") 定位 AGV搬運機器人是如何判斷貨物位置的?
定位 AGV搬運機器人是如何判斷貨物位置的?
談到智能工廠就不得不說智能物流,AGV小車作為智能物流的重要設(shè)備,是鏈接智能生產(chǎn)、智能工廠、智能物流的重要紐帶。隨著AGV技術(shù)的發(fā)展,無需任何輔助定位標志的無軌激光AGV移動機器人應(yīng)運而生,使AGV的靈活性和柔性發(fā)揮到最大。無軌激光AGV移動機器人定位是實現(xiàn)自主導(dǎo)航的關(guān)鍵,無軌激光AGV通過各種傳感器件感知周圍環(huán)境,獲取自身位置信息,從而自主進行規(guī)劃、調(diào)整運行路徑。
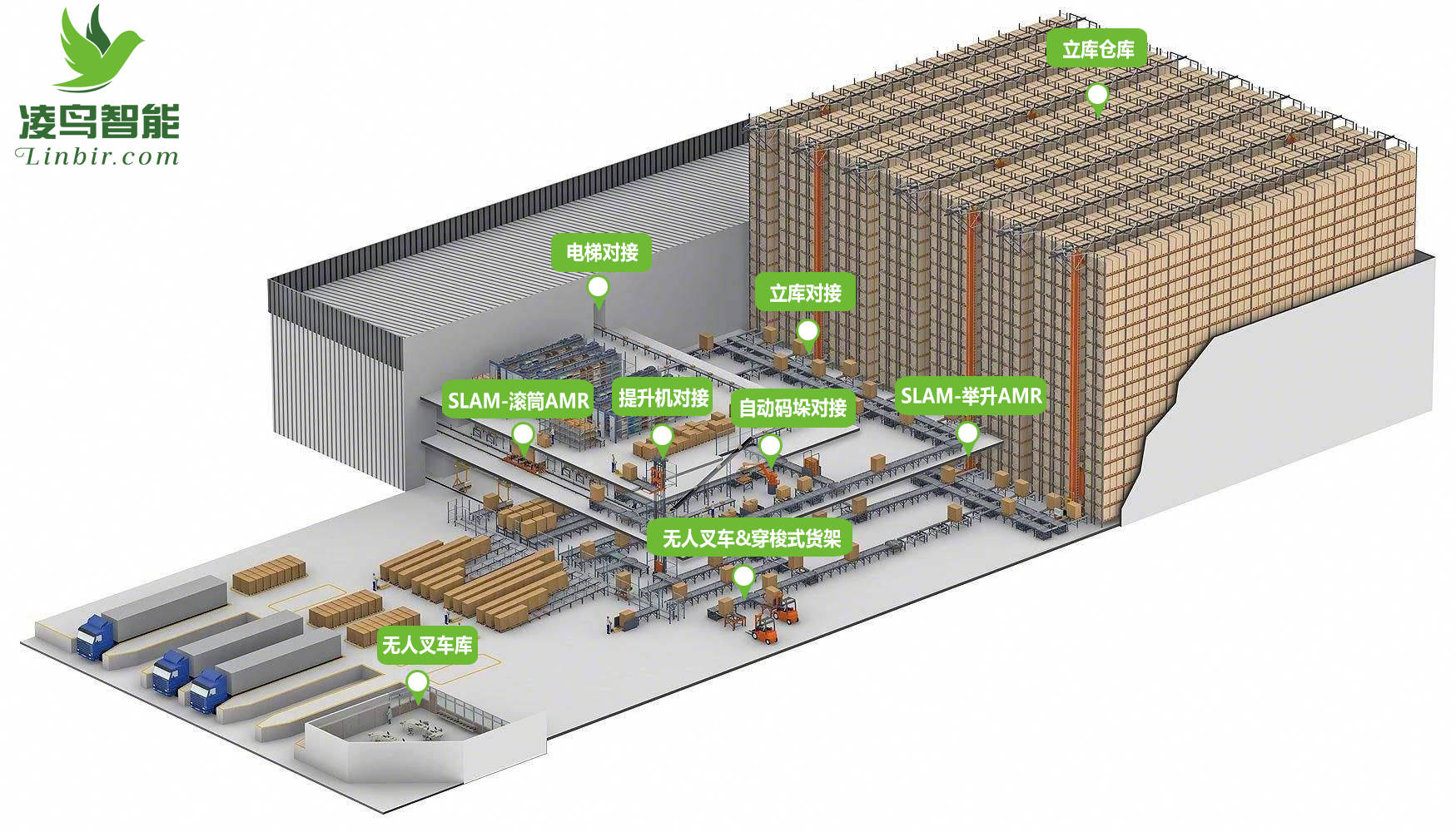
AGV倉儲物流
AGV(Automated Guided Vehicle)機器人判斷貨物位置的過程主要依賴于其集成的多種傳感器、導(dǎo)航技術(shù)以及先進的控制系統(tǒng)。以下是AGV機器人判斷貨物位置的主要方法:
激光導(dǎo)航
原理:激光雷達發(fā)射激光束并接收反射回來的信號,通過測量從發(fā)射到接收的時間差計算出物體的距離,激光雷達以高頻率旋轉(zhuǎn),獲取周圍環(huán)境的360度二維或三維點云數(shù)據(jù),形成環(huán)境的數(shù)字地圖。
作用:利用SLAM(同步定位與地圖構(gòu)建)技術(shù),AGV在初次運行時通過激光雷達掃描環(huán)境,創(chuàng)建環(huán)境的初始地圖,在運行過程中,激光雷達持續(xù)掃描環(huán)境,獲取實時點云數(shù)據(jù),控制系統(tǒng)將實時點云數(shù)據(jù)與預(yù)先構(gòu)建的地圖進行匹配,通過算法計算AGV的當前位置和姿態(tài),從而判斷貨物的位置。

激光AGV叉車
視覺導(dǎo)航
原理:利用相機或攝像頭捕捉周圍環(huán)境的圖像,通過圖像處理技術(shù)和深度學(xué)習(xí)算法識別物體、路標、貨物信息等。
作用:實現(xiàn)對周圍環(huán)境的精準感知,輔助AGV判斷貨物的位置。隨著深度學(xué)習(xí)技術(shù)的發(fā)展,視覺傳感器在AGV中的應(yīng)用越來越廣泛,為實現(xiàn)更高級別的智能化提供了可能。
其他導(dǎo)航技術(shù)
如電磁導(dǎo)航、慣性導(dǎo)航、GPS導(dǎo)航、二維碼導(dǎo)航等,這些技術(shù)也可以為AGV提供定位信息,但可能在精度、穩(wěn)定性或適用性方面有所不同。

不銹鋼AGV
距離傳感器
類型:如超聲波傳感器、紅外傳感器等。
作用:實時監(jiān)測AGV與貨物之間的距離,確保AGV以恰當?shù)乃俣群土Χ冉咏浳铩?/p>
光電傳感器
原理:由光電對管組成,當AGV到達目的地后,擋住紅外線,促使車輛發(fā)出控制信號。
作用:實現(xiàn)高精度的定位,幫助AGV準確地對準貨物位置。

AGV無人叉車
智能控制系統(tǒng)
接收來自傳感器和導(dǎo)航系統(tǒng)的信息,對AGV的動作進行精確調(diào)控。
通過復(fù)雜的算法和程序,根據(jù)實際情況快速做出決策,調(diào)整AGV的行駛速度、取放力度等參數(shù)。
路徑規(guī)劃與避障算法
接收來自傳感器和導(dǎo)航系統(tǒng)的信息,對AGV的動作進行精確調(diào)控。
實時檢測前方障礙物,并計算避障路徑,避免碰撞。
工作環(huán)境優(yōu)化
保持地面平整、減少雜物干擾等,以提高AGV判斷貨物位置的準確性。
貨物標識
在貨物上或周圍設(shè)置標識(如二維碼、條形碼等),以便AGV能夠快速識別并定位貨物。

AGV進電梯
然而,不管那種定位技術(shù)都沒有辦法解決所有問題,因此需要多種定位技術(shù)組合,來實現(xiàn)優(yōu)勢互補。激光AGV移動機器人定位采用先進的SLAM即時定位與地圖構(gòu)建技術(shù),AGV機器人從未知環(huán)境的未知地點出發(fā),在運動過程中通過重復(fù)觀測到的環(huán)境特征定位自身位置和姿態(tài),再根據(jù)自身位置構(gòu)建周圍環(huán)境的增量式地圖,從而達到同時定位和地圖構(gòu)建的目的。
審核編輯 黃宇
-
AGV
+關(guān)注
關(guān)注
27文章
1318瀏覽量
41151 -
搬運機器人
+關(guān)注
關(guān)注
0文章
60瀏覽量
8190
發(fā)布評論請先 登錄
相關(guān)推薦
無人AGV叉車是怎么判斷貨物位置的?建議收藏

agv搬運機器人是怎么實現(xiàn)無人搬運的?

AGV搬運機器人的“雙腿”——AGV系統(tǒng)
SLAM激光導(dǎo)航 地牛式AGV機器人,“7*24小時”玩著工作!

MT6501 磁編碼 IC 如何助力 AGV 定位采摘機器人精準作業(yè)
復(fù)合機器人倉庫搬運方案

M-G370/M-G365可應(yīng)用于AGV搬運機器人,AGV小車的慣性測量單元IMU

AGV搬運機器人:智能物流的得力助手
人工 VS AGV無人搬運機器人,AGV賦能中國智能制造


小身板 大能量,凌科電氣工業(yè)級連接器助力AGV搬運機器人顯身手!
YM20包膠款工業(yè)級連接器解決AGV搬運機器人電源連接需求






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論