 常見的表面測量方法簡介
常見的表面測量方法簡介
可實現更小晶體管的下一代技術是高數值孔徑EUV光刻。
眼睛是心靈的窗戶,人腦接收到的信息80%都是來自于眼睛,同時,大腦處理來自眼睛信息所消耗的能量占比也相當大。人眼只對波長大致在400nm-700nm的光起反應,在這個波段內的光我們稱之為可見光,可見光在自然界中只占一小部分,如圖:
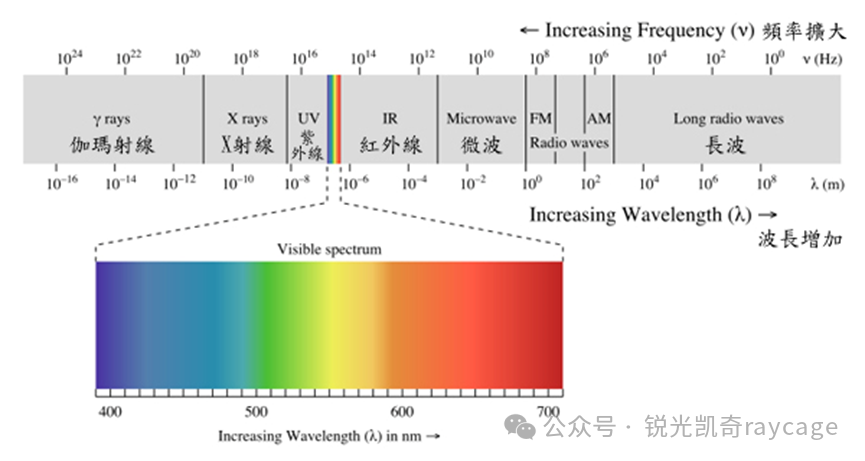
圖1 光譜圖
可見光中波長長的光線,人體肉眼感知為紅色,短的感知為紫色,所以在700nm以外的不可見光我們稱為長波紅外,在400nm以外的不可見光我們稱為短波紫外;紅外光分為近紅外(0.75-3um)、中紅外(3-6um)、遠紅外(6-15um)、極遠紅外(15-1000um);同樣的,紫外波段也分為真空紫外(10-100nm)、短波紫外(100nm-280nm)、中波紫外(280nm-320nm)、長波紫外(320nm-400nm)。光的波長不同,往往也有著不同的用途,其中紅外光可以用于促進植物生長,現在很多蔬菜大棚里面就會使用此類光線照射植物,促進生長,另外他也是熱量傳遞的主力軍,一般的寫字樓或者玻璃在做隔熱層的時候,一般也都是針對于紅外光做隔離。相比于紅外光紫外光就比較危險,他的波長短,能量較高,可以直接殺死一般的細菌或者病毒,平時在太陽下面曬被子,主要就是利用了太陽光中的紫外線;紫外線除了能夠消毒殺菌之外,也會對我們人體造成不可逆的損傷,長時間接觸紫外線可能會有致癌風險,同時我們的眼睛雖然看不見,但并不妨礙他損傷我們的眼睛,紫外線射入眼睛也可能會讓我們的眼睛失明,所以我們要慎重使用紫外線,以及一些帶紫外線的產品,比如我們常見的紫外殺菌燈,或者做美甲用的紫外燈等。
紫外線雖然對我們的影響十分的嚴重,但同時,他也推動著我們社會的進步,在光學加工領域,加工精度一般和光源波長成正相關,其中最頂尖的光刻機里面用到的極紫外光的波長只有十幾個納米,也正是因為有了它,才有我們現在的手機芯片、電腦芯片等;同時在光學加工中,加工精度的上限往往是你的檢測精度,只有在能檢測出需要的精度的情況下,才能加工出需要的精度,所以檢測手段往往也非常重要。
在高精度檢測領域,常用的手段有以下幾種:
1、機械探針:機械探針法是目前開發較早并且研究最為充分的一種表面形貌檢測方法,目前仍被廣泛應用于物體表面形貌的測量,是一種基本的表面輪廓測量方法。這是因為觸針式輪廓儀具有直觀、操作簡單等特點,能夠滿足絕大多數情況下的檢測需求。它利用機械探針和待測樣品表面接觸,當探針沿著待測樣品表面移動時,樣品表面微小的凹凸不平都會使得探針跟隨表面上下起伏,和探針組合在一起的位移傳感器能夠獲得探針的移動量,所測得的數據再經過計算機進行適當的運算處理就可以得到待測樣品表面的三維形貌信息。探針式輪廓儀的縱向測量精度可達0.1-0.2nm,縱向分辨率取決于配套的相移傳感器;橫向分辨率與探針針尖半徑和待測樣品表面形貌有關,一般可達0.05-0.25um。這種檢測方式具有測量范圍大測量精度高和結構簡單等優點,但是由于要和待測樣品表面進行直接接觸,所以極易損壞待測樣品的表面形貌,不適合測量銅、鋁等軟金屬表面或者表面涂有光刻膠的樣品。同時因為機械探針法是一種逐點掃描的測量方式,因此耗時長、檢測效率比較低綜上各種原因,機械探針法的適用范圍受到很大限制。
2、掃描電子顯微鏡(SEM):掃描電子顯微鏡的工作原理是利用一束極細的電子束掃描待測樣品表面,在待測樣品表面激發出次級電子,次級電子的多少與電子束的入射角有關,即與待測樣品的表面結構有關。次級電子由探測器接收并轉換為光信號,再經過光電倍增管和放大器轉變為電信號來控制熒光屏上的電子束強度,顯示與電子束同步的掃描圖像,此圖像是立體圖像,反映了待測樣品的表面結構。掃描電子顯微鏡具有較高的橫向分辨率和縱向分辨率,可以分別達到2nm和10nm的測量精度。但是這種方法需要在真空的環境下才能工作,且SEM樣品的制備過程非常復雜,同時要求待測樣品具備一定的導電性,操作復雜、費時且不能提供真實的三維數據,測量范圍也有很大的局限性并且價格非常昂貴,因此目前僅適用于微觀結構缺陷的掃描檢測。
3、掃描隧道顯微鏡(STM):掃描隧道顯微鏡的工作原理非常簡單,將電荷放在探針上,電流從探針流出通過整個待測樣品到達樣品的底層表面。每當探針通過單個原子,流出的電流就會發生變化,電流的變化被記錄下來就可以得到輪廓。掃描隧道顯微鏡有兩種工作模式,恒電流模式和恒高度模式。恒電流模式是利用一套反饋電路使得隧道電流保持不變,計算機控制針尖在待測樣品表面進行掃描。因為要保持電流不變,所以探針與待測樣品表面的相對高度也要保持不變,由此可以得到待測樣品表面的高度信息即可得到待測樣品的三維形貌圖。恒高度模式是保持探針針尖的絕對高度不變,這樣探針針尖與待測樣品表面的高度差會發生變化,隧道電流的大小會隨著高度差的變化而變化,通過計算機記錄下隧道電流的變化并且轉換成圖像信號顯示出來就可以得到三維形貌圖像。這種檢測方式具有原子級別的高分辨率,縱向分辨率可以達到0.001nm,橫向分辨率可以達到1nm,也可以實時獲取待測樣品表面的三維形貌信息,可以適應不同的工作環境,但是和掃描電子顯微鏡一樣,它也需要待測樣品具有一定的導電性,同時掃描隧道顯微鏡的測量范圍非常小,橫向測量長度一般在幾微米到幾十微米量級,因而它只適用于超小超光滑表面形貌的測量。除此之外,掃描隧道顯微鏡的結構復雜、制造技術難度大等問題也限制其使用范圍。
4、原子力顯微鏡(AFM):原子力顯微鏡工作時,把一個對微弱力極其敏感的微懸臂的一端固定住,在另一端固定一個微小的針尖,使得針尖和待測樣品的表面輕微接觸。因為針尖尖端的原子與待測樣品表面的原子之間存在排斥力的作用,在整個掃描過程中控制這種力的大小保持恒定,讓針尖在垂直于待測樣品表面的方向上做起伏運動。通過計算機后期處理原子力大小與高度信息的關系,從而獲得待測樣品表面三維形貌的重建。原子力顯微鏡的縱向分辨率可以達到0.01nm。這種方法不需要對待測樣品進行處理因此減少了對樣品的損害,但它的檢測速度慢、檢測范圍比較小(橫向測量長度只能達到10mm量級)并且受探頭影響較大,因而適用范圍受到限制,常用來測量線條寬度而很少用于測量表面形貌。二十世紀五十年代,光學技術被引入進行表面形貌測量,從而實現非接觸式測量。其中就包括了白光干涉顯微術。
5、白光干涉顯微術:白光干涉顯微術的工作原理如圖所示。采用低相干光源,一般為白光LED、鹵素燈等;從待測樣品表面返回的測試光束與參考鏡返回的參考光束相互干涉產生干涉條紋,在兩者的零光程差位置處,出現干涉極值,此時條紋的對比度最好。和單色光干涉情況不同,白光干涉信號是由多種不同的單色光干涉信號組合而成,可以看成是由多個不同周期的余弦函數疊加而成的,因此在不同掃描位置處,兩束光的干涉強度不同。當測試光與參考光的光程差為零時,干涉信號最強,因此可以通過在光強極值處尋找對應的縱向高度信息。和單色光干涉檢測法相比,白光干涉利用了白光寬光譜的低相干性,避免了相位模糊的問題,實現了對微納元器件表面三維形貌的高精度檢測。由于白光干涉顯微術具有非接觸檢測、大測量范圍、高分辨率等特點,使得它被認為是最有應用前景的微納結構測量技術,因而受到廣泛關注。
目前成熟的商業化白光檢測儀器,也叫白光干涉儀,它的檢測縱向分辨率能夠達到0.1nm,常用的白光干涉儀可以大致分為下面三種:Michelson、Mirau、Linnik。
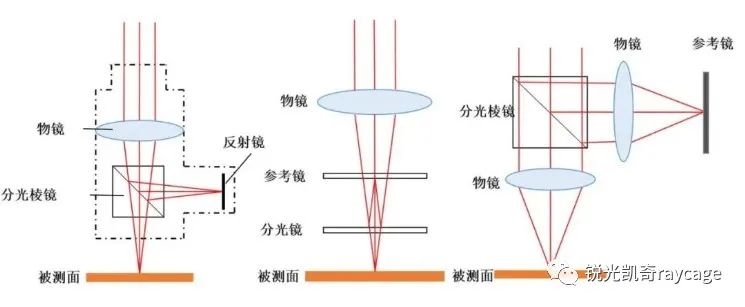
圖2 三種常見的白光干涉結構
上圖為三種常見的白光干涉結構,從左到右依次為:Michelson、Mirau:此類結構的白光干涉儀與傳統顯微鏡結構一致,在傳統反射式照明顯微鏡的基礎上將物鏡改為干涉物鏡即可,干涉物鏡相對于傳統物鏡來說,需要在物鏡最前方放置分光棱鏡,并在側邊放置參考反射鏡(Michelson),或者放置分光片和正上方放置小尺寸反射鏡(Mirau);兩種結構都需要占用物鏡前方空間,從而在物鏡設計以及長工作距離應用場景下,不能得到很好的利用;同時,Michelson的物鏡體積比較大,且穩定性欠佳;Mirau結構的物鏡由于是同光路設計,所以抗干擾能力會比較強,但同時光路中心有小尺寸反射鏡會擋住一部分光線。
Linnik:此結構利用分光棱鏡和兩個一樣的物鏡同時對兩個樣本成像,一個是反射鏡(我們稱為參考臂),一個則是我們的樣品。這種結構相對于前兩種來說,使用兩只普通物鏡,不需要在物鏡前方放置分光裝置,在物鏡的設計和成本上都有著非比尋常的優勢,同時物鏡的選擇不受限,市面上的物鏡都可以使用,無論是長工作距離,還是浸油的高NA物鏡,都能使用
-
測量
+關注
關注
10文章
4899瀏覽量
111510 -
STM
+關注
關注
1文章
556瀏覽量
42524 -
AFM
+關注
關注
0文章
59瀏覽量
20187
原文標題:常見的表面測量方法簡介
文章出處:【微信號:bdtdsj,微信公眾號:中科院半導體所】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
常見的三維測量方法和工具
硅拋光片的主要技術指標、測試標準及硅片加工參數的測量方法
國內常見的石油管道外徑測量方法?

壓敏電阻好壞測量方法有哪些
數字示波器的測量方法有哪三種
pcb熱阻的測量方法有哪些
噪聲的測量方法

噪聲的測量方法
變頻磁控管的測量方法有哪些
LDO的PSRR的各種測量方法





 工商網監
工商網監
評論