") 什么是電動汽車的操縱穩(wěn)定性_如何評價電動汽車的操縱穩(wěn)定性的好壞
什么是電動汽車的操縱穩(wěn)定性_如何評價電動汽車的操縱穩(wěn)定性的好壞
一、什么是電動汽車的操縱穩(wěn)定性?
電動汽車操縱穩(wěn)定性是指電動汽車在行駛過程中,能抵抗各種外界干擾、遵循駕駛人給定行駛方向穩(wěn)定行駛的能力。電動汽車操縱穩(wěn)定性包括操縱性和穩(wěn)定性。電動汽車操縱性是指電動汽車能夠確切地響應駕駛人轉向指令的能力;而電動汽車穩(wěn)定性是指電動汽車抵抗外界干擾而保持穩(wěn)定行駛的能力,或電動汽車受到外界擾動后恢復原來運動狀態(tài)的能力。良好的操縱穩(wěn)定性是保證電動汽車安全行駛的基礎。對于電動汽車來說,操縱穩(wěn)定性是其高速行駛的生命線。
二、如何評價電動汽車的操縱穩(wěn)定性的好壞?
電動汽車側向穩(wěn)定性是指電動汽車抵抗側翻和側滑的能力。電動汽車高速轉彎行駛的離心力較大,電動汽車往往沿離心力所指的側向翻車和滑移。因此,側向穩(wěn)定性評價可以在電動汽車轉彎行駛時進行。評價時,轎車以中高速度通過彎道,觀察轎車是否有漂移或側滑,車身是否保持平穩(wěn)。正常時,轎車應能按照預定的彎道行駛,且車身側傾不太嚴重。
在國外,有的國家對汽車的抗側翻能力,規(guī)定了檢驗的高標準和低要求。高標準是指在平坦的水泥或瀝青路面的場地上,以任意的行駛速度和轉向組合操縱,都不得翻車。低要求是指在平坦堅實的場地上,以50km/h和80km/h的車速行駛,以500°/s的角速度把轉向盤轉過1 80 0,不得翻車;在平坦的水泥或瀝青路面的場地上,成一直線布置1 1根標桿,間距為30m,汽車以72km/h的車速繞桿行駛,不得翻車。
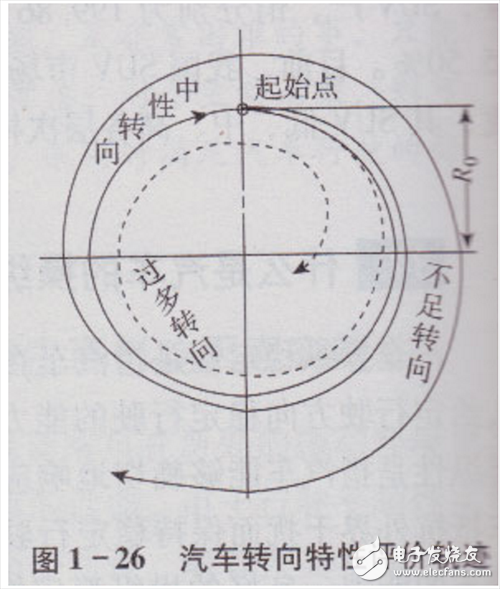
三、轉向特性評價
汽車穩(wěn)態(tài)轉向特性有三種,即中性轉向、不足轉向和過多轉向。唯有不足轉向特性汽車的操縱穩(wěn)定性較好,而且人們已習慣于駕愛具有不足轉向特性的汽車,故現(xiàn)代汽車都設計成具有不足轉向特性。但在汽車使用過程中,某些因素變化如前后輪胎氣壓變化、轎車質心位置變化等會改變電動轎車的轉向特性,使其向中性轉向或過多轉向特性變化,從而導致汽車的操縱穩(wěn)定性變差。因此,使用中應確保汽車具有不足轉向特性。汽車轉向特性評價的測定方法如下。
1.在平坦的堅硬廣場上畫出半徑為15m的圓道印跡。
2.將汽車轉向盤轉動適當角度,使汽車以最低穩(wěn)定車速沿半徑15m的圓道印跡作等速圓周行駛,并保持轉向盤轉角不變。
3.逐漸踩下加速踏板,采用逐級加速法或連續(xù)加速法提高車速,使汽車作較高車速的圓周行駛。
4.根據(jù)汽車加速行駛后車輪的行駛軌跡定性判斷汽車的穩(wěn)態(tài)轉向特性,如圖1-26所示。若汽車轉向半徑不變,則汽車具有中性轉向特性;若汽車轉向半徑變大,則汽車具有不足轉向特性;若汽車轉向半徑變小,則汽車具有過多轉向特性。
-
電動汽車
+關注
關注
156文章
12094瀏覽量
231323 -
操縱穩(wěn)定性
+關注
關注
0文章
2瀏覽量
5785
發(fā)布評論請先 登錄
相關推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論