
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個固定的角度(即步進(jìn)角)。您可以通過控制脈沖個數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時您可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動的速度和加速度,從而達(dá)到調(diào)速的目的。
步進(jìn)電機(jī)分三種:永磁式(PM) ,反應(yīng)式(VR)和混合式(HB)。永磁式步進(jìn)一般為兩相,轉(zhuǎn)矩和體積較小,步進(jìn)角一般為7.5度 或15度;反應(yīng)式步進(jìn)一般為三相,可實(shí)現(xiàn)大轉(zhuǎn)矩輸出,步進(jìn)角一般為1.5度,但噪聲和振動都很大。在歐美等發(fā)達(dá)國家80年代已被淘汰;混合式步進(jìn)是指混合了永磁式和反應(yīng)式的優(yōu)點(diǎn)。它又分為兩相和五相:兩相步進(jìn)角一般為1.8度而五相步進(jìn)角一般為0.72度。混合式步進(jìn)電機(jī)的應(yīng)用最為廣泛200步進(jìn)電機(jī)與伺服電機(jī)333332首次關(guān)注51黑電子論壇及“單片機(jī)教程網(wǎng)”官方微信獲得的論壇黑幣獎勵.
步進(jìn)電機(jī)的基本參數(shù):
1.電機(jī)固有步距角
它表示控制系統(tǒng)每發(fā)一個步進(jìn)脈沖信號,電機(jī)所轉(zhuǎn)動的角度。電機(jī)出廠時給出了一個步距角的值,如86BYG 250A型電機(jī)給出的值為0.9°/1.8°(表示半步工作時為0.9°、整步工作時為1.8°),這個步距角可以稱之為‘電機(jī)固有步距角’,它不一定是電機(jī)實(shí)際工作時的真正步距角,真正的步距角和驅(qū)動器有關(guān)。
通常步進(jìn)電機(jī)步距角β的一般計算按下式計算。
β=360°/(Z·m·K)
式中 β―步進(jìn)電機(jī)的步距角;
Z―轉(zhuǎn)子齒數(shù);
m―步進(jìn)電動機(jī)的相數(shù);
K―控制系數(shù),是拍數(shù)與相數(shù)的比例系數(shù)
2.步進(jìn)電機(jī)的相數(shù)
是指電機(jī)內(nèi)部的線圈組數(shù),目前常用的有二相、三相、四相、五相步進(jìn)電機(jī)。電機(jī)相數(shù)不同,其步距角也不同,一般二相電機(jī)的步距角為0.9°/1.8°、三相的為0.75°/1.5°、五相的為0.36°/0.72° 。在沒有細(xì)分驅(qū)動器時,用戶主要靠選擇不同相數(shù)的步進(jìn)電機(jī)來滿足自己步距角的要求。如果使用細(xì)分驅(qū)動器,則‘相數(shù)’將變得沒有意義,用戶只需在驅(qū)動器上改變細(xì)分?jǐn)?shù),就可以改變步距角。
3.保持轉(zhuǎn)矩(HOLDING TORQUE)
是指步進(jìn)電機(jī)通電但沒有轉(zhuǎn)動時,定子鎖住轉(zhuǎn)子的力矩。它是步進(jìn)電機(jī)最重要的參數(shù)之一,通常步進(jìn)電機(jī)在低速時的力矩接近保持轉(zhuǎn)矩。由于步進(jìn)電機(jī)的輸出力矩隨速度的增大而不斷衰減,輸出功率也隨速度的增大而變化,所以保持轉(zhuǎn)矩就成為了衡量步進(jìn)電機(jī)最重要的參數(shù)之一。比如,當(dāng)人們說2N.m的步進(jìn)電機(jī),在沒有特殊說明的情況下是指保持轉(zhuǎn)矩為2N.m的步進(jìn)電機(jī)。
DETENT TORQUE:是指步進(jìn)電機(jī)沒有通電的情況下,定子鎖住轉(zhuǎn)子的力矩。DETENTTORQUE 在國內(nèi)沒有統(tǒng)一的翻譯方式,容易使大家產(chǎn)生誤解;由于反應(yīng)式步進(jìn)電機(jī)的轉(zhuǎn)子不是永磁材料,所以它沒有DETENTTORQUE。
步進(jìn)電機(jī)主要特性
1. 步進(jìn)電機(jī)必須加驅(qū)動才可以運(yùn)轉(zhuǎn), 驅(qū)動信號必須為脈沖信號,沒有脈沖的時候, 步進(jìn)電機(jī)靜止, 如果加入適當(dāng)?shù)拿}沖信號,就會以一定的角度(稱為步角)轉(zhuǎn)動。轉(zhuǎn)動的速度和脈沖的頻率成正比。例如步進(jìn)電機(jī)的步進(jìn)角度為7.5 度,一圈360 度, 需要48 個脈沖完成。
2. 步進(jìn)電機(jī)具有瞬間啟動和急速停止的優(yōu)越特性。
3. 改變脈沖的順序,可以方便的改變轉(zhuǎn)動的方向。
因此,目前打印機(jī),繪圖儀,機(jī)器人,等設(shè)備都以步進(jìn)電機(jī)為動力核心。
步進(jìn)電機(jī)驅(qū)動器的特點(diǎn)
它是構(gòu)成步進(jìn)電機(jī)驅(qū)動器系統(tǒng)的專用集成電路:
A、脈沖分配器集成電路:如三洋公司的PMM8713、PMM8723、PMM8714等。
B、包含脈沖分配器和電流斬波的控制器集成電路:如SGS公司的L297、L6506等。
C、只含功率驅(qū)動(或包含電流控制、保護(hù)電路)的驅(qū)動器集成電路:如日本新電元工業(yè)公司的MTD1110(四相斬波驅(qū)動)和MTD2001(兩相、H橋、斬波驅(qū)動)。
D、將脈沖分配器、功率驅(qū)動、電流控制和保護(hù)電路都包括在內(nèi)的驅(qū)動控制器集成電路,如東芝公司的TB6560AHQ、MOTOROLA公司的SAA1042(四相)和ALLEGRO公司的UCN5804(四相)等。
“細(xì)分驅(qū)動”概述: 將“電機(jī)固有步距角”細(xì)分成若干小步的驅(qū)動方法,稱為細(xì)分驅(qū)動,細(xì)分是通過驅(qū)動器精確控制步進(jìn)電機(jī)的相電流實(shí)現(xiàn)的,與電機(jī)本身無關(guān)。其原理是,讓定子通電相電流并不一次升到位,而斷電相電流并不一次降為0(繞組電流波形不再是近似方波,而是N級近似階梯波),則定子繞組電流所產(chǎn)生的磁場合力,會使轉(zhuǎn)子有N個新的平衡位置(形成N個步距角)。
伺服馬達(dá)
伺服馬達(dá)內(nèi)部結(jié)構(gòu)
伺服馬達(dá)內(nèi)部包括了一個小型直流馬達(dá);一組變速齒輪組;一個反饋可調(diào)電位器;及一塊電子控制板。其中,高速轉(zhuǎn)動的直流馬達(dá)提供了原始動力,帶動變速(減速)齒輪組,使之產(chǎn)生高扭力的輸出,齒輪組的變速比愈大,伺服馬達(dá)的輸出扭力也愈大,也就是說越能承受更大的重量,但轉(zhuǎn)動的速度也愈低。其結(jié)構(gòu)圖如下:
伺服馬達(dá)的工作原理
伺服馬達(dá)是一個典型閉環(huán)反饋系統(tǒng),其原理可由下圖:
減速齒輪組由馬達(dá)驅(qū)動,其終端(輸出端)帶動一個線性的比例電位器作位置檢測,該電位器把轉(zhuǎn)角坐標(biāo)轉(zhuǎn)換為一比例電壓反饋給控制線路板,控制線路板將其與輸入的控制脈沖信號比較,產(chǎn)生糾正脈沖,并驅(qū)動馬達(dá)正向或反向地轉(zhuǎn)動,使齒輪組的輸出位置與期望值相符,令糾正脈沖趨于為0,從而達(dá)到使伺服馬達(dá)精確定位的目的。
如何控制伺服馬達(dá)
標(biāo)準(zhǔn)的微型伺服馬達(dá)有三條控制線,分別為:電源、地、控制。電源線與地線用于提供內(nèi)部的直流馬達(dá)及控制線路所需的能源,電壓通常介于4V—6V之間,該電源應(yīng)盡可能與處理系統(tǒng)的電源隔離(因?yàn)樗欧R達(dá)會產(chǎn)生噪音)。甚至小伺服馬達(dá)在重負(fù)載時也會拉低放大器的電壓,所以整個系統(tǒng)的電源供應(yīng)的比例必須合理。
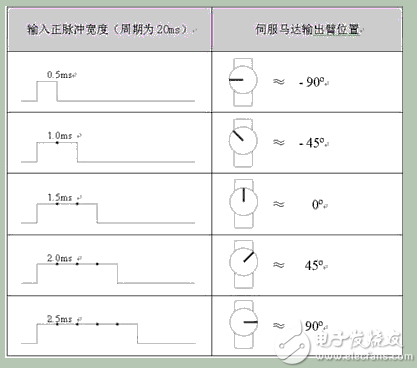
輸入一個周期性的正向脈沖信號,這個周期性脈沖信號的高電平時間通常在1ms—2ms之間,而低電平時間應(yīng)在5ms到20ms之間,并不很嚴(yán)格,下表表示出一個典型的20ms周期性脈沖的正脈沖寬度與微型伺服馬達(dá)的輸出臂位置的關(guān)系:
伺服馬達(dá)的電源引線
電源引線有三條,如圖中所示。伺服馬達(dá)三條線中紅色的線是控制線,接到控制芯片上。中間的是SERVO工作電源線,一般工作電源是5V。 第三條是地線。
伺服馬達(dá)的運(yùn)動速度
伺服馬達(dá)的瞬時運(yùn)動速度是由其內(nèi)部的直流馬達(dá)和變速齒輪組的配合決定的,在恒定的電壓驅(qū)動下,其數(shù)值唯一。但其平均運(yùn)動速度可通過分段停頓的控制方式來改變,例如,我們可把動作幅度為90o的轉(zhuǎn)動細(xì)分為128個停頓點(diǎn),通過控制每個停頓點(diǎn)的時間長短來實(shí)現(xiàn)0o—90o變化的平均速度。對于多數(shù)伺服馬達(dá)來說,速度的單位由“度數(shù)/秒”來決定。
使用伺服馬達(dá)的注意事項(xiàng)
除非你使用的是數(shù)碼式的伺服馬達(dá),否則以上的伺服馬達(dá)輸出臂位置只是一個不準(zhǔn)確的大約數(shù)。普通的模擬微型伺服馬達(dá)不是一個精確的定位器件,即使是使用同一品牌型號的微型伺服馬達(dá)產(chǎn)品,他們之間的差別也是非常大的,在同一脈沖驅(qū)動時,不同的伺服馬達(dá)存在±10o的偏差也是正常的。
正因上述的原因,不推薦使用小于1ms及大于2ms的脈沖作為驅(qū)動信號,實(shí)際上,伺服馬達(dá)的最初設(shè)計表也只是在±45o的范圍。而且,超出此范圍時,脈沖寬度轉(zhuǎn)動角度之間的線性關(guān)系也會變差。要特別注意,絕不可加載讓伺服馬達(dá)輸出位置超過±90o的脈沖信號,否則會損壞伺服馬達(dá)的輸出限位機(jī)構(gòu)或齒輪組等機(jī)械部件。
-
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3139瀏覽量
148632 -
伺服電機(jī)
+關(guān)注
關(guān)注
86文章
2082瀏覽量
58870
發(fā)布評論請先 登錄
相關(guān)推薦
伺服系統(tǒng)與步進(jìn)電機(jī)的區(qū)別 如何選擇合適的伺服系統(tǒng)
行星減速步進(jìn)電機(jī)與步進(jìn)電機(jī)的區(qū)別

伺服電機(jī)與步進(jìn)電機(jī)的性能比較區(qū)別有哪些?
步進(jìn)電機(jī)的伺服控制方法有哪些
步進(jìn)電機(jī)伺服控制系統(tǒng)的作用
絲桿步進(jìn)電機(jī)和普通步進(jìn)電機(jī)有什么區(qū)別
絲桿步進(jìn)電機(jī)和步進(jìn)電機(jī)有什么區(qū)別?
一文分清普通電機(jī)、減速電機(jī)、步進(jìn)電機(jī)、舵機(jī)、伺服電機(jī)的區(qū)別

直流伺服電機(jī)和交流伺服電機(jī)的差異
伺服電機(jī)與步進(jìn)電機(jī)|兩種電機(jī)的關(guān)鍵區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論