 EtherCAT運動控制器配套用手持示教器快速入門
EtherCAT運動控制器配套用手持示教器快速入門
前言
手持示教器是一種便攜式操作裝置,通常由外殼、內部電路板、控制面板(如按鈕、旋鈕、顯示屏等)以及連接線等組成,用于實現特定的控制或操作功能。在機械設備中,手持示教器常用于遠程控制和操作,提高工作效率和安全性。在工業自動化控制系統中,作為人機交互界面,實現復雜控制指令的輸入和反饋。
正運動自主研發產品手持示教器ZHD400X和ZHD500XB,為了方便用戶了解該產品,本文主要給大家介紹一下ZHD400X和ZHD500XB的硬件接口與使用。

產品簡介
ZHD400X和ZHD500XB都是一款網絡顯示的觸摸屏示教盒,示教盒必須和支持ZHMI功能的控制器配合使用。
ZHD400X手持示教盒帶有24V電源,帶有800*480分辨率的真彩顯示屏,18個按鍵,配急停開關。
ZHD500XB手持示教盒帶有直流24V電源,帶有1024*600分辨率的真彩顯示屏,16個按鍵,配急停開關,鑰匙選擇開關,外加一個可以按的手輪。
ZHD400X示教盒特性
(1)可編程示教盒,可以通過腳本程序來實現各種顯示界面。
(2)繪圖功能:中英文字符,直線,圓弧,圖片。
(3)帶急停按鈕。
(4)帶18個按鍵,按鍵功能可定制。
(6)支持HMI組態協議。
(7)適用于各種機械或機械手控制。
(8)支持觸摸屏,可以按鍵和觸摸配合使用。
(9)800*480分辨率觸摸屏。

ZHD400X示教盒
ZHD500XB示教盒特性
(1)可編程示教盒,可以通過腳本程序來實現各種顯示界面。
(2)繪圖功能:中英文字符,直線,圓弧,圖片。
(3)帶急停按鈕、鑰匙選擇開關、手輪。
(4)帶16個按鍵,按鍵功能可定制。
(5)RJ45水晶頭,U盤接口。
(6)支持HMI組態協議。
(7)適用于各種機械或機械手控制。
(8)支持觸摸屏,可以按鍵和觸摸配合使用,可使用觸控筆,便于一些場景下更方便的操作。
(9)1024*600分辨率觸摸屏。
(10)優美的外觀+符合人體工程學的外形設計,有效提升操作員的舒適感。

ZHD500XB示教盒
ZHD400X和ZHD500XB是開放式的帶觸摸屏的可編程示教盒,通過RTSys軟件和RTBasic和RTHmi語法來開發界面程序,具有友好的用戶界面,支持圖形化顯示和直觀的操作方式。操作人員可以通過示教盒的顯示屏查看機器人的運行狀態、報錯信息等,并通過按鍵或觸摸屏等方式與機器人進行交互,可以在線跟蹤調試,簡單易用。
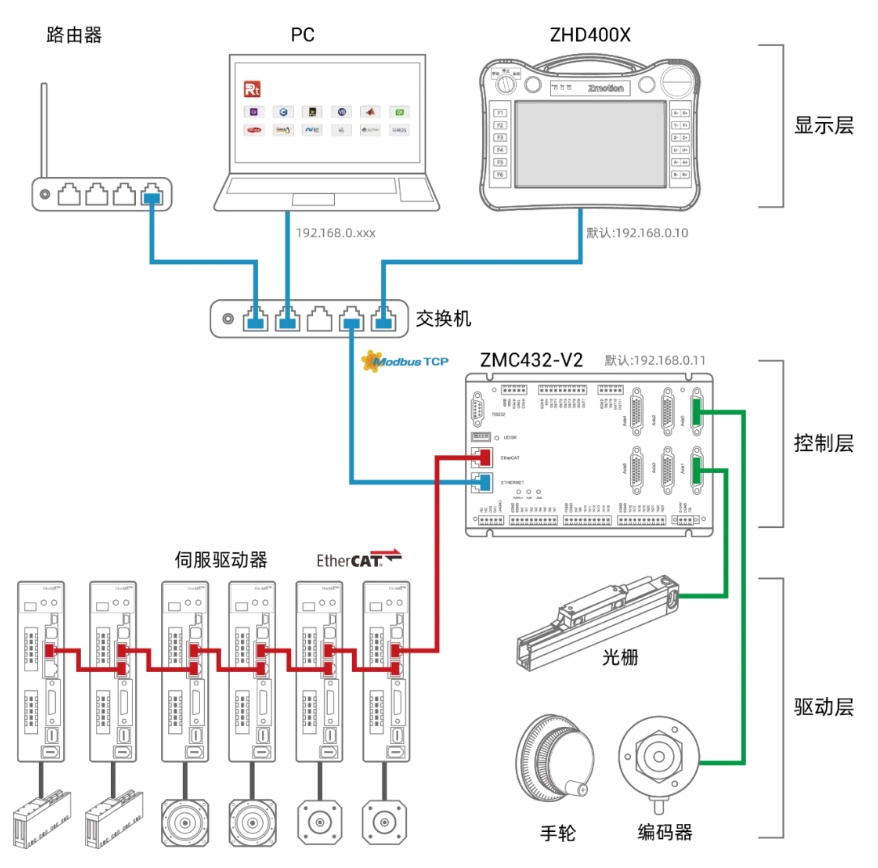
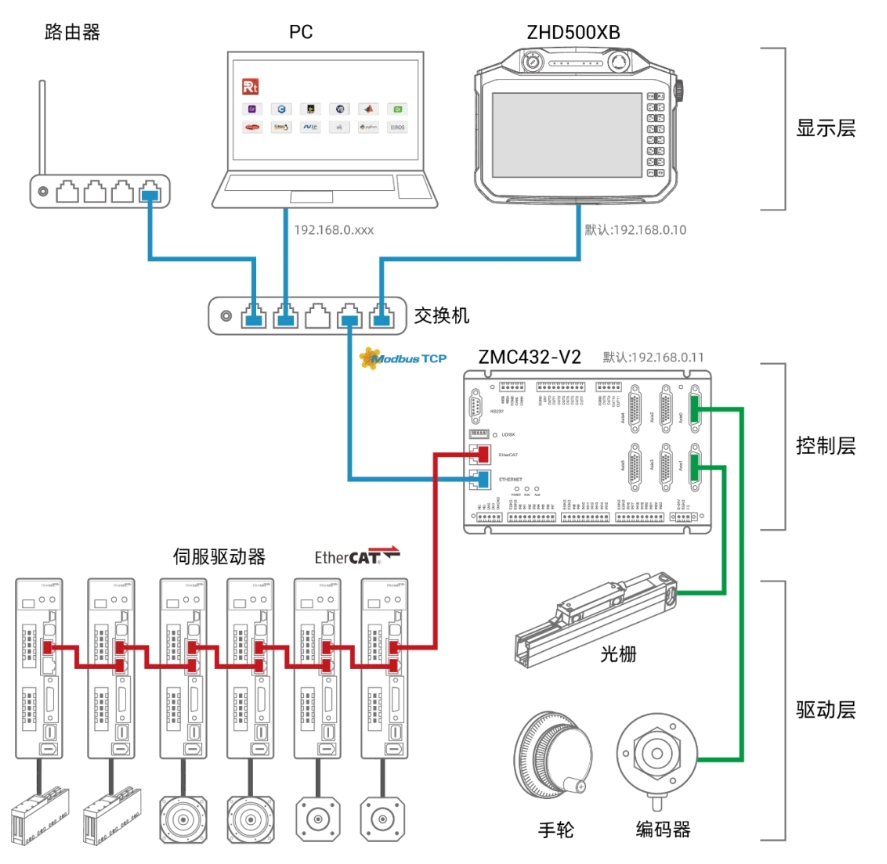
ZHD400X系統配置
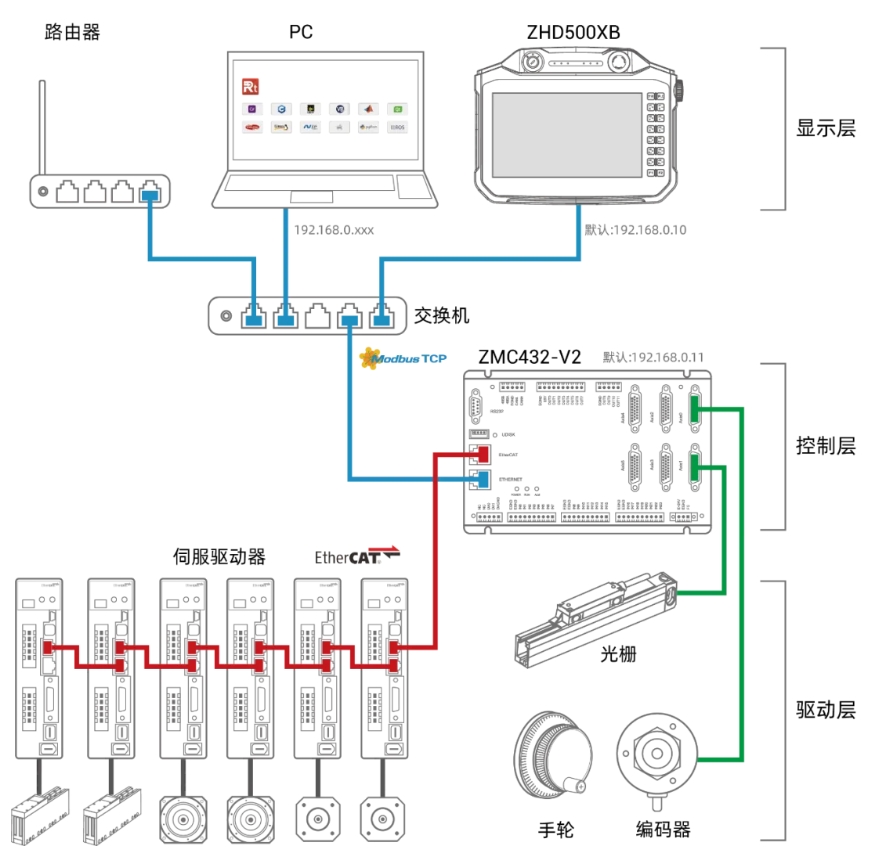
ZHD500XB系統配置
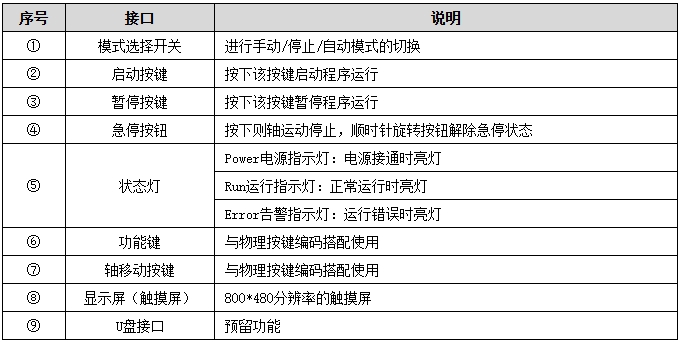
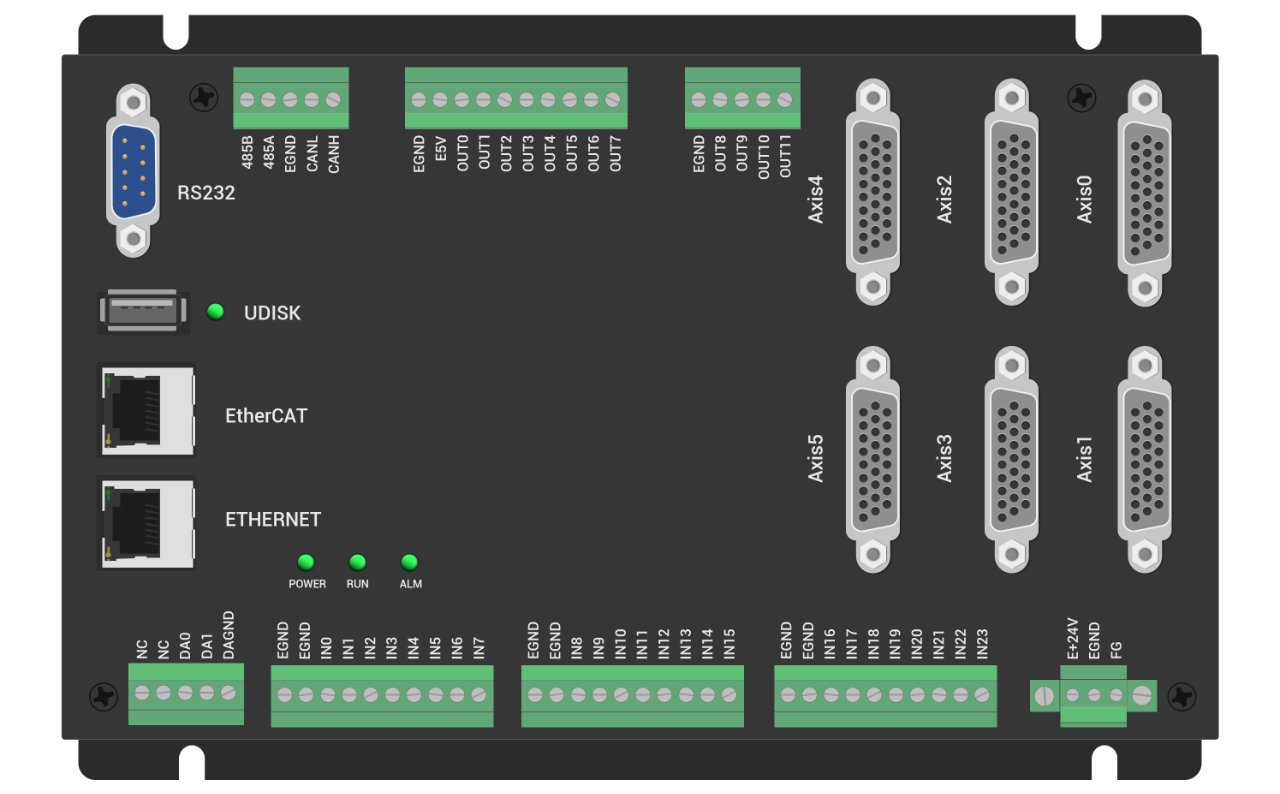
ZHD400X接口定義
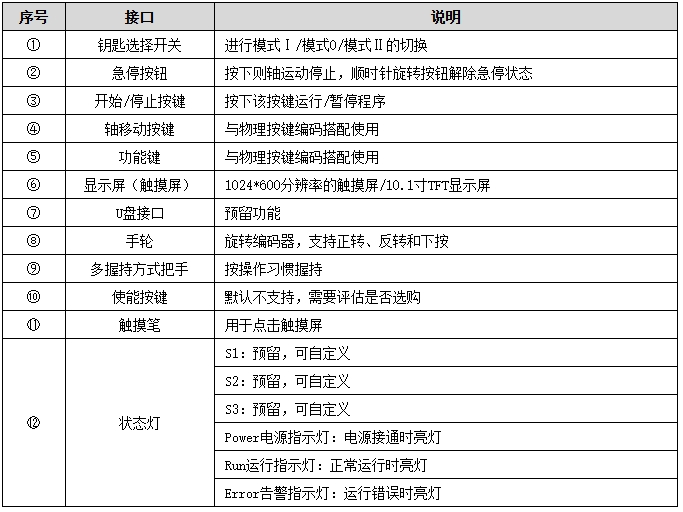
ZHD500XB接口定義
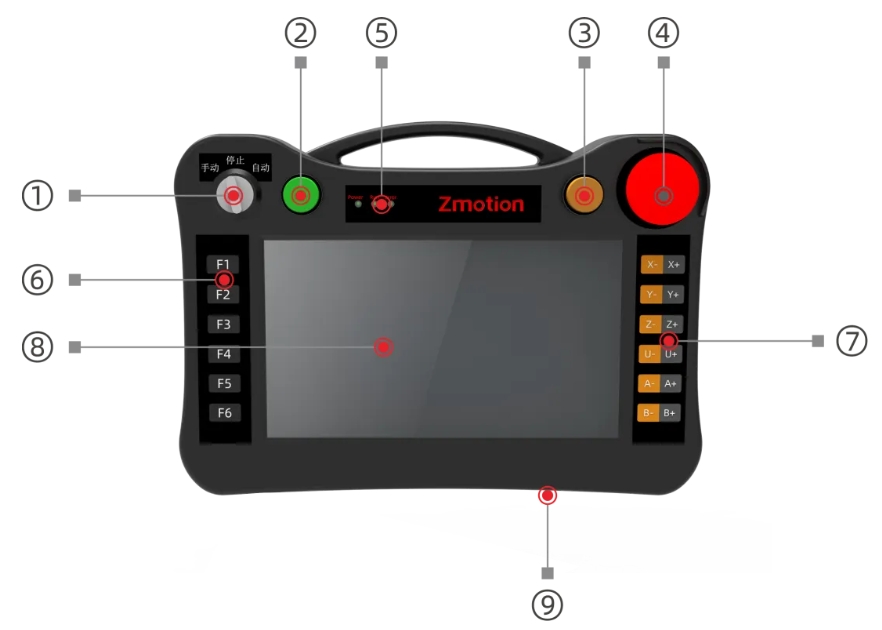
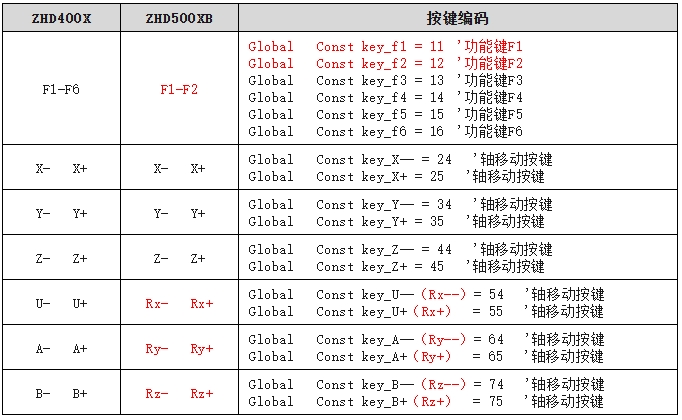
物理按鍵
ZHD400X帶18個按鍵,ZHD500XB帶16個按鍵,需要配合物理按鍵編碼使用,按鍵功能可定制。按鍵的編碼按行列組合而成。
按鍵按下時,示教盒自動向控制器發送物理按鍵,控制器程序可以檢測到物理按鍵,如果需要使用虛擬按鍵,需要在組態里面使用按鍵轉換表。具體使用可參考《RTHmi編程手冊》。
1.模式選擇開關

2.啟動(開始)/暫停(停止)/急停按鍵

3.手輪ZHD500XB支持手輪,使用手輪時,Atype設置為24(遠程編碼器軸類型)。需要控制器5系列20180404以上固件版本支持。

4.使能按鍵(ZHD500XB選購)

5.面板按鍵
使用操作
1.接通電源
ZHD400X/ZHD500XB連接線網線一端的水晶頭邊上引出紅色線接DC24V正極,黑色線接DC24V負極即可。

2.觸摸校正
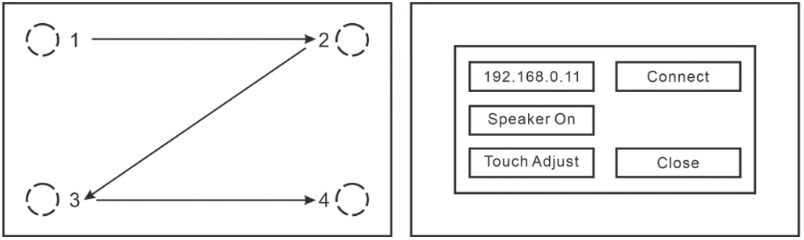
(1)方式1:通過左上,右上,左下,右下,左上,右上,左下,右下的“Z字形”方式連續點擊,直至彈出設置窗口來喚醒屏幕,如下圖,可進行觸摸校正(Touch Adjust),控制器IP修改,喇叭(Speaker On)操作等。
(2)方式2:連接RTSys/ZDevelop后,通過TOUCH_ADJUST指令來觸發校正。
(3)方式3:未連接RTSys/ZDevelop時,ZHD400X按下16(F6)按鍵,不松開時繼續按下11(F1)按鍵;ZHD500XB按下11(F1)按鍵,不松開時繼續按下12(F2)按鍵。
遵照顯示屏上的英文指引(Touch crosshair to calibrate),追蹤屏幕上的“十字”圖標并依次點擊操作即可。
3.連接控制器/仿真器
注:若使用方法一時示教盒掃描不到控制器IP,參考方法二。
教學視頻可點擊→“示教盒直連控制器,在示教盒刷新識別控制器IP”查看。
方法1:示教盒直連控制器,在示教盒刷新識別控制器IP
1.控制器與PC使用網口/串口連接,使用RTSys/ZDevelop軟件將程序下載到ROM中掉電保存,程序下載成功后可以斷開控制器與PC的連接。
2.用網線將示教盒和控制器連接,當使用網口通訊時,需確認示教盒與控制器IP在同一網段上。若兩者不在同一網段,可通過修改控制器IP實現。控制器默認IP為192.168.0.11,示教盒默認IP為192.168.0.10。
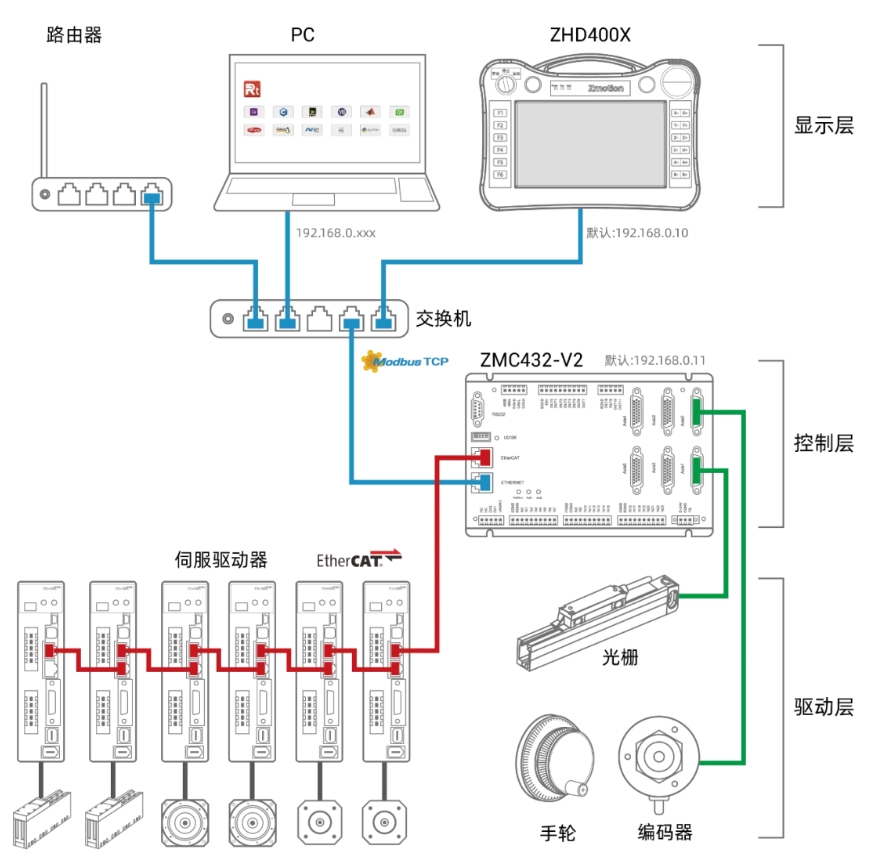
ZHD400X連接方式
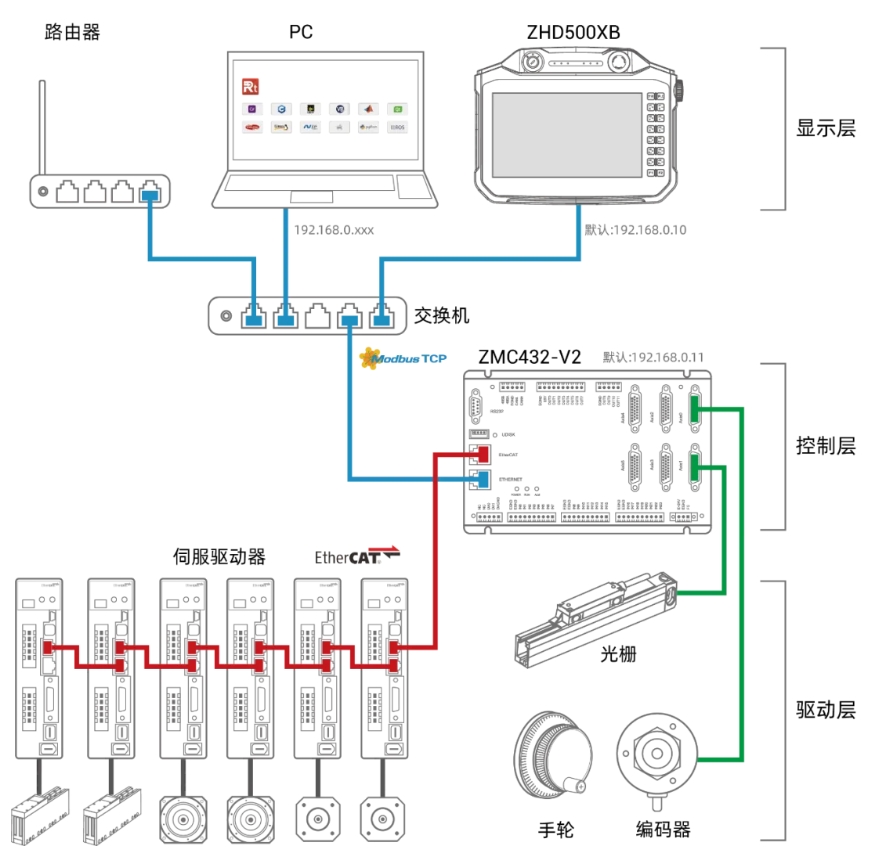
ZHD500XB連接方式
3.上電后即可在示教盒的屏上四個角,按畫Z字順序點擊,連續兩次,喚醒屏幕,彈出設置窗口。(可參考“觸摸校正-喚醒屏幕配圖”)
4.在彈出的窗口上自動獲取到當前所連接的控制器IP地址,點擊IP顯示顯示欄可以切換IP地址,確認IP無誤后,點擊Connect即可連接使用。
方法2:示教盒與PC連接,再進行示教盒與控制器的連接
1.使用交換機將示教盒、控制器和PC連接在一起(可參考“系統配置圖”),確保三者IP地址處于同一網段。
2.控制器與RTSys/ZDevelop軟件連接,將HMI程序下載到ROM中,下載成功后將控制器與RTSys/ZDevelop軟件斷開。
3.喚醒示教盒屏幕:在示教盒的屏上四個角,按畫Z字順序點擊,連續兩次,喚醒屏幕,彈出設置窗口。(可參考“觸摸校正-喚醒屏幕配圖”)
4.將示教盒和RTSys/ZDevelop 軟件連接,連接時需保證示教盒IP和電腦IP在同一個網段。
5.在RTSys/ZDevelop軟件的[在線命令]功能,發送 IP_CONNECT=控制器IP指令。發出命令后示教盒就會顯示HMI界面內容,即成功實現示教盒與控制器的連接。
6.若想要實現示教盒內程序的實時更新,在第5步的基礎上,斷開示教盒與RTSys/ZDevelop軟件的連接,將控制器與RTSys/ZDevelop軟件連接,在此期間示教盒、控制器和PC三者通過交換機連接。當程序有改動時,下載程序到控制器后,示教盒即可實時更新內容。
使用RTSys/ZDevelop軟件仿真此示教盒方法如下
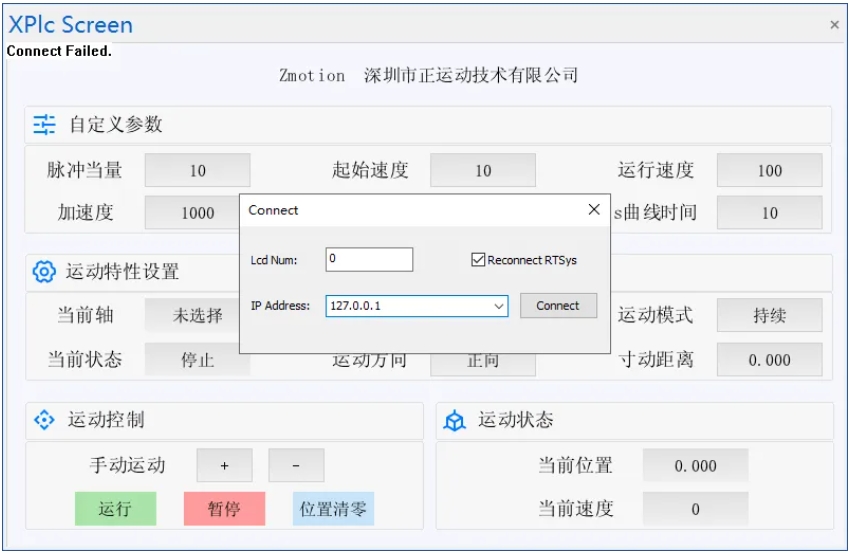
方法1:RTSys打開工程后連接到仿真器,將HMI程序下載到RAM/ROM中,打開仿真器,點擊“顯示”,既可以顯示和操作Hmi界面。
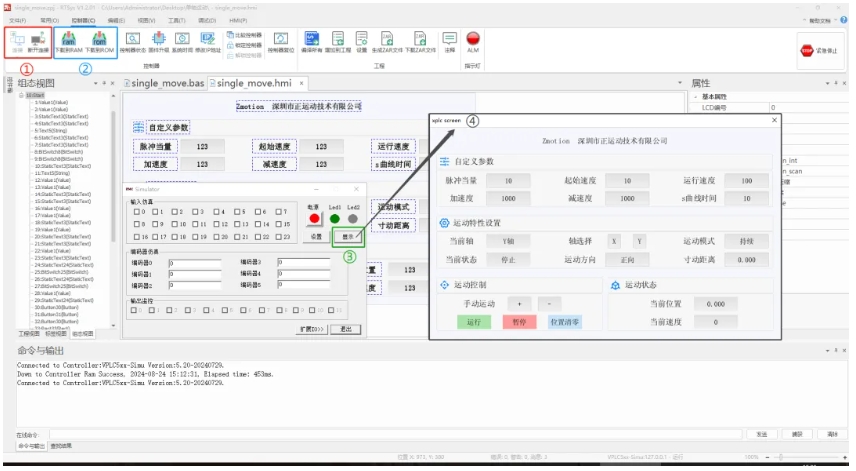
方法2:RTSys打開工程后連接到仿真器,將HMI程序下載到RAM/ROM中,在“工具”-“插件”中打開Xplc Screen,點擊任一地方彈出連接界面,選擇仿真器ip進行連接,連接成功后可以顯示和操作Hmi界面。
教學視頻可點擊→"EtherCAT運動控制器配套用手持示教盒快速入門"查看。
本次,正運動技術EtherCAT運動控制器配套用手持示教器快速入門,就分享到這里。
更多精彩內容請關注“正運動小助手”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師:400-089-8936。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
正運動技術專注于運動控制技術研究和通用運動控制軟硬件產品的研發,是國家級高新技術企業。正運動技術匯集了來自華為、中興等公司的優秀人才,在堅持自主創新的同時,積極聯合各大高校協同運動控制基礎技術的研究,是國內工控領域發展最快的企業之一,也是國內少有、完整掌握運動控制核心技術和實時工控軟件平臺技術的企業。主要業務有:運動控制卡_運動控制器_EtherCAT運動控制卡_EtherCAT控制器_運動控制系統_視覺控制器__運動控制PLC_運動控制_機器人控制器_視覺定位_XPCIe/XPCI系列運動控制卡等等。
審核編輯 黃宇
-
運動控制器
+關注
關注
2文章
408瀏覽量
24804 -
ethercat
+關注
關注
18文章
732瀏覽量
38864 -
示教器
+關注
關注
2文章
29瀏覽量
3788
發布評論請先 登錄
相關推薦






EtherCAT運動控制器與PLC的區別
什么是EtherCAT運動控制器?它有哪些特點?
EtherCAT運動控制器在LabVIEW中的運動控制與實時數據采集

EtherCAT運動控制器在ROS上的應用開發案例(上)







 工商網監
工商網監
評論