

在現(xiàn)代機(jī)器人技術(shù)中,如何感知和操控柔軟、易碎的物體(如生物組織、易碎食物及柔性電子器件)一直是一個巨大挑戰(zhàn)。現(xiàn)有的基于視覺的觸覺機(jī)器人主要集中在剛性物體的感知與操作,但在應(yīng)對柔軟或脆弱物體時,往往難以實(shí)現(xiàn)精確判斷與解析。近日,密歇根州立(MSU)林少挺研究團(tuán)隊(duì)在《Advanced Materials》上發(fā)表了一篇題為《Fatigue-Resistant Mechanoresponsive Color-Changing Hydrogels for Vision-Based Tactile Robots》的文章,創(chuàng)新性地利用了具有優(yōu)越抗疲勞特性的力致變色水凝膠,設(shè)計了一種低成本、壽命長的基于視覺的觸覺傳感器。該傳感器能夠?qū)⒔佑|表面的應(yīng)力直接轉(zhuǎn)化為可識別的圖像,從而感知材料硬度、物體形狀、空間位置及施加的壓力。這一突破有望填補(bǔ)機(jī)器人觸覺感知與人類觸覺感知之間的根本差距,推動觸覺機(jī)器人技術(shù)邁向新高度。密歇根州立大學(xué)林少挺教授為通訊作者,博士生劉佳斌為文章的第一作者。文章的其他作者包括普渡大學(xué)Yu She教授和石溪大學(xué)Wei Li教授。
如圖一所示,抗疲勞力致變色水凝膠(FMCH)由高纏結(jié)的聚合物網(wǎng)絡(luò)和適量的吸濕鹽組成,能夠在偏振光下呈現(xiàn)出可逆、穩(wěn)定且可預(yù)測的顏色變化。FMCH展現(xiàn)出優(yōu)越的機(jī)械性能,其拉伸性達(dá)到原長的6倍,斷裂韌性高達(dá)3,000 J/m2,疲勞閾值可達(dá)400 J/m2。更為重要的是,它在多達(dá)10,000次的循環(huán)拉伸下,性能穩(wěn)定,并且在應(yīng)變速率范圍為0.02 s?1至0.35 s?1的范圍內(nèi),力致變色性能始終穩(wěn)定。這種具有優(yōu)越抗疲勞特性且對應(yīng)變率不敏感的力致變色軟材料,非常適合用于需要長期承受動態(tài)負(fù)載的觸覺傳感領(lǐng)域。
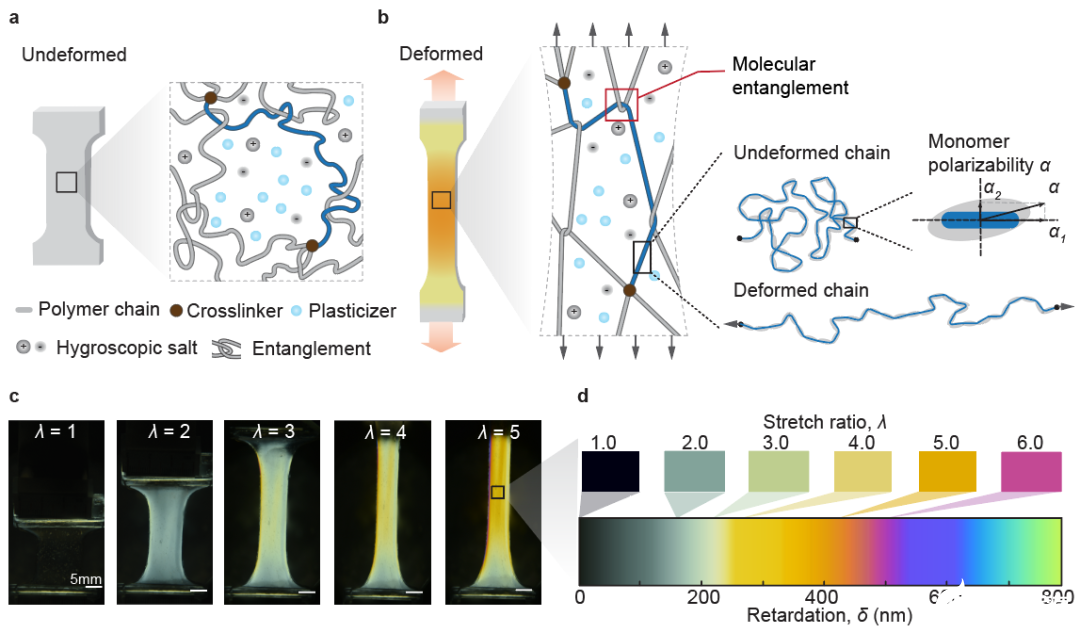
圖1. 抗疲勞力致變色水凝膠的分子設(shè)計
如圖二所示,基于力致變色水凝膠的觸覺傳感器采用反射光彈性原理,通過一種不透明、應(yīng)變不敏感且對波長不敏感的可拉伸反射膜,進(jìn)而實(shí)現(xiàn)將相機(jī)和光源安置在同一側(cè),從而精準(zhǔn)采集接觸表面的應(yīng)力圖像。該傳感器設(shè)計緊湊,尺寸靈活可調(diào),并且能夠輕松集成到各種機(jī)器人系統(tǒng)中。通過對不同幾何形狀、機(jī)械模量以及放置角度的物體進(jìn)行壓痕測試,傳感器采集到的圖像能夠輕松區(qū)分物體的幾何形狀、空間位置、施加的壓力以及材料的軟硬度。與ABAQUS仿真結(jié)果對比顯示,傳感器采集的圖像無需復(fù)雜數(shù)據(jù)處理,便能反映接觸面的應(yīng)力分布。該觸覺傳感器不僅結(jié)構(gòu)簡單、成本低廉,且采集的圖像包含豐富的應(yīng)力信息。這種基于視覺的觸覺傳感器,融合了軟材料設(shè)計、光學(xué)系統(tǒng)工程和觸覺機(jī)器人技術(shù)所構(gòu)建的多學(xué)科優(yōu)勢,為突破現(xiàn)有機(jī)器人感知與操作能力極限提供了基礎(chǔ)工具,是下一代觸覺傳感器的理想選擇。
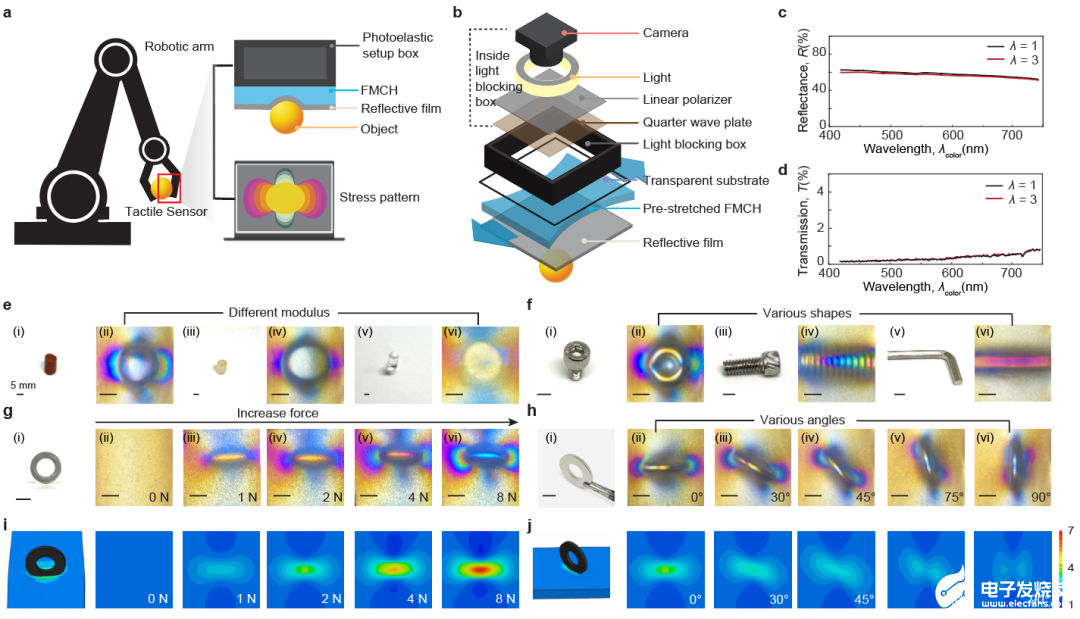
圖2. 抗疲勞力致變色水凝膠的分子設(shè)計在觸覺機(jī)器人領(lǐng)域的應(yīng)用 軟材料領(lǐng)域:這項(xiàng)工作揭示了一種基于理論指導(dǎo)的聚合物分子設(shè)計新策略,以協(xié)調(diào)軟材料的機(jī)械性能和光學(xué)特性。 軟體機(jī)器人領(lǐng)域:這項(xiàng)工作報告了一種全新的基于視覺的觸覺機(jī)器人,以填補(bǔ)機(jī)器人觸覺感知與人類觸覺感知之間的關(guān)鍵差距。 觸覺感知領(lǐng)域:這項(xiàng)工作提供了一種跨學(xué)科的基礎(chǔ)工具,有助于為觸覺感知的生物學(xué)機(jī)制提供新的科學(xué)見解。
來源:高分子材料科學(xué)
聲明:轉(zhuǎn)載此文是出于傳遞更多信息之目的,若有來源標(biāo)注措誤或侵犯了您的合法權(quán)益,請與我們聯(lián)系,我們將及時更正、刪除,謝謝。
-
觸覺傳感器
+關(guān)注
關(guān)注
4文章
94瀏覽量
9501
發(fā)布評論請先 登錄
相關(guān)推薦
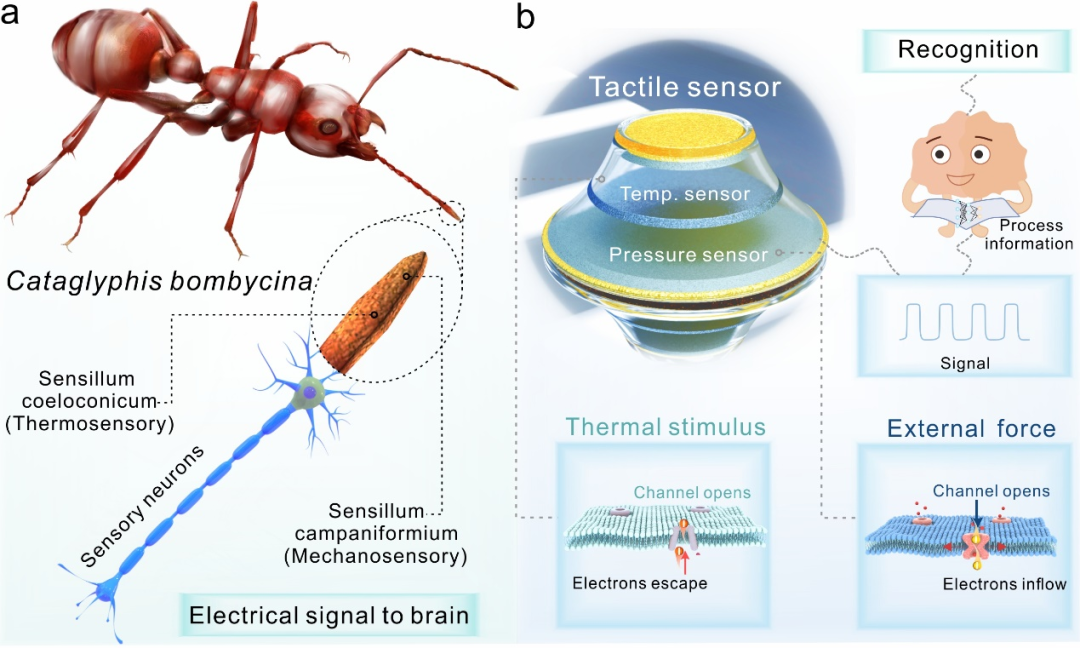
仿生觸覺傳感器:觸碰未來的科技奇跡
廣西大學(xué):用于高溫應(yīng)用中的壓力和溫度傳感的摩擦電觸覺傳感器
由3D石墨烯泡沫集成水凝膠實(shí)現(xiàn)的固有可拉伸運(yùn)動傳感器
3D石墨烯泡沫與水凝膠集成,打造本質(zhì)可拉伸運(yùn)動傳感器
提出紙做的觸覺傳感器
北京化工大學(xué),中國石化北京化工研究院:一種用于柔性應(yīng)變傳感器的高拉伸、自愈、自粘聚丙烯酸/殼聚糖多

南京大學(xué):研發(fā)水凝膠傳感器動態(tài)保水新策略

密歇根大學(xué)研究出新型固態(tài)存儲設(shè)備 可耐600°C高溫
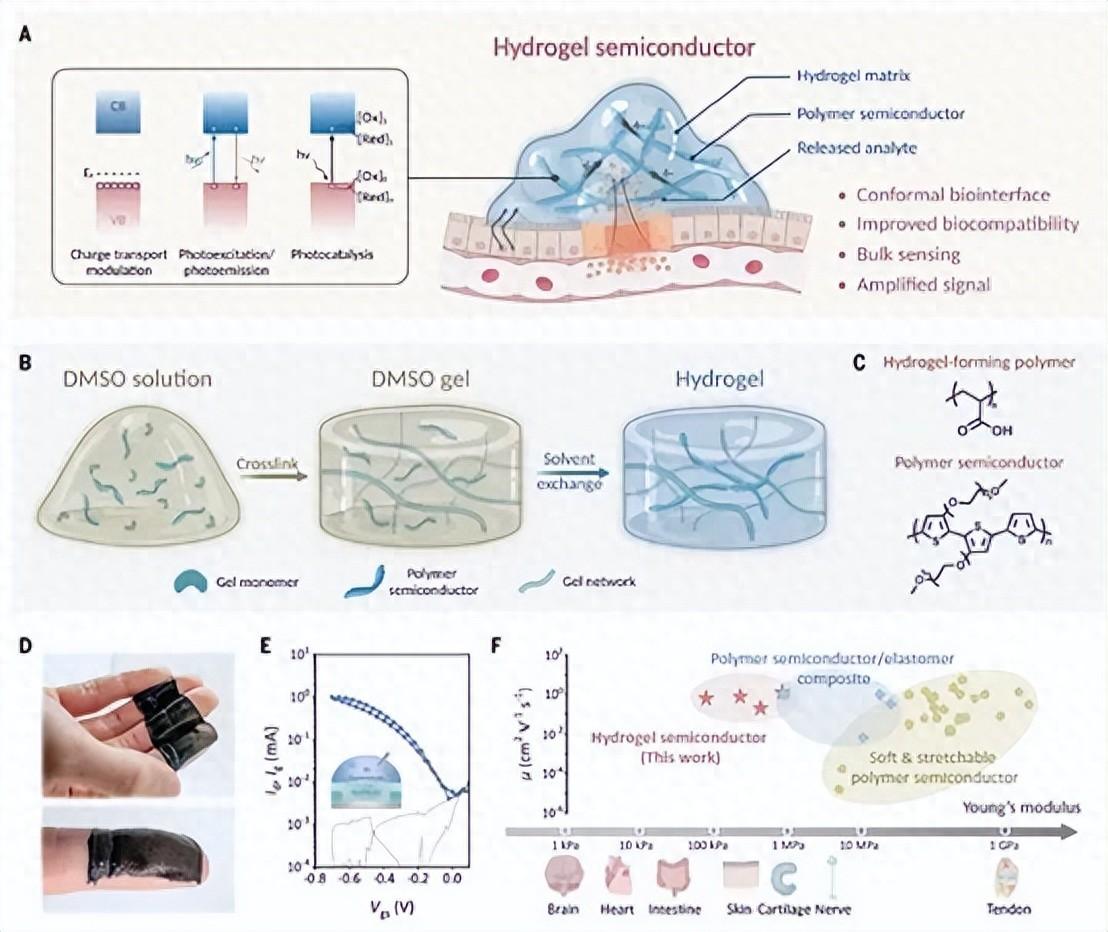
水凝膠半導(dǎo)體材料問世,有望用于生物集成電路
觸覺傳感器的發(fā)展,對機(jī)器人產(chǎn)業(yè)有什么影響?
如何給多個X+Y(12pin),pitch0.5mm的接口的觸覺傳感器設(shè)計電路板?
北卡羅來納州立大學(xué):加速外骨骼機(jī)器人控制系統(tǒng)的研發(fā)
華中科技大學(xué)研發(fā)微型傳感器 可注入體內(nèi)并降解
華中科技大學(xué)研發(fā)微型傳感器,索尼預(yù)測其圖像傳感器市場份額明年將突破 60%
賓夕法尼亞州立大學(xué)與摩根先進(jìn)材料有限公司合作改進(jìn)半導(dǎo)體材料






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論