 事件驅動和鍵盤管理設計案例分析
事件驅動和鍵盤管理設計案例分析
周立功教授新書《面向AMetal框架與接口的編程(上)》,對AMetal框架進行了詳細介紹,通過閱讀這本書,你可以學到高度復用的軟件設計原則和面向接口編程的開發思想,聚焦自己的“核心域”,改變自己的編程思維,實現企業和個人的共同進步。
第四章為面向接口的編程,本文內容包括:4.4 事件驅動和4.5 鍵盤管理。
4.4 事件驅動
>>> 4.4.1 中斷與事件驅動
1. 中斷
到目前為止,幾乎所有的程序都依賴輪詢通信。那些代碼只是一遍一遍地巡檢外圍功能部件,并在需要的時候為外圍設備提供服務。可想而知,輪詢訪問不僅消耗了大量的 MCU資源,而且將導致非常不穩定的反應時間。
為了有效地解決上述可能導致整個系統癱瘓的問題,計算機專家提出了一種“實時”的解決方案,通過“中斷”使可預見的反應時間維持在幾微秒之內。所謂中斷是指當 MCU 正在處理某件事情的時候,外部發生的某一“事件”請求 MCU 迅速去處理,于是 MCU 暫時中止當前的工作,轉去處理所發生的事件。當中斷服務處理完該事件以后,再回到原來被中止的地方繼續原來的工作。
但也有可能突發事務請求中斷時,可能出現在正常程序流程的任何地方,在正常程序流程中可以選擇響應或不響應這個中斷請求,突發事件的處理可能會改變整個程序的狀態,從而也改變了后續的正常程序流程。
比如,在一次會議上你正在按照計劃做報告,這時手機鈴聲響了,此時,你有兩種選擇,一是你覺得正在進行的報告更重要,你可以掛斷電話或干脆關機,等會后再去處理這個來電;二是你認為這個電話很重要或很快就可處理完畢(不影響做報告),你可以暫停報告轉而接聽這個電話,當接聽完畢后,你再繼續做報告,前提是你必須記住接電話前講到哪里了,當然如果你足夠機敏的話,在這次通話中你所接收到的信息可能會改變你隨后的報告內容。
由此可見,通過中斷方式允許系統在執行主程序時可以響應并處理其它任務,進而中斷驅動系統給人們一種假象,MCU 可以同時執行多個任務。而事實上 MCU 不能同時執行 1條以上的指令,它只是暫停主程序轉去執行其它程序,完成后再返回繼續執行主程序。
從這個角度來看,中斷響應非常類似于函數的調用過程。它們兩者之間的差別在于中斷的響應是由“事件”發起的,而不像函數調用那樣,它是在主程序流程中預先設定的,中斷是系統響應一些和主程序異步事件,這些事件何時將主程序中斷是預先未知的。有了中斷就可以實現主機與外設并行工作,支持多程序并發運行,支持實時處理功能。
2. 事件驅動
在現實生活中,“發生的某件事情”就是事件,事實上很多程序都對“發生的事情”做出反應。比如,移動或點擊鼠標、按鍵、或經過一定的時間都是基于事件的驅動程序。
事件驅動程序只是“原地不動”,什么也不做,等待有事件發生,一旦事件確實發生了,它們就會做出反應,完成所有必要的工作來處理這個事件。其實,Windows 操作系統就是事件驅動程序的一個很好的示例,當啟動計算機運行 Windows 時,它只是“原地不動”,不會啟動任何程序,你也不會看到鼠標光標在屏幕上移動。不過,如果你開始移動或點擊鼠標,就會有情況發生。
為了讓事件驅動程序“看到”有事件發生,它必須“尋找”這些事件,程序必須不斷地掃描計算機內存中用于事件發生的部分,即只要程序在運行就會不斷尋找事件。顯然,只要移動或點擊了鼠標或按下了按鍵,就會發生事件,這些事件在哪里呢?比如,在內存中存儲事件的部分就是事件隊列,事件隊列就是發生的所有事件的列表,這些事件按它們發生的順序排列。
如果需要編寫一個游戲,則程序必須知道用戶什么時候按下一個按鍵或移動了鼠標。而這些按鍵動作、點擊或移動鼠標都是事件,而且程序必須知道如何應對這些事件,它必須處理事件,程序中處理某個事件的部分稱為 事件處理器。而事實上并不是發生的每一個事件都要處理,比如,在桌面移動鼠標就會產生成百上千個事件,因為事件循環運行得非常快。每一個瞬間即使鼠標只是移動了一點點,也會生成一個新的事件。不過你的程序可能并不關心鼠標的每一個小小的移動,它可能只關心用戶什么時候點擊某個部分,因此你的程序可以忽略鼠標移動事件,只關注鼠標點擊事件。
事件驅動程序中,對于所關心的各種事件會有相應的事件處理器。如果你有一個游戲使用鍵盤上的方向來控制一艘船的移動,可能要為 keyDown 事件寫一個處理器;相反,如果使用鼠標控制這艘船,就可能為 mouseMove 事件寫一個事件處理器。
另一種有用的事件是軟件定時器事件,定時器會按設定的間隔生成事件,就像鬧鐘一樣,如果設定好鬧鐘,并將鬧鐘打開,每天它都會在固定的時刻響起來。比如,(宏觀上)同時處理兩個事件。其中,一個為鍵盤輸入事件,另一個為時間事件,用于顯示運行的時間,每秒顯示一次。
顯然,可以在 main()函數設置一個循環,依次檢查是否有鍵盤輸入和時間是否到 1 秒?其實都可以直接調用固定的函數來實現“鍵盤輸入處理代碼”和“時間處理代碼”,但這樣不夠靈活,此時可以用中斷機制來實現,即由硬件來實現對事件的檢測并調用指定的函數,這樣一來使用注冊回調函數機制也就成為了必然。而注冊回調函數就是事先用一個函數指針變量保存指定的函數,然后在事件發生時,通過這個函數指針變量調用指定的函數。
>>>4.4.2 軟件定時器
我們知道,數碼管顯示主要做兩件事,其一,每隔 5ms 調用一次 digitron_disp_scan()動態掃描顯示函數,其次,當需要改變顯示內容時,則調用緩沖區操作接口,修改緩沖區中的內容。由于 MCU 設計了類似于鬧鐘那樣的特定性的周期性的中斷時鐘節拍源,因此由時鐘節拍源實現的定時器也是一個周期性的定時器,并產生周期性的中斷,這個中斷可以看做系統心臟的脈動。即當計數值等于定時時間時,則定時器立即觸發中斷,計數器重新開始計數,如此周而復始循環計數。
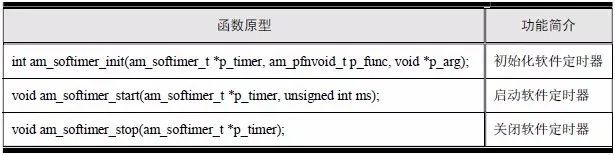
顯然,可以使用定時器的周期性的中斷實現自動掃描顯示,即每隔 5ms 觸發中斷自動調用 digitron_disp_scan(),這樣就可以將 MCU 解放出來執行其它的任務,從而得到更好的性能,其相應的接口函數詳見表 4.3。程序員先調用軟件定時器函數,然后等待操作完成。通常程序員提供一個由函數指針指定的回調函數,當操作完成后,中斷系統會調用回調函數。
表 4.3 軟件定時器接口函數
1. am_softimer_t 類型
從面向對象的角度來看,類相當于 C 語言的結構體,這里的 am_softimer_t 是用 typedef自定義的一個對用戶隱藏的結構體類型。即:

在使用軟件定時器時,需要使用該類型定義一個軟件定時器實例(對象),實例的本質是定義一個結構體變量。比如:

顯然,對象是類型的實例,即 timer 是 am_softimer_t 類型的一個實例。
2. 初始化軟件定時器
事先將指定的函數保存在函數指針 p_func 中(注冊),當定時時間到時,則通過 p_func調用指定的函數,即注冊函數回調機制。

其中的 p_timer 為使用 am_softimer_t 類型定義的軟件定時器實例,當定時時間到,則調用 p_func 指向的函數(注冊回調函數),am_pfnvoid_t 是 AMetal 聲明的函數指針類型,其定義(am_types.h)如下:

由此可見,p_func 指向的函數類型是無返回值,具有一個 void*型參數的函數。p_arg為用戶自定義的參數,在定時時間到調用回調函數時,會將此處設置的 p_arg 作為作為參數傳遞給回調函數;如果不使用此參數,則設置為 NULL。如果返回 AM_OK,說明軟件定時器初始化成功;如果返回-AM_EINVAL,說明由于參數錯誤導致初始化失敗。初始化函數的使用范例詳見程序清單 4.26。
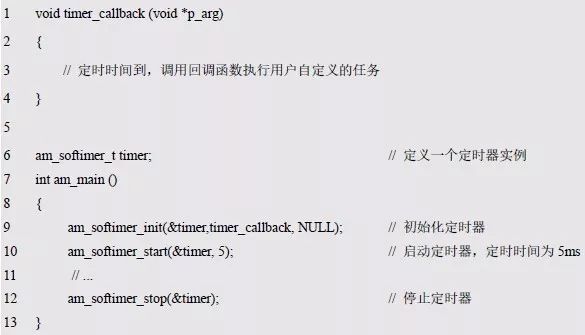
程序清單 4.26 am_softimer_init ()函數范例程序
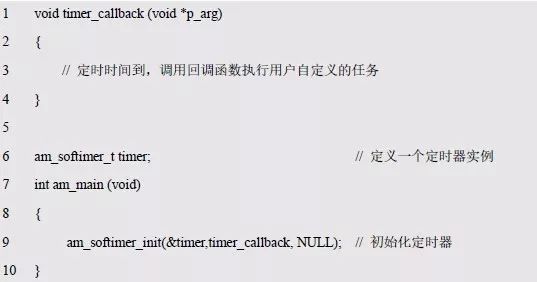
其中的 am_softtimer_init()函數(A)與用戶自定義的任務函數(C)同屬于上層模塊的函數,timer_callback()函數(B)為下層模塊的函數。由于事先已經將 timer_callback()的地址 time_callback 保存在 p_func 中了,因此,當 am_softtimer_init()調用 timer_callback()時,僅需將用戶自定義的任務函數的入口地址作為實參傳遞給 timer_callback()的形參,即可通過函數指針變量 p_arg 在某個時刻回調用戶自定義的任務函數,即在函數 A 調用函數 B 中直接調用回調函數 C。即只要在每次調用 timer_callback()時,給出不同的函數名作為實參,即可回調相應的函數,卻不必修改 timer_callback()。
3. 啟動軟件定時器
啟動定時器并設置定時時間(單位 ms),然后定時器開始計數。當計數值等于定時時間時,則定時器立即觸發中斷,計數器重新開始計數,如此周而復始循環計數。當定時器觸發中斷時,則程序跳轉到調用 am_softimer_init()時 p_func 指向的函數,其函數原型為:

p_timer 為使用 am_softimer_t 類型定義的軟件定時器實例,ms 為定時時間,單位 ms。如果返回 AM_OK,說明啟動定時器成功;如果返回-AM_EINVAL,說明失敗參數錯誤。設置定時器以實現數碼管自動掃描顯示的代碼詳見程序清單 4.27。
程序清單 4.27 自動掃描顯示實現
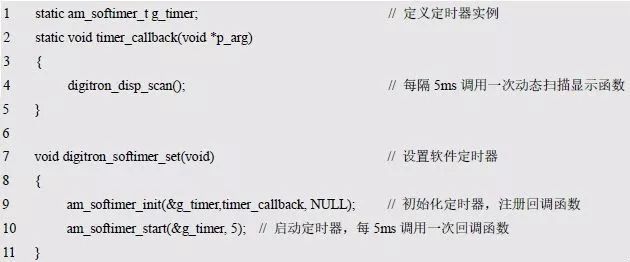
程序中,digitron_softimer_set()函數初始化并啟動了一個軟件定時器,并在定時器回調函數中調用了數碼管掃描函數,進而實現了數碼管自動掃描。
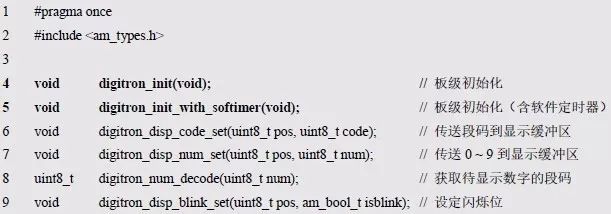
為了更方便的使用自動掃描,可以將 digitron_softimer_set()合并到 digitron_init()中,形成一個新的 digitron_init_with_softimer(),當用戶需要數碼管初始化后自動掃描時,只需調用該帶軟件定時器的初始化函數即可,詳見程序清單 4.28。
程序清單 4.28 digitron1.h 文件內容
如程序清單 4.29 所示為再次迭代的 0~59 秒循環顯示程序。
程序清單 4.29 0~59 秒計數器范例程序(3)

既然程序是每隔 1s 計數器加 1 后更新緩沖區數據的,那么同樣可以使用軟件定時器實現每秒加 1 的操作,迭代后的代碼詳見程序清單 4.30。
程序清單 4.30 0~59 秒計數器范例程序(4)
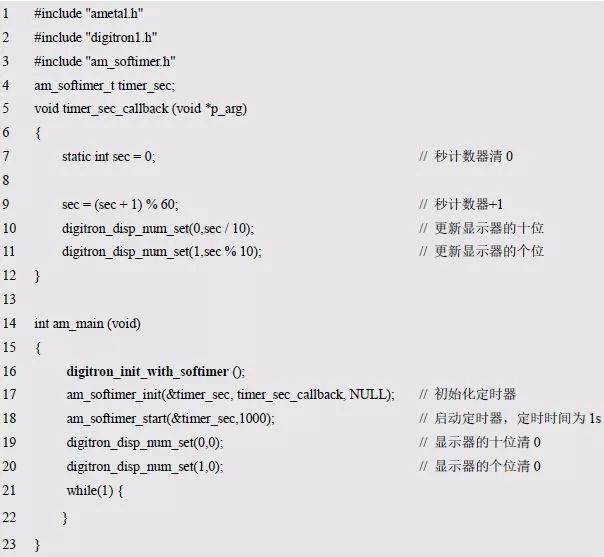
當啟動軟件定時器后,秒計數器加1和更新緩沖區數據的工作自動在timer_sec_callback()函數中完成,不再需要主程序干預。現在 while(1)主循環什么事情都不用做,同樣實現了 0~59的循環顯示。這樣一來,數碼管就會獨立地工作了,那么在 while(1)主循環中,就可以直接去做其它事情。以后遇到“每隔一定時間做某件事”的問題,均可使用軟件定時器來實現。
雖然用軟件定時器實現自動掃描顯示的方法非常巧妙,流程也更加清晰,且程序還可以去做其它的事情,但卻是以犧牲程序空間為代價的,即軟件定時器要占用一個硬件定時器,以及 438 個字節的 Flash 和 12 個字節的 RAM。同時在使用軟件定時器時,由于新建一個軟件定時器必須定義一個定時器實例,每個定時器實例還要占用 24 字節,因此要根據硬件資源做出取舍。
4. 關閉軟件定時器
當軟件定時器關閉時,如果再次啟動,則調用 am_softimer_start()重新啟動。即:

其中的 p_timer 為使用 am_softimer_t 類型定義的軟件定時器實例,如果返回 AM_OK,說明停止定時器;如果返回-AM_EINVAL,即參數錯誤導致關閉失敗,詳見程序清單 4.31。
程序清單 4.31 am_softimer_stop ()范例程序
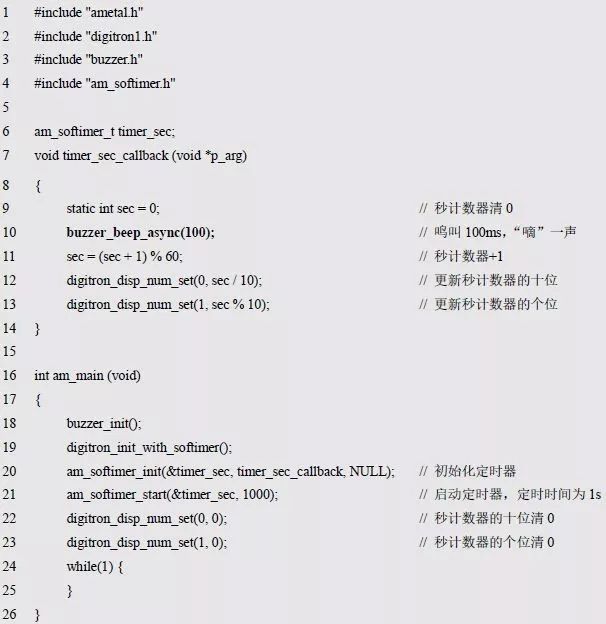
現在不妨在程序清單 4.30 的基礎上,再增加一個小功能,即每秒加一、蜂鳴器“嘀”一聲,詳見程序清單 4.32。
程序清單 4.32 0~59 秒計數器+蜂鳴器綜合范例程序(1)
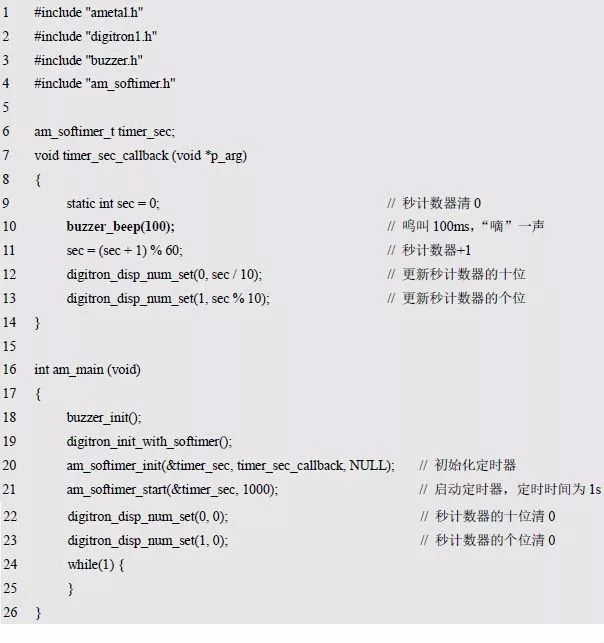
通過運行發現,雖然計數器在每秒加 1 時,蜂鳴器也會發出“嘀”的一聲,但數碼管的某位卻會熄滅一下。如果覺得看起來還不夠明顯,不妨將蜂鳴器的鳴叫時間增加到 500ms。奇怪!為何連顯示都不正常了呢?
雖然此前在 main()函數的 while(1)主循環中也使用了延時,但在主程序的延時期間,軟件定時器定時時間到而產生的中斷事件是可以搶占 MCU 的,所以不會影響其它事件的繼續運行。如果在中斷環境中調用 buzzer_beep(),程序必須等到蜂鳴器鳴叫結束后才會返回,這樣一來就會使回調函數產生 100ms 的延時,從而導致 MCU 被完全占用,不僅 while(1)主循環無法執行,而且連其它的中斷事件也無法執行。比如,另一個軟件定時器中的數碼管動態掃描也就無法執行了,所以在這 100ms 時間內,無法實現數碼管動態掃描,于是只有一個數碼管顯示,另外一個數碼管無法顯示而處于熄滅的狀態。
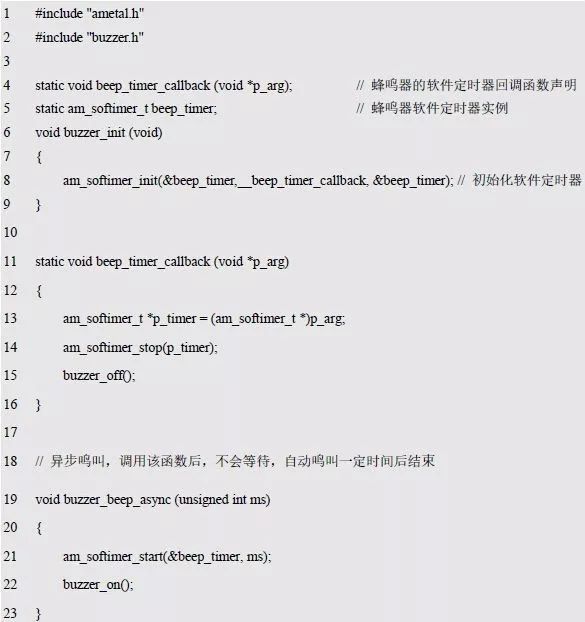
在這種情況下,應盡可能地將相應功能設計為異步模式,即啟動軟件定時器,設定蜂鳴器鳴叫時間,打開蜂鳴器,函數立即返回。待定時時間到,則自動調用回調函數,然后在回調函數中關閉蜂鳴器并停止定時器。這就是使用軟件定時器實現 buzzer_beep_async()的由來,異步模式的優點是無需等待,函數立即返回,即可在任意地方調用該函數了,再也不會因為
延時而帶來副作用,詳見程序清單 4.33。
程序清單 4.33 實現蜂鳴器異步鳴叫函數
基于此,將 buzzer_beep_async()添加到 buzzer.h 以利于復用,詳見程序清單 4.34。
程序清單 4.34 0~59 秒計數器+蜂鳴器綜合范例程序(2)
4.5 鍵盤管理
>>> 4.5.1 獨立按鍵
1. 消抖方法
對于質量不太好或者長期使用簧片氧化磨損的按鍵來說,常常會產生一種被稱為“抖動”的現象。如圖 4.12(a)所示為單觸點按鍵的無消抖電路,當按鍵未按下時,則輸出 Y 為高電平;當按下時,則輸出 Y 為低電平。但由于按鍵的機械特性和人手指的不穩定性等綜合因素,致使按鍵盤剛按下的瞬間,因接觸不良而產生的反復跳動現象,即“抖動”,同樣在按鍵釋放的瞬間也可能產生“抖動”,結果輸出 Y 在這一瞬間產生了多個窄脈沖干擾,這些脈沖信號的寬度一般可達毫秒,詳見圖 4.12 (b)。
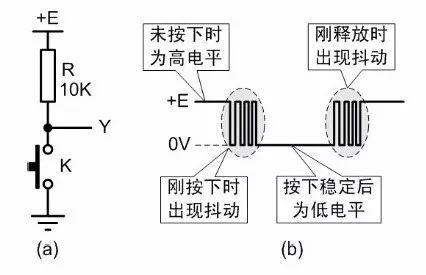
圖 4.12 無消抖按鍵電路及波形
“抖動”的脈沖寬度一般有幾十到幾百微秒,但也可能達到毫秒級,這對運行速度很快的數字電路會產生很大的影響。如果將發生“抖動”現象的按鍵連接到計數電路的時鐘輸入端,則檢測到每按一次鍵都會產生一串極不穩定的脈沖。
對實際的產品來說,按鍵在長時間的使用中永不產生“抖動”是不可能的,但只要預防可能產生的“抖動”即可。抖動其實只持續了一小段時間,軟件延時就是在按鍵產生“抖動”的這段時間里,用“拖延時間”的方法避開,從而消除因“抖動”而產生的錯誤信號,其示意圖詳見圖 4.13。在按下鍵的瞬間啟動定時器開始延時,延時 td 時間后再判斷按鍵是否仍然按下,若仍按下則本次按鍵有效,否則本次按鍵無效。延時消抖由于過程比較復雜,比較適合用軟件實現,因此稱為軟件消抖。
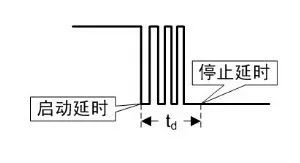
圖 4.13 延時消抖
2. 電路原理
一般來說,在用法上按鍵可分為獨立按鍵和矩陣鍵盤兩大類。LPC824 的 P0_10、P0_11是標準的開漏結構,無內部上拉電阻,因此連接按鍵時必須加上拉電阻。其它的 14 個 GPIO口均有可編程使能的內部上拉電阻,雖然 MCU 內部有幾十 KΩ以上的上拉電阻,但均屬于弱上拉,所以在實際的應用中,一般都會外接一個阻值適中的上拉電阻,以提高可靠性。
對于獨立按鍵來說,要求比較簡單,既不考慮多個鍵同時按下,也不考慮長按的情況。僅識別是否有鍵按下的情況,即有鍵按下一次執行一次操作。如圖 4.14 所示是一個獨立按鍵電路圖,只要將 AM824-Core的 J14_1 與 J14_2 短接,則 KEY 鍵接入 PIO0_1。
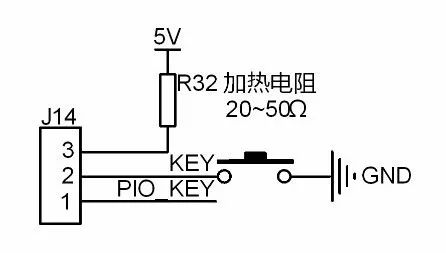
圖 4.14 獨立按鍵電路圖
由于一次按鍵的時間通常都是上百毫秒,相對于 MCU 來說是很長的,因此不需要時時刻刻不斷地檢測按鍵,只需要每隔一定的時間(如 10ms)檢測 GPIO 的電平即可。其檢測方法如下(1 表示高電平、0 表示低電平):
(1)當無鍵按下時,由于 PIO0_1 內部自帶弱上拉電阻,因此 PIO0_1 為 1;
(2)當 KEY 按下時,則 PIO0_1 為 0。在下一次掃描(延時 10ms 去抖動)后,如果PIO0_1 為 1,說明錯誤觸發;如果 PIO0_1 還是 0,說明確實有鍵按下,執行相應的操作;
(3)當 KEY 釋放時,則 PIO0_1 為 1,在下一次掃描(延時 10ms 去抖動)后,如果PIO0_1 為 0,說明錯誤觸發;如果 PIO0_1 還是 1,說明按鍵已經釋放,執行相應的操作。
3. Key 軟件包
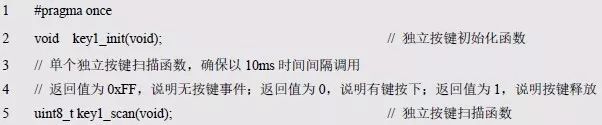
AMetal 提供了獨立按鍵初始化和按鍵掃描函數接口(key1.h),詳見程序清單 4.35。
程序清單 4.35 key1.h 接口
如程序清單 4.36 所示為獨立按鍵的范例程序,如果有鍵按下,則蜂鳴器“嘀”一聲;當按鍵釋放后,則 LED0 翻轉。
程序清單 4.36 獨立按鍵范例程序
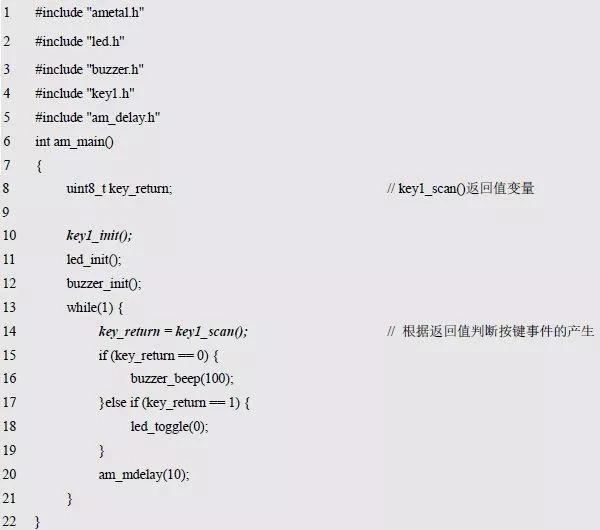
顯然,每隔 10ms 調用一次 key1_scan(),即可根據 key_return 的值判斷按鍵事件的產生,但這又是“每隔一段時間做某事”。如果使用軟件定時器定時自動掃描,則無需在 while(1)中每隔 10ms 調用一次 key1_scan(),詳見程序清單 4.37。
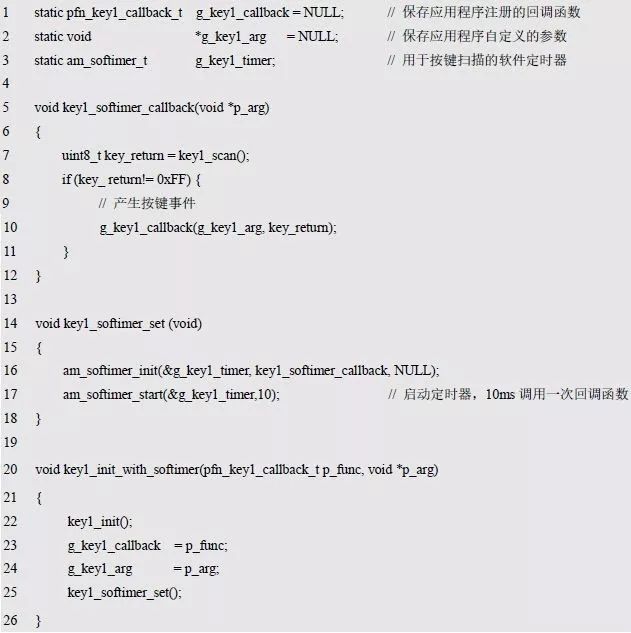
程序清單 4.37 添加軟件定時器后的按鍵范例程序
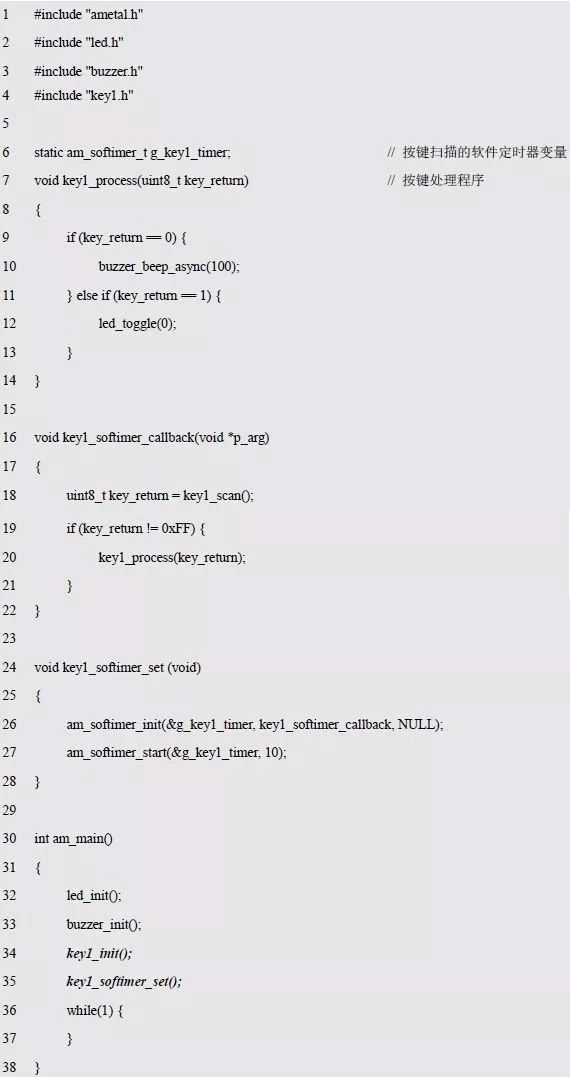
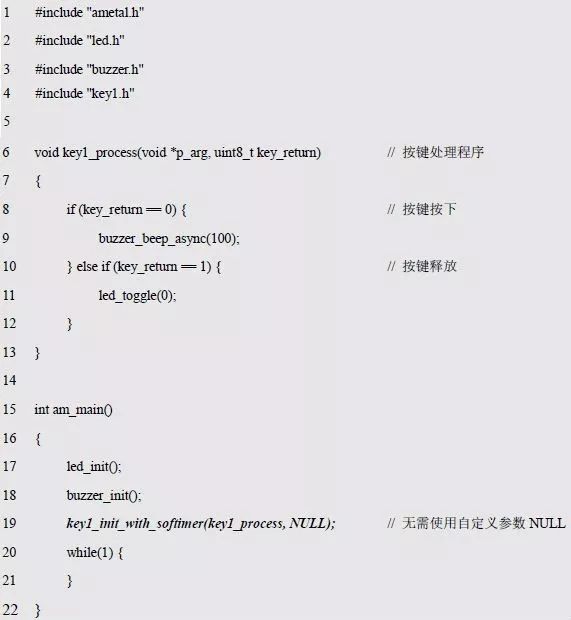
程序中新增了一個初始化軟件定時器 key1_softimer_set(),并啟動軟件定時器以 10ms的時間間隔,通過 key1_softimer_callback()回調 key1_scan()實現按鍵掃描。當按鍵事件發生(返回值不為 0xFF)時,則調用 key1_process()按鍵處理程序,根據掃描得到的返回值判斷按鍵事件的發生。在 key1_process()按鍵處理程序中,當有鍵按下時,蜂鳴器“嘀”一聲;當按鍵釋放時,LED0 翻轉。由于 key1_process()是在中斷環境的回調函數中調用的,因此不能出現阻塞式語句,必須調用異步模式下的 buzzer_beep_async()。
在這里,與軟件定時器相關的代碼直接放在主程序中,而在實際使用時,更希望將實現和聲明分別放在 key1.c 和 key1.h 中,因此需要增加一個接口函數:

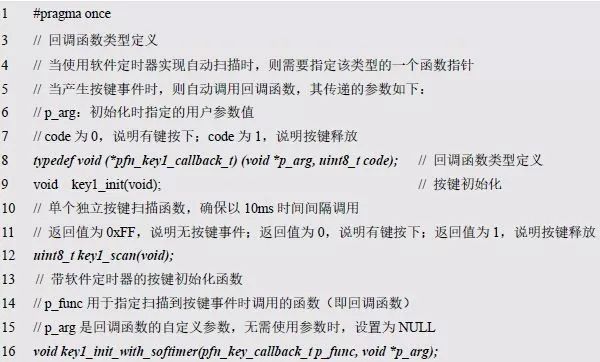
雖然按鍵與數碼管都可以使用軟件定時器實現自動掃描,但它們之間卻存在一定的差異,數碼管只要自動掃描即可,但對于按鍵自動掃描,當掃描到按鍵事件發生時,還必須通知應用程序做相應的處理。而實際上在封裝模塊時,并不知道應用程序要做什么事,唯一的辦法是采用注冊回調機制。當按鍵事件發生時,調用相應的注冊函數。如果需要使用軟件定時器,則在初始化時注冊一個函數,以便按鍵事件發生時調用。定義回調函數類型為:

重新定義帶軟件定時器的初始化函數類型為:

為了便于使用,將上述函數聲明和回調函數類型定義添加到程序清單 4.38 所示的 key1.h中,其相關實現代碼添加到程序清單 4.39 所示的 key1.c 中。
程序清單 4.38 key1.h 文件內容
程序清單 4.39 新增使用軟件定時器自動掃描的程序(key1.c)
當有鍵按下時,則蜂鳴器“嘀”一聲;當按鍵釋放時,則 LED0 翻轉,經過迭代后的代碼詳見程序清單 4.40。
程序清單 4.40 使用軟件定時器自動進行按鍵掃描范例程序
>>> 4.5.2 矩陣鍵盤
獨立按鍵必須占用一個 I/O 口,當按鍵數目較多時,這種每個按鍵占用一個口的方法就顯得很浪費了。如何用盡可能少的 I/O 口去管理較多的按鍵呢?矩陣形式鍵盤電路就是使用最多的一種,如圖 4.15 所示就是一種典型的矩陣式 2×2 鍵盤電路。采用矩陣鍵盤方式進行排列,其中 KR0、KR1 為行線,KL0、KL1 為列線。
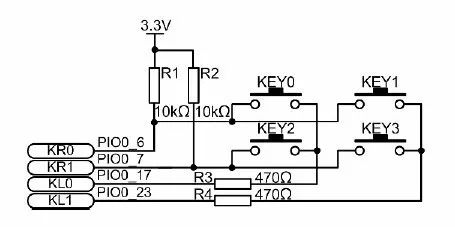
圖 4.15 2×2 矩陣鍵盤
該接法將口線分成行線(row)和列線(column),如果將它變成比較容易理解的拓撲結構,就是兩組垂直交叉的平行線,每個交叉點就是一個按鍵位置,按鍵的兩端分別接在行線和列線上。其最大優點是組合靈活,假如有16 個 I/O 可用于擴展做鍵盤電路,我們可以將它接成 6×10、5×11 或 8×8 等多種接法,當然,使用效率最高的是 8×8 的接法,它最多可實現 64 個按鍵。
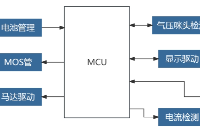
MiniPort-Key 按鍵模塊集成了 4 個按鍵,通過 MiniPort B(排母)與 AM824-Core 相連,同時引出其余不用的 I/O,實現模塊的橫向堆疊,其對應 AM824-Core 的 MiniPort 接口的 J4的功能定義詳見圖 4.16。
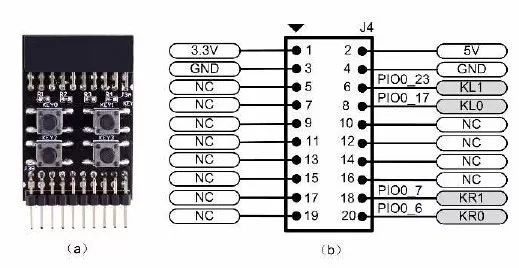
圖 4.16 按鍵模塊實物與接口定義圖
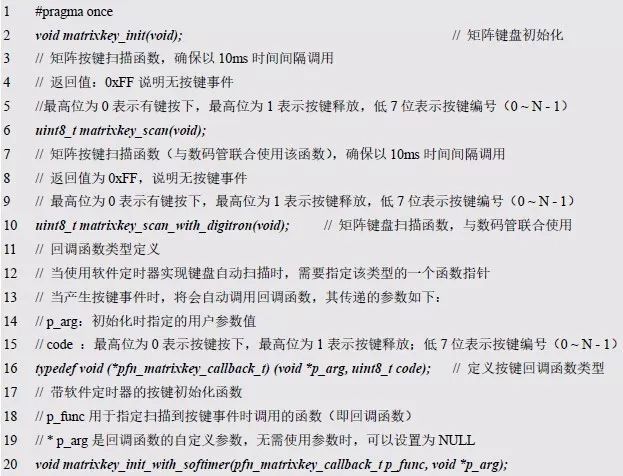
2×2 的矩陣鍵盤共有 4 個按鍵,分別為 KEY0~KEY3。KR0、KR1 為行線(row),KL0、KL1 為列線(column)。假設選擇 KL0、KL1 為輸入,當無鍵按下時,由于內部弱上拉作用,此時讀取電平為高電平。當 KEY0 按下時,KL1 依然為高電平,而 KL0 在 KR0 輸出低電平時就會得到低電平。顯然,只有 KR0、KR1 輸出為低電平時,KL0、KL1 才能得到低電平,這就是逐行掃描鍵盤的方法,即行線為輸出,列線為輸入,每次掃描一行,掃描該行時,對應行線輸出為低電平,其余行線輸出為高電平,然后讀取所有列線的電平,若有列線讀到低電平,則表明該行與讀到低電平的列對應的交叉點有按鍵按下。逐列掃描法恰好相反,其列線為輸出,行線為輸入,但基本原理還是一樣的。AMetal 針對矩陣鍵盤提供了相應的 matrixkey.h 接口,詳見程序清單 4.41。
程序清單 4.41 matrixkey.h 接口
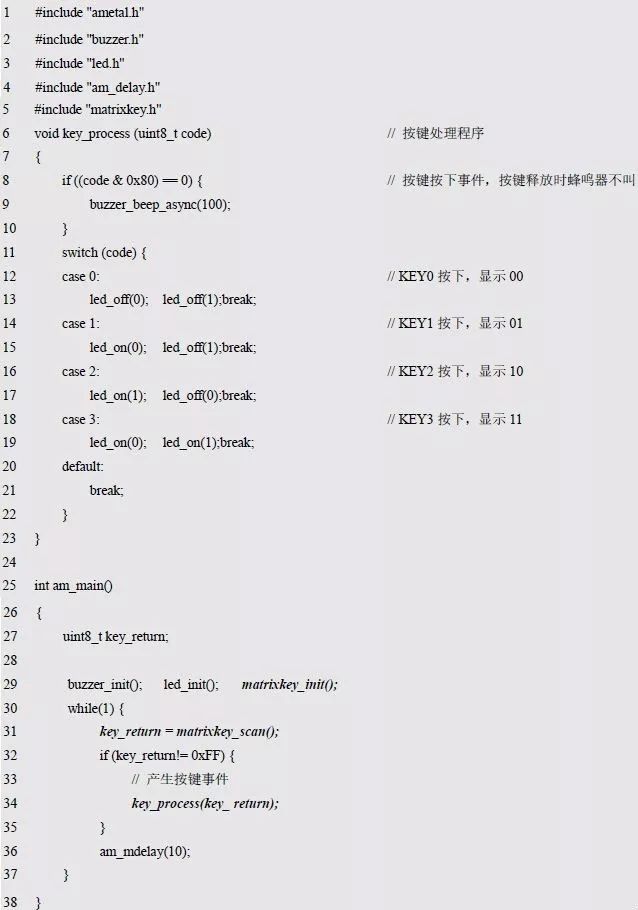
如程序清單4.42所示是使用上述接口的范例程序,即當有鍵按下時,蜂鳴器在發出“嘀”的一聲的同時,通過 LED0 和 LED1 的組合顯示按鍵編號。比如,KEY0 鍵按下時,兩個 LED燈均熄滅。KEY1 按下時顯示 01,即 LED0 亮,LED1 熄滅,依此類推。
程序清單 4.42 矩陣鍵盤范例程序
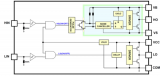
為了節省引腳,還可以將數碼管與矩陣鍵盤結合起來使用,如圖4.17 所示的數碼管的 2個 com 端與矩陣鍵盤的列線是復用的,PIO0_17與 PIO0_23 既是數碼管的 com0、com1,又是矩陣鍵盤的列線 KL0、KL1這樣設計反而節省了引腳。作為鍵盤掃描時需將列線配置為輸入,作為數碼管掃描時需將 com 端設置為輸出。

圖 4.17 LED 顯示器電路圖
為了不影響數碼管的顯示,在鍵盤掃描結束后,必須將管腳恢復為輸出狀態。這是由

函數實現的。鍵盤掃描只需要每隔 10ms 進行一次,而數碼管掃描需要每隔 5ms 進行一次,當它們同時使用時,可以在按鍵掃描的 10ms 內進行 2 次數碼管掃描。
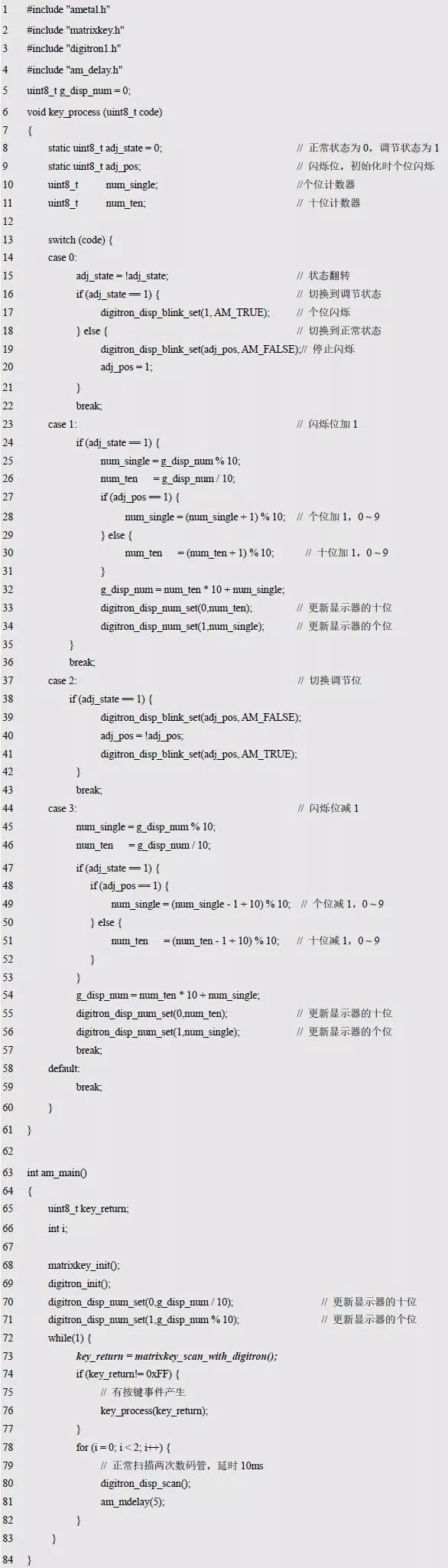
利用 4 個按鍵和數碼管,實現一個按鍵調節值的小應用,各個按鍵的功能定義如下:
-
KEY0:進入設置狀態。點擊后進入設置狀態,默認個位不斷閃爍,再次點擊后回到正常運行狀態;
-
KEY2:切換當前調節的位。當進入設置狀態后,當前調節的位會不斷地閃爍。點擊該鍵可以切換當前調節的位,由個位切換到十位,或由十位切換到個位;
-
KEY1:也稱為+1 鍵,將當前正在閃爍的位的值加 1;
-
KEY3:也稱為-1 鍵,將當前正在閃爍的位的值減 1。
其相應的范例程序詳見程序清單 4.43。
程序清單 4.43 矩陣鍵盤+數碼管范例程序(2)
-
定時器
+關注
關注
23文章
3251瀏覽量
115021 -
周立功
+關注
關注
38文章
130瀏覽量
37679
原文標題:周立功:面向接口的編程——事件驅動和鍵盤管理
文章出處:【微信號:ZLG_zhiyuan,微信公眾號:ZLG致遠電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
太陽能藍牙鍵盤專用 微光微能量收集芯片-MF9006

高壓柵極驅動器的功率損耗分析

筆記本電腦鍵盤亂碼
深度分析智慧樓宇管理平臺
磁軸鍵盤霍爾開關MST-MH481霍爾磁軸機械鍵盤

什么是磁軸鍵盤?電競磁軸鍵盤高精度線性霍爾傳感器方案簡析

芯海科技MCU驅動的平板電腦皮套鍵盤一體化方案

無線鍵盤CCC認證:強制性還是自愿性?

鍵盤熱插拔和非熱插拔的區別
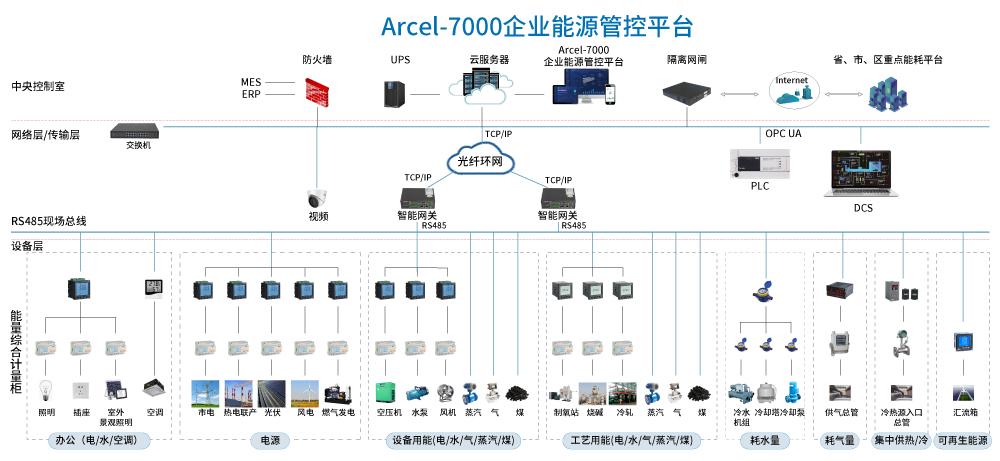
企業節能管理系統 能耗分析系統





 工商網監
工商網監
評論