 從小米HAD看端到端大模型技術的可行性與未來發展
從小米HAD看端到端大模型技術的可行性與未來發展
近日,第二十二屆廣州國際車展上,小米正式發布了其全場景智能駕駛方案——Xiaomi HAD。這一方案的核心是基于端到端大模型技術,旨在實現從車位到車位的高階智能駕駛場景,其技術亮點包括高精度動態駕駛能力、窄路和復雜場景適應能力,以及自動泊車與自主路徑規劃功能。小米的這次發布不僅是其進軍智能駕駛領域的重要標志,更為行業展示了端到端大模型技術的廣闊前景。
小米HAD方案中的核心技術亮點
1. 端到端大模型的引入
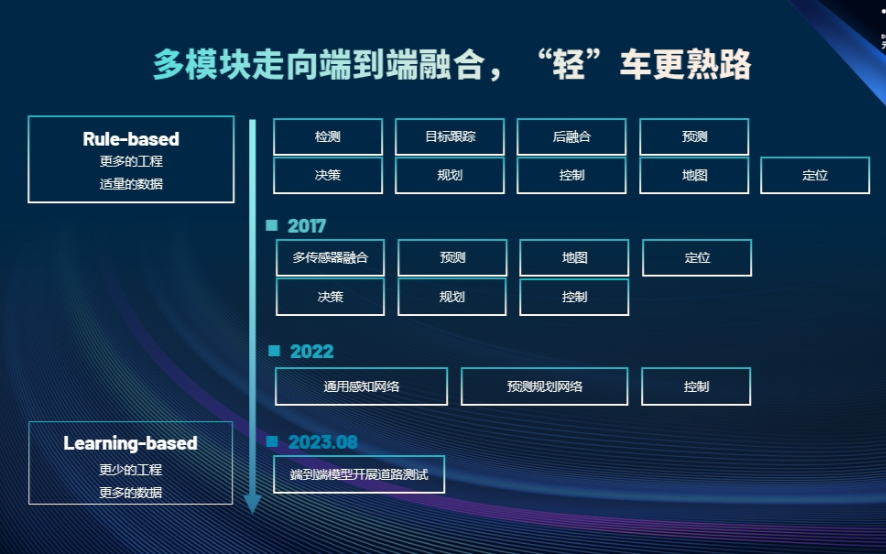
Xiaomi HAD采用小米自主研發的端到端大模型,這一技術通過整合感知、決策、規劃和控制的多環節任務,實現了高效的智能駕駛方案。與傳統模塊化方案不同,端到端模型將駕駛過程簡化為一個統一的訓練和推理任務,大幅減少了冗余計算和數據傳遞延遲。例如,小米HAD展示的“車位到車位”全場景駕駛能力,正是基于大模型在動態感知和路徑優化上的強大計算能力。
2. 復雜場景處理能力
發布會上,小米展示了在ETC、窄路通行、限寬柱通過等復雜場景下的自動駕駛功能。端到端模型能夠通過多模態數據融合(激光雷達、攝像頭、毫米波雷達等),實時捕捉環境信息,并生成符合場景特征的精準駕駛策略。這種能力尤其適合解決傳統模塊化系統在高階駕駛場景中的應對不足問題。
3. 自動泊車與場景切換能力
小米HAD支持停車場環境的自主泊車功能。借助高精度地圖與環境感知技術,系統能夠識別停車場的實際布局,規劃最佳泊車路徑。這種智能化操作為用戶帶來了極大的便捷,也顯示出端到端大模型在高復雜度場景中的應用潛力。
端到端大模型在智能駕駛中的關鍵應用
1. 高精定位與路徑規劃
端到端技術的應用離不開高精度定位系統與動態路徑規劃算法的支持。通過結合實時動態差分定位(RTK)和高精地圖,系統能夠在厘米級誤差范圍內確定車輛位置。同時,端到端模型將實時感知環境中的動態信息,如其他車輛、障礙物與道路標識,直接生成最優行駛路徑。這種路徑規劃的高度集成性大幅提升了系統的實時性與可靠性。
2. 復雜場景的多模態感知
智能駕駛必須面對各類復雜場景,如窄路駕駛、限寬柱通行或復雜停車場環境。端到端模型能夠通過融合多模態感知數據(激光雷達、毫米波雷達、攝像頭等),識別場景特征并生成相應駕駛決策。例如,車輛在狹窄道路上通行時,模型根據視覺數據實時調整方向和速度,確保通過空間的最優利用。
3. 動態行為預測與決策
動態行為預測是端到端大模型的重要組成部分。通過感知周圍車輛、行人及其他動態物體,系統能夠預測其未來行為并進行前瞻性決策。例如,在限寬通行場景中,模型需結合環境預測,確保車輛安全通過的同時保持駕駛體驗的一致性。這一過程需要強大的實時計算能力與場景理解能力。
端到端技術的可行性分析
1. 數據驅動的技術可靠性
端到端模型的性能高度依賴于訓練數據的質量與數量。目前,智能駕駛行業已經積累了海量的道路場景數據,并建立了覆蓋全球多種場景的高精地圖庫。這些數據的支持使得端到端模型在復雜駕駛場景中的可靠性顯著增強。然而,數據分布的不均衡仍然可能在一些特殊場景中導致模型表現下降,例如極端天氣或突發交通事故。
2. 硬件發展與計算資源支持
端到端大模型需要強大的計算平臺支持。近年來,高性能車載計算平臺(如域控制器)的出現,使得在車輛端部署大規模神經網絡成為可能。同時,基于芯片架構優化的加速器(如GPU、TPU)能夠提供更高的實時計算能力,為端到端系統的運行提供保障。隨著硬件成本的下降和性能的提升,技術的量產化可行性逐漸提高。
3. 冗余設計與安全性保障
盡管端到端模型能夠實現全流程自動化,其安全性仍需要通過冗余設計來進一步保障。現代智能駕駛系統通常引入基于規則的冗余控制模塊,以在模型失效或決策不當時提供安全兜底方案。此外,實時車輛監控與智能切換功能能夠在異常情況下切換到手動駕駛或更保守的自動駕駛模式。這些冗余機制顯著提升了技術的可靠性和可用性。
端到端模型面臨的挑戰
1. 泛化能力的瓶頸
雖然端到端模型能夠通過大數據訓練提高場景適應性,但對于未曾見過的特殊場景,其泛化能力仍存在局限性。例如,狹窄山區道路或復雜的鄉村環境可能會導致模型表現不佳。這需要行業進一步優化數據覆蓋范圍和模型設計。
2. 法律法規與社會接受度
端到端模型的部署需要在技術與法律之間尋求平衡。當前許多國家尚未完全建立智能駕駛技術的監管框架,公眾對自動駕駛的安全性也存在顧慮。這些問題將直接影響端到端技術的推廣與商業化。
3. 成本與商業化障礙
端到端大模型的研發和部署需要投入大量資源,包括數據采集、模型訓練與硬件成本。如何在商業化過程中降低技術門檻并提升用戶體驗,是未來技術發展必須解決的關鍵問題。
未來趨勢與技術發展方向
隨著智能駕駛技術的不斷演進,端到端大模型將進一步推動自動駕駛從“輔助”向“全面接管”轉變。未來的發展趨勢可能包括:1. 場景化技術優化:針對具體場景(如高速公路駕駛、城區擁堵通行)進行技術優化,提升系統的實用性。2. 軟硬件協同進化:通過芯片架構的優化與傳感器技術的升級,實現端到端模型更高效地運行。3. 標準化與法規完善:推動行業制定統一標準,促進法律框架完善,解決技術推廣的政策瓶頸。
結語
端到端大模型的興起標志著智能駕駛技術的一次重大飛躍。其高度集成性與場景適應性為實現真正的全自動駕駛提供了可能。然而,技術可行性仍受到數據質量、硬件支持與法律環境的制約。隨著技術的不斷成熟和市場需求的提升,端到端大模型有望在未來幾年成為自動駕駛領域的核心技術,并推動行業邁向更高層次的智能化階段。
-
智能駕駛
+關注
關注
3文章
2534瀏覽量
48799 -
自動駕駛
+關注
關注
784文章
13844瀏覽量
166573
發布評論請先 登錄
相關推薦
端到端自動駕駛技術研究與分析
黑芝麻智能端到端算法參考模型公布

小米超級智能駕駛技術HAD正式發布
連接視覺語言大模型與端到端自動駕駛

智己汽車“端到端”智駕方案推出,老司機真的會被取代嗎?

端到端InfiniBand網絡解決LLM訓練瓶頸

端到端測試用例怎么寫
實現自動駕駛,唯有端到端?

人臉識別技術的可行性在于矛盾具有什么性
小鵬汽車發布端到端大模型

牽手NVIDIA 元戎啟行端到端模型將搭載 DRIVE Thor芯片
端到端模型卷入智駕圈 周光:今年上車!






 工商網監
工商網監
評論