") 紅外熱成像加速上車,輔助駕駛傳感器新選擇
紅外熱成像加速上車,輔助駕駛傳感器新選擇
電子發(fā)燒友網(wǎng)報道(文/梁浩斌)今年紅外熱成像技術(shù)開始越來越多地出現(xiàn)在新車上,仰望U8、昊鉑GT、東風(fēng)猛士917、翼真L380等車型都開始搭載紅外夜視系統(tǒng)。
紅外熱成像傳感器在汽車上的應(yīng)用其實(shí)已經(jīng)有一段時間,最早是在一些豪華汽車上作為夜視輔助的功能,將紅外熱成像畫面顯示在儀表盤上,為駕駛員提供大燈范圍以外的信息。以保時捷帕拉梅拉上選配的夜視輔助系統(tǒng)為例,這套系統(tǒng)除了在儀表盤上顯示熱成像畫面外,還會以不同顏色來突出顯示行人和大型野生動物,系統(tǒng)還會通過視覺和聲音等向駕駛員發(fā)出警告。
經(jīng)常夜間開車的人可能會遇到過一些場景:比如在鄉(xiāng)村小道上,盡管開著大燈,但從路邊草叢中突然跑出來的小動物總是讓人猝不及防,而熱成像就可以提前在黑暗中發(fā)現(xiàn)這些小動物,讓輔助駕駛系統(tǒng)或駕駛員提前發(fā)現(xiàn)及時作出預(yù)判。
以往紅外熱成像一般是作為單獨(dú)的駕駛輔助應(yīng)用,但如今融合感知算法越來越成熟,紅外熱成像在車載應(yīng)用上也能夠融入到智駕系統(tǒng)中。
紅外熱成像優(yōu)勢
與常見的CIS類似,紅外熱成像也是一種被動傳感器,不需要像激光雷達(dá)一樣增加激光發(fā)射模組,甚至不依賴可見光成像,成像不會受到光線強(qiáng)度影響。因?yàn)榧t外輻射是無處不在的,只要是高于絕對零度的物體,都會持續(xù)不斷向外輻射紅外線。
而紅外熱成像探測器就是通過感知波段為8-14微米的紅外光,不會受到空氣中雨、雪、霧霾、灰塵等顆粒影響。紅外熱成像探測器一般采用MEMS技術(shù)制造,通過吸收紅外輻射引起溫度變化,造成熱敏材料電阻產(chǎn)生改變,再通過ASIC進(jìn)行處理后轉(zhuǎn)換為視頻信號。
紅外熱成像探測器有幾個核心指標(biāo),包括分辨率,目前市場主流分辨率是384×288 、640×512等,更高的有1280×1024等;另外還有一個被稱為NETD(噪聲等效溫差)的重要參數(shù),它表示了當(dāng)目標(biāo)與背景之間的溫度差異等于系統(tǒng)本身的噪聲水平時的溫度差值,即探測器能夠探測到的最小溫度差異,比如NETD為50mK時,代表探測器可以在目標(biāo)和背景之間只有 0.05 攝氏度的溫差時仍然能夠清晰地區(qū)分它們。
算法迭代,實(shí)現(xiàn)真彩算法、可見光融合等效果
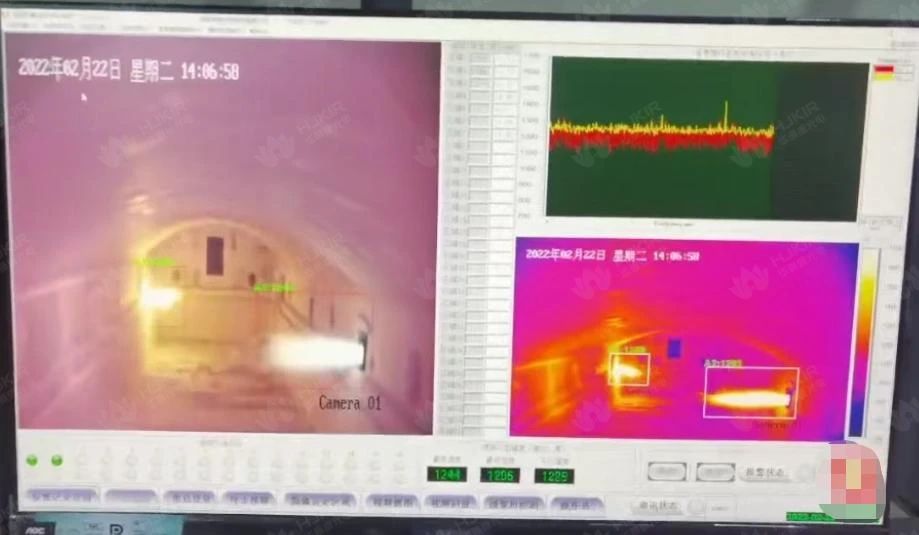
過去的熱成像畫面往往是呈現(xiàn)黑白灰的顏色,最近睿創(chuàng)微納就分享了幾種紅外熱成像畫面的進(jìn)階技術(shù)。包括Foresight采用紅外熱成像與可見光的CIS成像畫面融合,在傳統(tǒng)CIS的一些劣勢場景,比如暗光或者是進(jìn)出隧道的場景,結(jié)合紅外熱成像畫面來對畫面進(jìn)行補(bǔ)充。
除了融合的方案之外,目前睿創(chuàng)微納也推出了真彩轉(zhuǎn)換算法,將黑白灰的紅外熱成像畫面轉(zhuǎn)換成彩色畫面,更符合人眼直覺。據(jù)介紹,這種方案是通過深度學(xué)習(xí)算法,將畫面顏色補(bǔ)充上去。
利用紅外熱成像感知,還可以實(shí)現(xiàn)一些輔助駕駛安全的功能,比如識別各種類型的車和行人、動物等識別,除了識別物體之外,還可以提供紅外深度信息,結(jié)合輔助安全的算法來實(shí)現(xiàn)識別預(yù)警系統(tǒng)。
目前國內(nèi)兩大紅外熱成像芯片廠商高德紅外和睿創(chuàng)微納都推出了一些車載的產(chǎn)品,高德紅外旗下的軒轅智駕也針對車載應(yīng)用推出了基于紅外感知的智能駕駛系統(tǒng)解決方案,包括傳感器和算法平臺/硬件等。
小結(jié):
雖然紅外熱成像有諸多優(yōu)點(diǎn),但目前智駕領(lǐng)域普遍趨于低成本方向的發(fā)展路徑下,采用更少傳感器實(shí)現(xiàn)更好功能才是主流。而在更加高階或是高端車型上,包括激光雷達(dá)、紅外熱成像等技術(shù)作為系統(tǒng)安全的感知冗余,還將會有很大的發(fā)展空間。
-
傳感器
+關(guān)注
關(guān)注
2552文章
51217瀏覽量
754611
發(fā)布評論請先 登錄
相關(guān)推薦
紅外熱成像技術(shù)在玻璃行業(yè)的應(yīng)用
颯特紅外熱成像技術(shù)的創(chuàng)新應(yīng)用
熱釋電紅外傳感器的基本特性和應(yīng)用領(lǐng)域
紅外熱成像設(shè)備光學(xué)鏡頭詳解

PIR熱釋電紅外人體傳感器優(yōu)點(diǎn)主要有這些

一文讀懂車載紅外熱成像技術(shù)

紅外熱成像及時預(yù)警疾病信號




無人機(jī)+紅外熱成像技術(shù)優(yōu)勢

熱成像儀開發(fā)定制_紅外熱成像儀/紅外夜視儀主板方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論