 特斯拉FSD,從全棧自研到智能駕駛的未來
特斯拉FSD,從全棧自研到智能駕駛的未來
編者語:「智駕最前沿」微信公眾號后臺回復:C-0573,獲取本文參考報告:《特斯拉 FSD:智駕全棧自研 開啟宏圖新篇》pdf下載方式
隨著全球汽車工業朝著電動化、智能化、網聯化方向發展,智能駕駛技術已然成為各車企研發的主要方向之一。在眾多自動駕駛技術的探索者中,特斯拉(Tesla)憑借FSD(Full Self-Driving)系統,占據了行業的領先地位。FSD系統自發布以來,經歷了從外部合作到全棧自研的轉型,并在感知、決策、執行等方面實現了全鏈路閉環。特斯拉通過其研發的硬件、軟件和計算架構,展現了從基礎芯片設計到全局數據閉環的超強技術集成能力。FSD系統不僅僅是一個自動駕駛系統,它更代表了特斯拉在人工智能、芯片設計、大數據處理等多個領域的技術實力。
特斯拉FSD的軟硬件閉環架構
1.1技術全棧自研的發展歷程
早在2013年,特斯拉開始探索自動駕駛技術,并在2014年10月與Mobileye合作,發布了第一代自動駕駛硬件HW1.0,并率先搭載在Model S。Mobileye為特斯拉提供了基于視覺識別的智能駕駛芯片EyeQ3,支持基本的駕駛輔助功能。然而,隨著自動駕駛技術需求的增長,Mobileye的技術無法滿足特斯拉的長遠規劃,于是在2016年特斯拉轉向與英偉達合作,推出了HW2.0系統,搭載了英偉達Drive PX2平臺。這一平臺采用了更為先進的計算能力和感知技術,使得特斯拉的自動駕駛能力得到了進一步提升。盡管與外部合作伙伴的合作幫助特斯拉迅速切入了自動駕駛領域,但硬件的迭代速度和集成性依舊受到限制。因此,特斯拉在2019年發布了HW3.0系統,正式轉向硬件自研。這一自研平臺標志著特斯拉從芯片、算法到算力的全面自主掌控。特斯拉在此基礎上,推出了首款完全自研的FSD芯片,并不斷通過OTA(Over-the-Air)升級來優化自動駕駛的功能。2023年,特斯拉發布了FSD V12,成為全球首個端到端自動駕駛系統,實現了從感知到決策的閉環架構。

特斯拉自動駕駛系統發展歷程
1.2軟硬件架構的高度集成
特斯拉FSD系統的核心優勢之一在于其軟硬件架構的高度集成。FSD系統集成了從感知到執行的完整鏈條,覆蓋了自動駕駛的各個層面。其系統架構主要包括感知層、規控層、執行層三大模塊,每一模塊都通過自研算法、芯片和數據平臺進行了深度優化。感知層:特斯拉采用了BEV(Bird Eye's View,鳥瞰圖)+ Transformer架構來提升車輛對周圍環境的感知能力。通過對多攝像頭數據進行融合,FSD系統能夠將2D的圖像信息轉化為對3D環境的精確感知。同時,Occupancy Network(占用網絡)進一步增強了對復雜場景下物體運動狀態的識別能力,特別是在遮擋物體和動態場景中表現尤為突出。規控層:特斯拉在規控層引入了基于神經網絡的規劃算法和蒙特卡洛樹搜索(Monte Carlo Tree Search),以確保決策的高效性和安全性。該系統不僅能夠快速評估所有可能的駕駛軌跡,還能根據實時的道路環境進行動態調整。執行層:FSD系統通過高度優化的硬件平臺,實現了決策與執行的快速響應。特斯拉自研的FSD芯片具備卓越的計算能力,能夠在極短時間內執行從感知到控制的全過程。這種軟硬件的高度集成確保了特斯拉自動駕駛系統的高效、精準與穩定。
特斯拉FSD技術端的核心創新
2.1感知算法的優化與創新
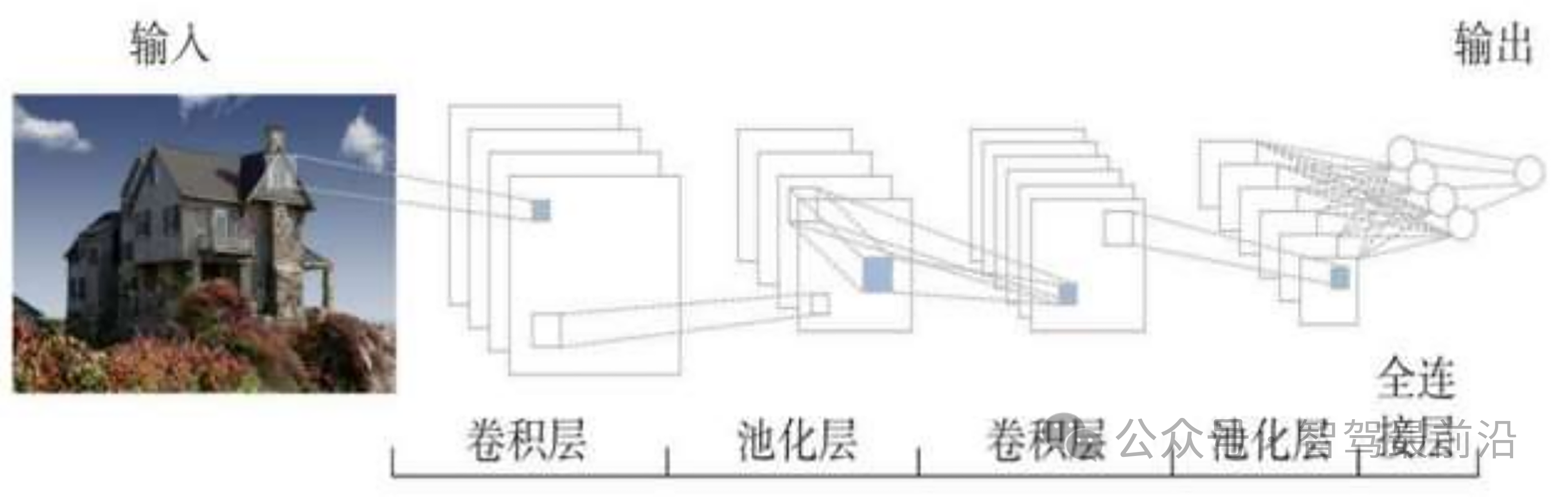
感知作為自動駕駛系統的核心之一,直接影響車輛對外界環境的理解和反應速度。特斯拉FSD系統中的感知模塊采用了HydraNets架構,該架構能夠將多個視覺任務整合到同一個網絡中,從而實現了多任務并行處理。這種多任務處理能力顯著提升了系統的感知效率,使得特斯拉能夠以相對較低的硬件成本實現高精度感知。
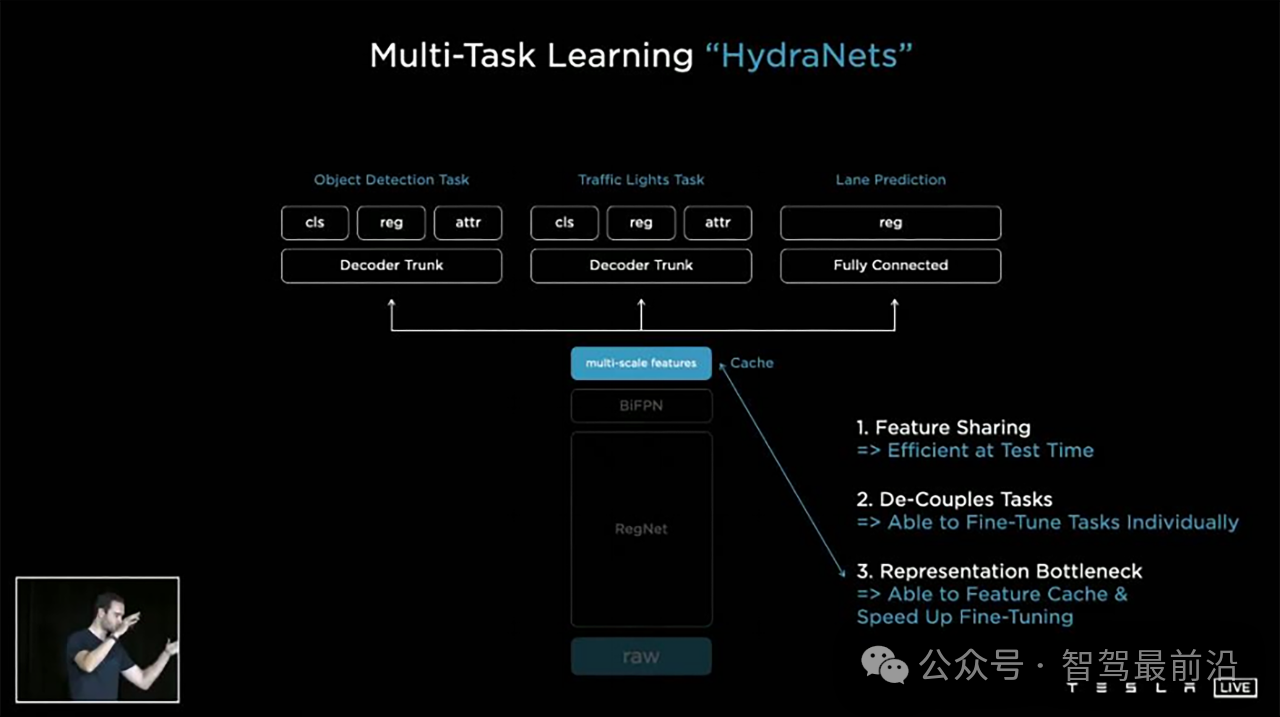
特斯拉視覺感知系統算法采用HydraNets架構
此外,特斯拉還引入了Occupancy Network,這是HydraNets的升級版。Occupancy Network通過將車輛攝像頭的2D圖像數據轉化為3D空間占用信息,極大地提高了對長尾障礙物(如掛車、石塊等)的識別能力。Occupancy Network不僅能夠對靜態物體進行精確感知,還能夠捕捉物體的運動狀態差異,尤其是在識別復雜地形和動態物體時,表現出色。
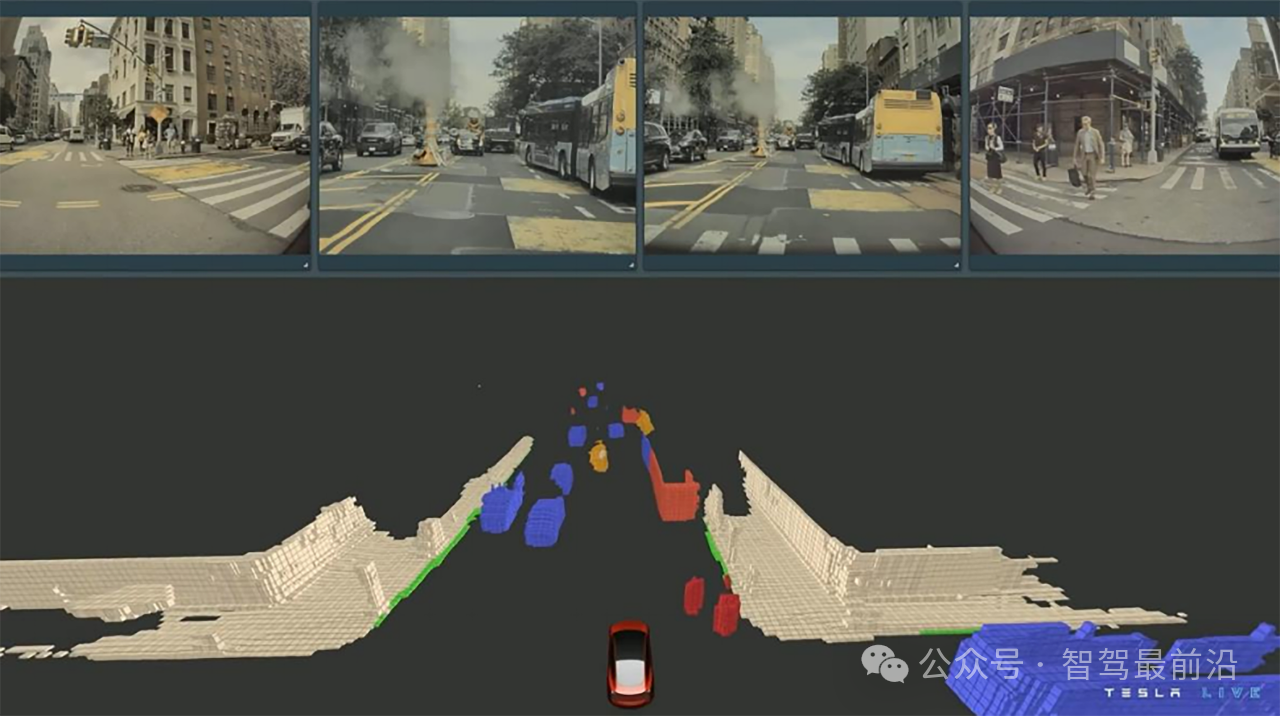
Occupancy Network對正在啟動的兩節公交車運動狀態進行精準捕捉
2.2算法層的規劃與決策增強
自動駕駛系統不僅需要精確的感知能力,還需要在復雜的交通環境中快速做出決策。特斯拉FSD系統在決策層引入了交互搜索框架(Interactive Search Framework),該框架通過分層任務分解和蒙特卡洛樹搜索,能夠在極短時間內評估所有可能的駕駛軌跡,并選出最優的駕駛方案。特斯拉采用的遞增式規劃算法在評估每個軌跡時,逐步增加約束條件,從而在保證系統安全的前提下,優化路徑選擇。特別是在復雜的城市交通環境中,FSD系統能夠應對多車道切換、行人避讓、道路施工等多種復雜場景。這得益于特斯拉對算法的持續優化,使得FSD系統不僅具備在高速公路上的出色表現,還能夠在城市街道上實現高效、安全的自動駕駛。
2.3自研芯片的算力與數據引擎
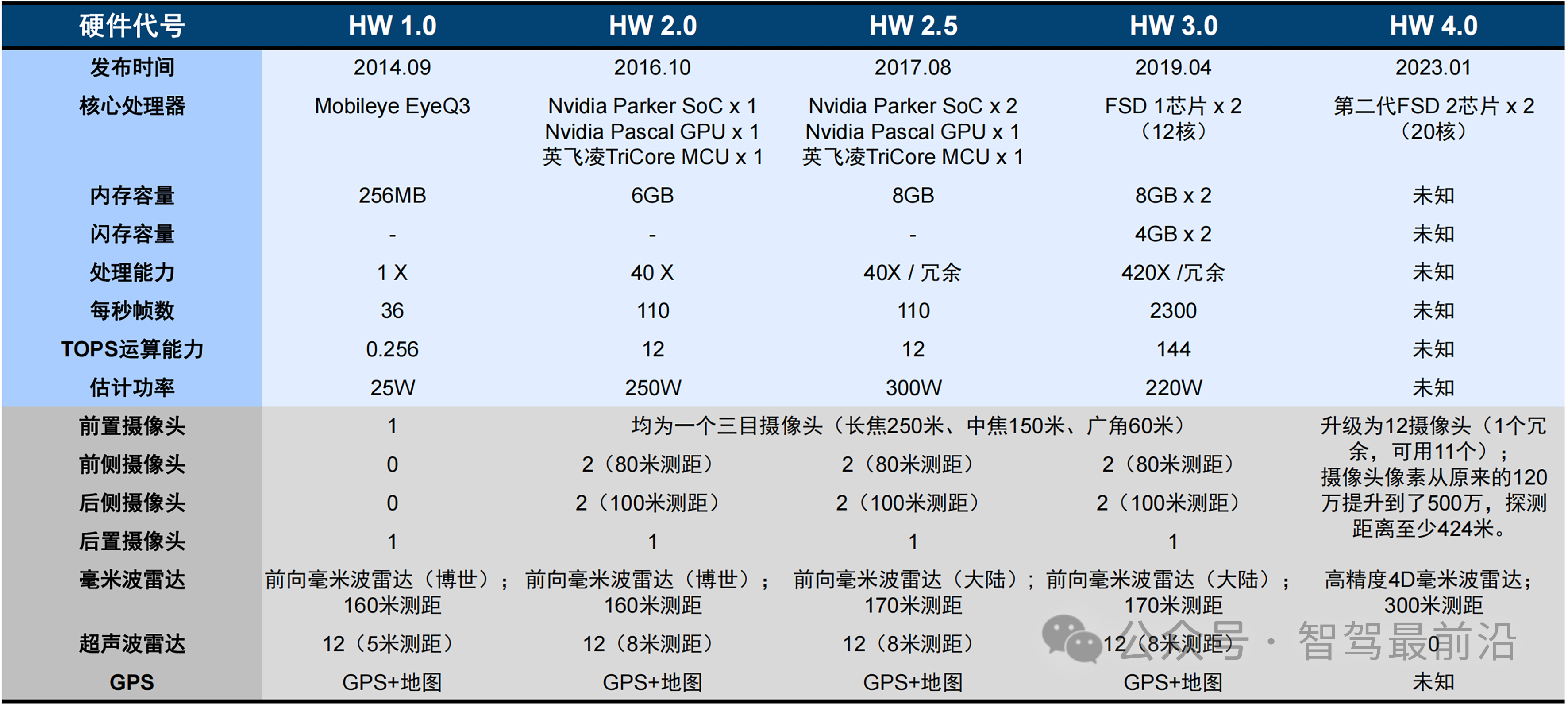
特斯拉FSD的另一項核心創新來自其自研的FSD芯片。特斯拉在HW3.0系統中首次引入了自研芯片,具備144 TOPS(Tera Operations Per Second)的強大算力。而隨著FSD系統的不斷進化,特斯拉的硬件平臺也得到了顯著提升,HW4.0系統中的FSD 2.0芯片實現了720 TOPS的算力提升。
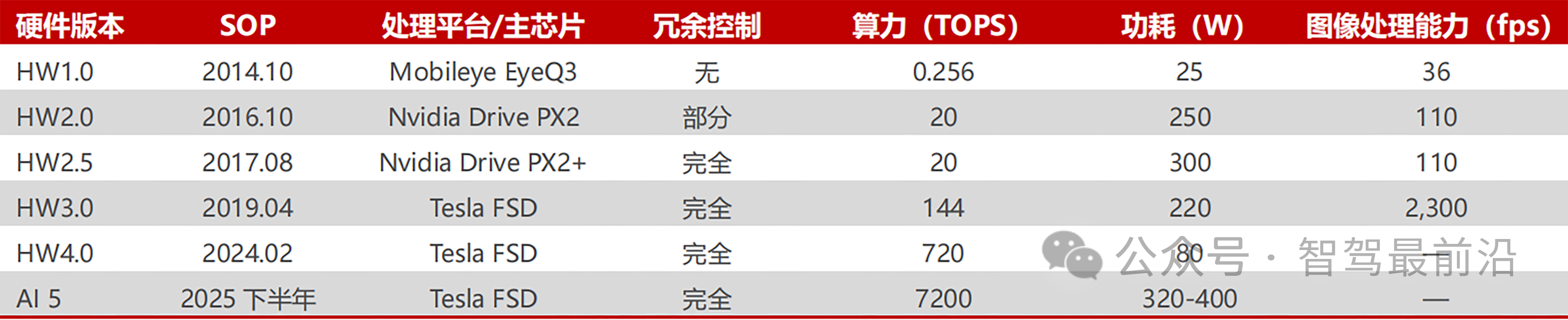
特斯拉自動駕駛硬件平臺不同版本對比
FSD芯片采用異構設計,集成了CPU、GPU、神經網絡加速器(NNA)等多個核心處理單元。該設計不僅提高了芯片的計算性能,還通過雙冗余系統增強了安全性。當主系統發生故障時,備用系統能夠立即接管,確保自動駕駛功能的安全冗余。通過這種軟硬件的深度結合,特斯拉FSD實現了快速計算和精準控制的雙重優化。
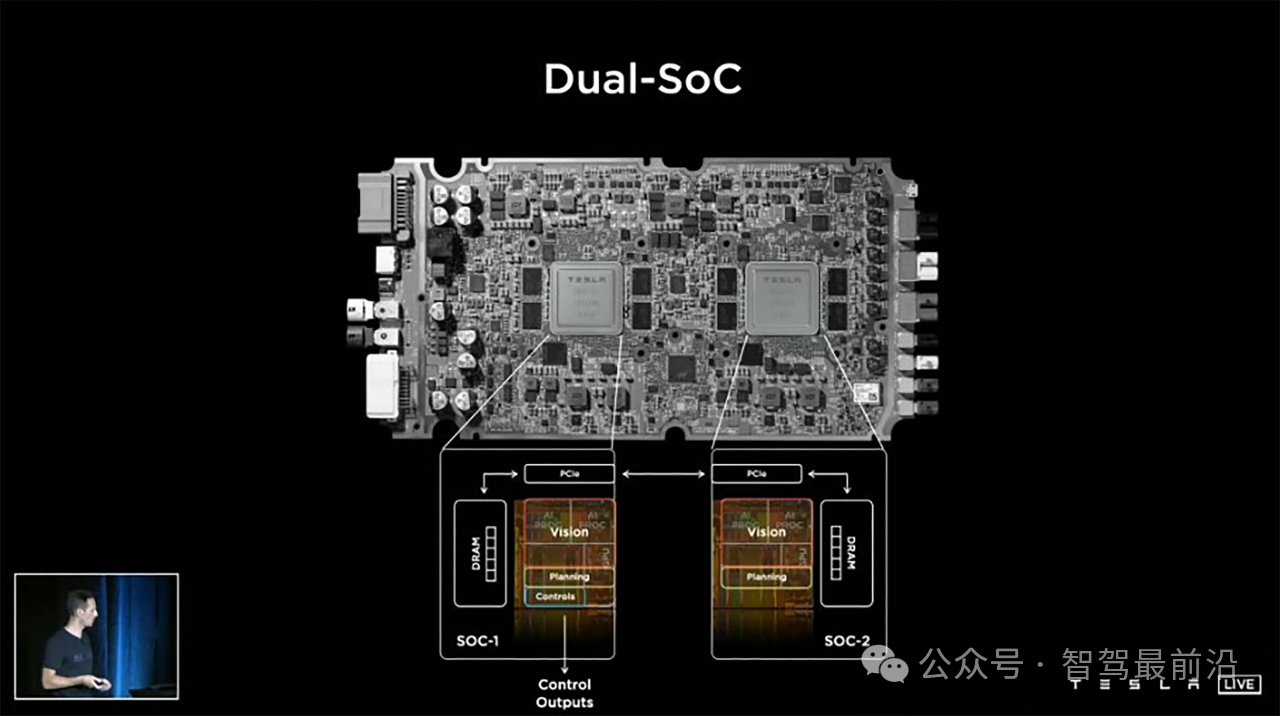
特斯拉FSD雙芯片系統設計
在算力平臺方面,特斯拉還自研了Dojo超級計算機系統,以應對FSD系統海量數據處理的需求。Dojo系統通過高效的分布式計算架構,能夠在短時間內處理大規模神經網絡的訓練任務,為FSD系統的算法迭代提供了強大的算力支持。
FSD的數據閉環與智能化迭代
3.1自動化數據標注與仿真訓練
特斯拉FSD系統的另一大技術亮點是其高效的數據閉環體系。自動駕駛系統的性能很大程度上依賴于海量的訓練數據,而如何高效獲取、標注、處理這些數據是自動駕駛企業面臨的一大挑戰。特斯拉通過自動標注系統和仿真訓練,成功實現了數據閉環優化。自動標注系統能夠在短短12小時內標注超過1萬個駕駛旅程,這一效率相當于500萬個小時的人工標注工作量。特斯拉的自動標注系統結合了4D標簽生成和仿真模擬技術,不僅提高了標注效率,還能夠在虛擬環境中對極端場景進行訓練。這種數據閉環體系確保了FSD系統的持續優化與迭代。
3.2 數據驅動的模型訓練與優化
特斯拉通過自動化數據閉閉環體系來不斷優化FSD系統的性能。這一體系包括了海量的真實道路數據和虛擬仿真數據的收集、處理、標注和訓練,使得特斯拉FSD能夠快速適應各種復雜駕駛環境,提升自動駕駛的魯棒性和安全性。仿真訓練在特斯拉的FSD系統中發揮了至關重要的作用。自動駕駛系統需要應對大量復雜且極端的駕駛場景,而在現實世界中,這類場景出現的頻率極低。因此,特斯拉通過構建虛擬仿真空間,在模擬環境下重現極端或復雜的駕駛場景,以提高算法的訓練效率和泛化能力。通過仿真訓練,FSD系統能夠在安全的環境中快速迭代算法,有效減少真實場景下的數據采集成本,并大幅提高系統應對復雜環境的能力。
3.3 數據引擎的構建與閉環優化
特斯拉的FSD系統不僅依賴于大規模數據的收集,還通過數據引擎實現了數據的自動化篩選與優化。數據引擎能夠通過影子模式從車輛中收集到海量的駕駛數據,并自動篩選出具有高價值的語義數據,這些數據被回傳至云端,用于進一步的模型訓練與優化。通過這種方式,特斯拉形成了閉環的數據流,確保FSD系統能夠根據最新的數據持續進行優化。
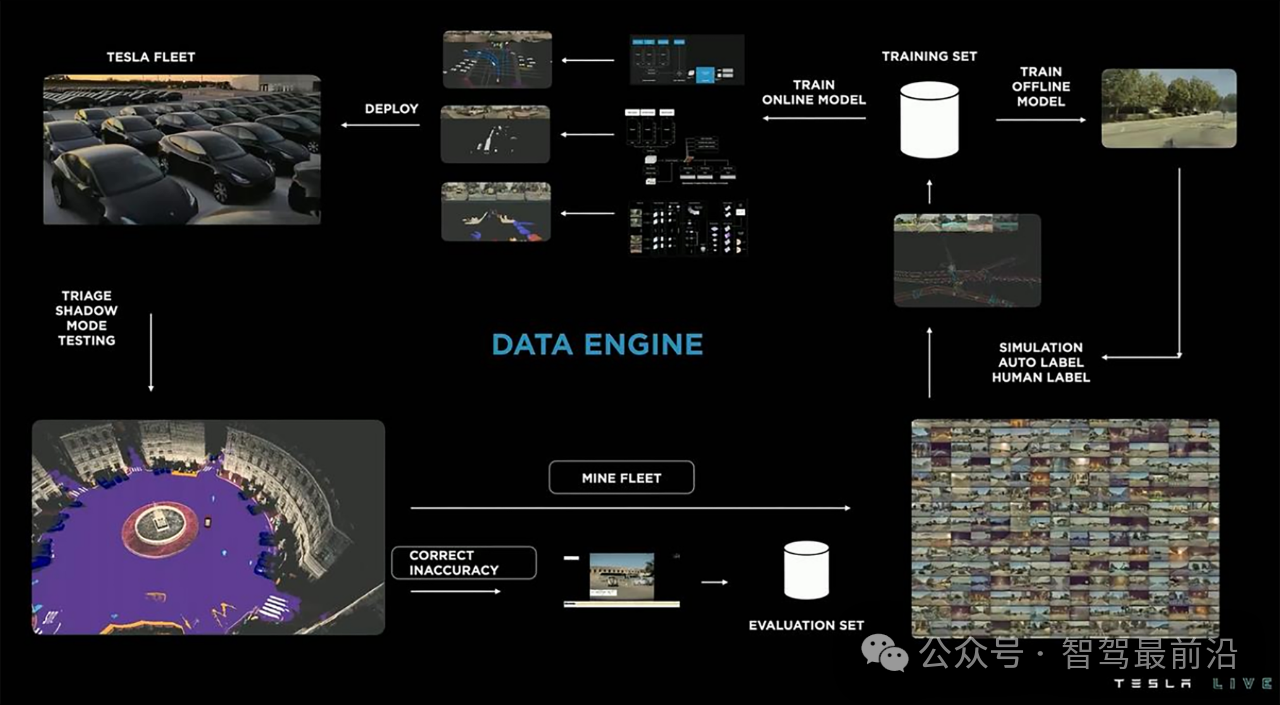
特斯拉數據引擎示意圖
數據引擎的核心作用在于從海量數據中找到最具價值的部分,特別是那些包含了復雜場景或異常情況的數據。這些數據經過篩選、標注和處理后,被用于對FSD模型進行進一步的訓練和優化。通過這種自動化的數據閉環,特斯拉能夠不斷提升FSD系統的可靠性和安全性,實現真正意義上的自我進化。
特斯拉FSD的商業化應用與未來展望
4.1Robotaxi的推出與商業化進程
隨著特斯拉FSD技術的不斷成熟,Robotaxi(自動駕駛出租車)成為了特斯拉未來商業化的一個重要里程碑。Robotaxi的推出將標志著特斯拉FSD系統從技術研發走向大規模應用,同時也意味著特斯拉自動駕駛商業模式的正式落地。特斯拉計劃于2025年正式推出Robotaxi服務,并在全球范圍內推廣這一創新的出行方式。在剛結束的“We, Robot”發布會上,特斯拉推出的無人駕駛出租車Cybercab,就讓我們看到了特斯拉在自動駕駛出租車領域的涉足。
Robotaxi的核心優勢在于通過FSD技術實現完全自動駕駛,無需人為干預,這不僅可以顯著降低運營成本,還能夠為用戶提供更加安全、便捷的出行體驗。隨著FSD V12和V13版本的發布,特斯拉Robotaxi的技術已經具備了大規模應用的條件。在未來幾年內,特斯拉將通過Robotaxi服務改變全球的出行方式,為公司帶來巨大的商業收益。
4.2市場前景與智能駕駛的拐點
特斯拉FSD的商業化應用標志著智能駕駛技術發展的一個重要拐點。隨著技術的快速迭代,特斯拉在全球市場中的競爭優勢將逐步顯現。目前,全球汽車市場正處于從傳統駕駛向智能駕駛過渡的關鍵時期,消費者對自動駕駛的接受度逐漸提高,政策法規也在逐步放寬。這些因素為特斯拉FSD的商業化推廣提供了有利條件。根據市場預測,全球自動駕駛市場將在未來十年內達到數千億美元的規模。特斯拉憑借其領先的技術優勢,有望成為這一市場中的主要推動力量。尤其是隨著Robotaxi和FSD的進一步推廣,特斯拉將從一家電動汽車制造商轉型為智能出行服務提供商,開拓出新的商業模式和增長機會。
4.3自動駕駛與政策法規的互動
盡管特斯拉在技術上已經走在了前列,但自動駕駛的商業化進程仍受到政策法規的限制。各國政府對自動駕駛技術的監管政策尚處于不斷完善的階段,尤其是在涉及安全性、責任劃分和數據隱私等問題時,政策的不確定性可能會影響FSD的落地和推廣。特斯拉需要與各國政府和監管機構密切合作,確保其FSD系統符合當地的法律法規。同時,特斯拉還需要解決與自動駕駛相關的責任問題,特別是在發生交通事故時,如何界定駕駛系統的責任將成為政策制定中的關鍵點。因此,FSD的商業化不僅需要技術的支持,還需要政策法規的完善與配合。
特斯拉FSD技術面臨的挑戰與風險
5.1技術層面的挑戰
雖然特斯拉FSD在技術上取得了顯著突破,但其仍面臨一些挑戰和局限。現階段,完全自動駕駛系統在復雜的城市環境中,仍然面臨著感知和決策上的難題。如在多變的天氣條件下,如何確保視覺感知的準確性就是一個需要解決的問題。此外,自動駕駛系統在處理極端交通狀況(如擁堵、意外事故等)時的反應速度和決策質量,也直接影響著系統的可靠性和安全性。FSD系統的算法迭代依賴于海量的訓練數據,而收集這些數據需要大量的資源投入。同時,特斯拉雖然依靠其自動標注系統和仿真訓練降低了部分成本,但面對全球不同駕駛環境和交通規則的多樣性,FSD系統在全球推廣時仍需要進一步優化和適應。
5.2 數據安全與隱私問題
自動駕駛技術的推廣也伴隨著大量數據的采集與處理,如何保證用戶數據的安全和隱私是特斯拉FSD面臨的另一個挑戰。特斯拉FSD系統通過影子模式收集用戶的駕駛數據,并將這些數據上傳至云端進行模型訓練。雖然這種數據驅動的優化模式大大提升了系統的性能,但也引發了對數據安全的擔憂。特斯拉需要采取更加嚴格的措施來保護用戶數據的隱私,并遵守各國的數據隱私法律。例如,歐盟的《通用數據保護條例》(GDPR)對數據的采集、存儲和使用提出了嚴格的要求,特斯拉需要確保其FSD系統符合這些規定。此外,數據泄露的風險也需要得到充分重視,一旦發生大規模的數據泄露事件,可能會對公司聲譽和用戶信任度造成重大影響。
5.3市場競爭與技術迭代風險
隨著越來越多的科技公司和汽車制造商加入自動駕駛領域,市場競爭日益激烈。特斯拉雖然在技術上處于領先地位,但并不是唯一一家進行全棧自研的公司。Waymo、Cruise、百度Apollo等公司都在積極推進自動駕駛技術的研發,并在部分領域具備競爭優勢。特斯拉需要保持快速的技術迭代速度,確保其FSD系統在市場中保持領先地位。同時,公司還需要在自動駕駛的商業模式上進行更多創新,以應對來自其他企業的競爭壓力。尤其是在自動駕駛專利和技術標準的爭奪上,特斯拉需要鞏固其市場主導地位,防止被競爭對手趕超。
總結
特斯拉FSD系統的全棧自研策略為其在全球自動駕駛市場中奠定了強大的技術基礎。通過在算法、芯片、算力和數據等多個層面的創新,特斯拉成功打造了一套完整的自動駕駛系統,具備出色的感知、決策與執行能力。隨著FSD技術的不斷進化,特斯拉不僅推動了自動駕駛技術的發展,還為未來的智能出行模式提供了新的可能性。然而,FSD的未來發展仍面臨著技術挑戰、政策法規的不確定性以及市場競爭的壓力。特斯拉需要繼續加大研發投入,確保技術的持續迭代,同時積極與各國政府合作,推動自動駕駛法規的完善。在商業化方面,Robotaxi的推出將成為特斯拉的一個重要里程碑,為公司開辟新的商業機會。
審核編輯 黃宇
-
特斯拉
+關注
關注
66文章
6317瀏覽量
126625 -
智能駕駛
+關注
關注
3文章
2534瀏覽量
48799 -
自動駕駛
+關注
關注
784文章
13844瀏覽量
166573 -
FSD
+關注
關注
0文章
95瀏覽量
6133
發布評論請先 登錄
相關推薦
特斯拉帶火“端到端”智駕,國內車企加速上車

特斯拉正在為FSD套件研發新的停車功能
深度解析研華全棧式AI產品布局
特斯拉FSD V13.2版本正式發布
從特斯拉看智能駕駛未來發展
比亞迪最快于11月實現自研算法量產,推進智駕芯片自研進程
特斯拉智能駕駛|從視覺優先的技術路徑到未來的挑戰?
特斯拉正與車企洽談FSD系統授權事宜
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
特斯拉FSD(完全自動駕駛)或將在未來兩周內進入中國市場?
特斯拉FSD進入中國?假消息!






 工商網監
工商網監
評論