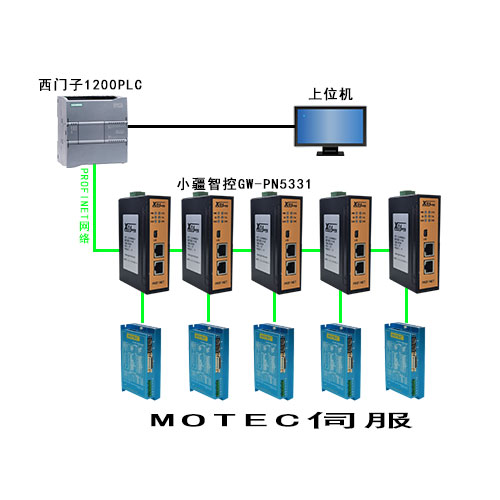
使用開疆智能CANopen轉EtherCAT網關的好處在于,它可以簡化系統集成的過程,使得原本不支持EtherCAT協議的設備也能夠輕松接入到EtherCAT網絡中。這不僅提高了系統的靈活性和兼容性,還能夠減少因更換設備而產生的額外成本,此外,網關的使用還可以提高數據傳輸的速度和穩定性,為工業生產提供更加可靠的保障。在實際應用中,例如在一個自動化生產線上,我們需要將多個伺服驅動器通過CANopen協議進行精確控制。這些伺服驅動器分別負責不同的工序,如物料搬運、加工定位等。為了將這些伺服驅動器集成到一個統一的EtherCAT網絡中,我們可以使用CANopen轉EtherCAT網關來實現這一目標。
我們需要根據項目需求選擇合適的硬件設備,包括伺服驅動器、網關、控制器等。在選擇過程中,我們需要注意設備的兼容性和性能指標,以確保系統的穩定運行。接著需要準備相應的接線圖和參數設置表,以便在安裝和調試過程中參考。這些資料通常由設備供應商提供,用戶可以根據實際需要進行調整。接下來,我們需要編寫PLC程序來控制伺服驅動器的運動。在這個過程中,我們可以利用工具來簡化編程工作。
我們需要對整個系統進行測試和優化。這包括檢查硬件連接是否正確、軟件配置是否合理、系統運行是否穩定等方面。只有當所有環節都經過嚴格測試并滿足設計要求時,才能確保系統的正常運行和生產效率的提升。開疆智能CANopen轉EtherCAT網關的應用為工業自動化領域提供了一種靈活的解決方案。它不僅簡化了系統集成的過程,還提高了系統的性能和可靠性。隨著工業自動化技術的不斷發展和完善,相信這類產品將會在未來發揮更加重要的作用。
-
CANopen
+關注
關注
8文章
263瀏覽量
43612 -
伺服驅動
+關注
關注
3文章
87瀏覽量
17720 -
ethercat
+關注
關注
18文章
705瀏覽量
38741
發布評論請先 登錄
相關推薦
通過Profinet轉CanOpen網關連接步科電機
應用案例丨伺服驅動器連接Ethercat轉profinet網關
Profinet轉Canopen網關連接MOTEC伺服
Profinet轉Canopen網關連接MOTEC伺服配置案例
Profinet轉Canopen網關連接SINEE變頻器案例
伺服驅動器連接Ethercat轉profinet網關應用案例
應用案例丨伺服驅動器連接Ethercat轉profinet網關
配置案例-CanOpen轉Profinet網關連接SD100伺服驅動器

CanOpen轉Profinet網關連接SD100伺服驅動器與PLC配置案例
伺服驅動器連接Ethercat轉profinet網關應用

耐用通信Ethercat轉canopen網關在鋼鐵行業的應用案例
3步輕松實現Canopen轉EtherCAT網關連接伺服驅動!
CANopen轉EtherCAT網關連接伺服驅動





 工商網監
工商網監
評論