 第三篇-V1.5 TB6612電機pwm控制STM32智能小車 STM32F103C8T6單片機
第三篇-V1.5 TB6612電機pwm控制STM32智能小車 STM32F103C8T6單片機
功能介紹放開頭, 使用便捷無需愁。
這是全網最詳細、性價比最高的STM32實戰項目入門教程,通過合理的硬件設計和詳細的視頻筆記介紹,硬件使用STM32F103主控資料多方便學習,通過3萬字筆記、12多個小時視頻、20多章節代碼手把手教會你如何開發和調試。讓你更快掌握嵌入式系統開發。
V1.5.0-STM32智能小車
V1.5.0:庫函數開發。功能:循跡、避障、跟隨、遙控、電池電壓顯示等。
視頻合集鏈接推薦觀看
[https://www.bilibili.com/video/BV1SY411L7rJ/?spm_id_from=333.337.search-card.all.click]
**V3.3.0-STM32智能小車 **
V3:HAL庫開發、功能:PID速度控制、PID循跡、PID跟隨、遙控、避障、PID角度控制、視覺控制、電磁循跡、RTOS等功能。
視頻合集鏈接推薦觀看
[https://www.bilibili.com/video/BV16x4y1M7EN/?spm_id_from=333.337.search-card.all.click]
系統軟件設計
點亮小燈
查看原理圖
查閱原理圖,小燈接在PC13上下面驅動PC13
編寫驅動

思考題:如果同時驅動PC13與PC14,應該如何編寫?(答案:應該增加下圖代碼)
LED_Init()函數的代碼
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE); //使能PB,PC端口時鐘
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; //PC13
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度為50MHz
GPIO_Init(GPIOC, &GPIO_InitStructure); //根據設定參數初始化
GPIOC.13
GPIO_SetBits(GPIOC,GPIO_Pin_13); //PC.13輸出高
}
LED.h 部分宏定義
#define LED PCout(13)// PC13
?
測試
編譯下載(如果沒有運行,需要按復位 運行)
電機驅動
由TB6612介紹得,通過控制AO和AO2高低電平可以控制AIN1和AIN2輸出。
GPIO 高低電平控制AIN和BIN
- 查閱原理圖AIN1、AIN2、BIN1、BIN2依次接在單片機的PB13、PB12、PB1、PB0
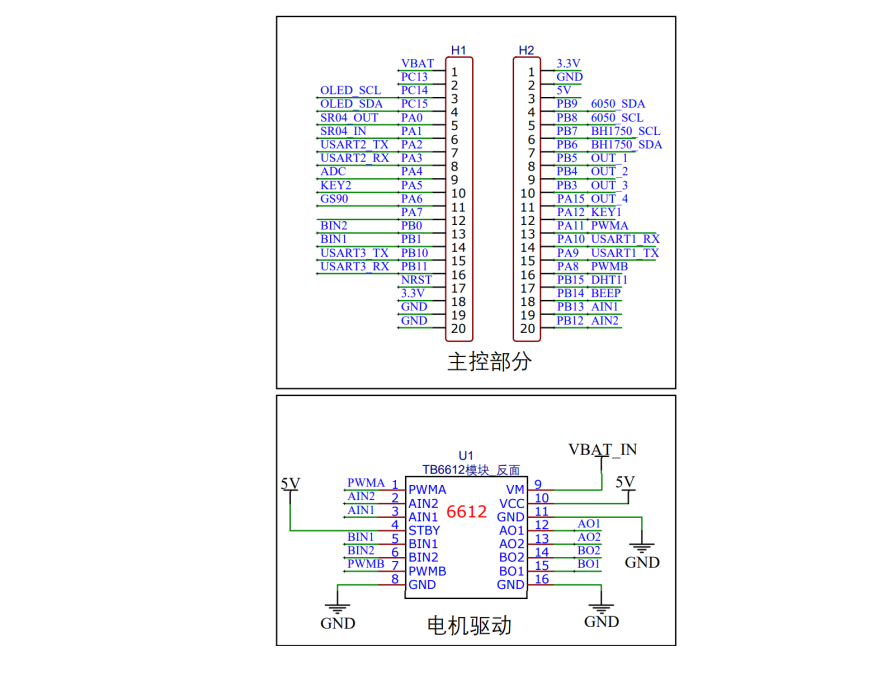
- 原理同GPIO輸出高低電平見第二節
TB6612 GPIO驅動函數代碼
//驅動6612 的AIN1 AIN2 BIN1 BIN2
// AIN1 PB13
// AIN2 PB12
// BIN1 PB1
// BIN2 PB0
void TB6612_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口時鐘
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_13
|GPIO_Pin_12|GPIO_Pin_0|GPIO_Pin_1; //PB0 OB1 PB12 PB13端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度為50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根據設定參數初始化
GPIO_SetBits(GPIOB,GPIO_Pin_13 |GPIO_Pin_12|GPIO_Pin_0|GPIO_Pin_1);
//PB0 OB1 PB12 PB1 輸出高
}
相關宏定義
#define AIN1 PBout(13)// PB13
#define AIN2 PBout(12)// PB12
#define BIN1 PBout(1)// PB1
#define BIN2 PBout(0)// PB0
PWM控制PWMA和PWMB
將 PWM輸出實驗 的 timer 文件移植到我們前面點燈的工程中,更改驅動文件
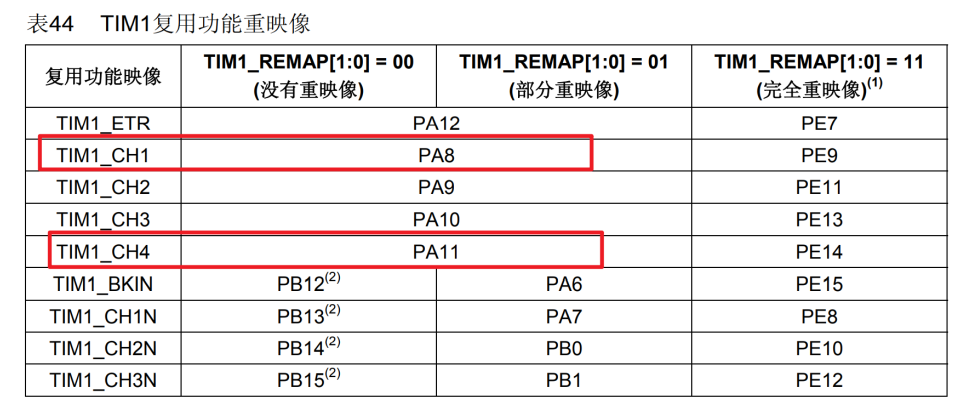
- 查看原理圖 PWMA 和PWMB依次連接PA11和PA8
- 查看 參考手冊 關于定時器復用功能重映射的介紹(中文參考手冊第119頁)
- 初始化外設
配置對應引腳功能
初始化TIM1
初始化TIM1 相應通道的 PWM模式
使能
注意輸出使能 高級定時器必須使用:TIM_CtrlPWMOutputs(TIM_TypeDef TIMx, *
FunctionalState NewState);
//TIM1 PWM部分初始化
//PWM輸出初始化
//arr:自動重裝值
//psc:時鐘預分頻數
void TIM1_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
//使能對應定時器
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //使能定時器1時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO,
ENABLE); //使能GPIO外設和AFIO復用功能模塊時鐘
//GPIO_PinRemapConfig(GPIO_PartialRemap_TIM1, ENABLE); //Timer3部分重映射
TIM3_CH2- >PB5
//配置對應引腳功能
//設置該引腳為復用輸出功能,輸出TIM1 CH1 和CH4
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_11; //TIM_CH1 TIM_CH4
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //復用推挽輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
//初始化TIM1
TIM_TimeBaseStructure.TIM_Period = arr; //設置在下一個更新事件裝入活動的自動重
裝載寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //設置用來作為TIMx時鐘頻率除數的預
分頻值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //設置時鐘分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上計數
模式
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根據
TIM_TimeBaseInitStruct中指定的參數初始化TIMx的時間基數單位
//初始化TIM1 Channel1 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //選擇定時器模式:TIM脈沖寬
度調制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比較輸出使
能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //輸出極性:TIM輸
出比較極性高
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根據T指定的參數初始化外設TIM3
OC2
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM3在CCR2上的預裝
載寄存器
//初始化TIM1 Channel4 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //選擇定時器模式:TIM脈沖寬
度調制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比較輸出使
能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //輸出極性:TIM輸
出比較極性高
TIM_OC4Init(TIM1, &TIM_OCInitStructure); //根據T指定的參數初始化外設TIM3
OC2
TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM3在CCR2上的預裝
載寄存器
TIM_Cmd(TIM1, ENABLE); //使能TIM1
TIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主輸出使能,高級定時器必須開啟這
個
}
調用初始化函數、改變占空比。
TIM1_PWM_Init(1999,359);
//TIM1掛在APB2為72M ,故計算 72 000 000 /(359+1)/(1999+1) = 100 Hz,
//故設置了頻率為100 Hz、自動重裝載值 1999
TIM_SetCompare1(TIM1,100); //設置 TIM1 通道1 捕獲/比較寄存器值 為 1000 可以
計算出占空比
//PA8 PWMB
TIM_SetCompare4(TIM1,1900); //設置
//PA11 PWMA
?
通過軟件仿真
邏輯分析儀觀察波形輸出、顯示PWM波形
設置好仿真環境
打開邏輯分析儀

添加要觀察的引腳
跳到設置對應程序位置,打開仿真
打開實時更新選項
調節觀察分析儀
產生的如圖方波就是一種PWM波

那么在程序哪里設置的這些參數那
時鐘預分頻數 決定了PWM 頻率和周期
TIM1_PWM_Init(1999,359);
//TIM1掛在APB2為72M ,故計算 72 000 000 /(359+1)/(1999+1) = 100 Hz,
那么誰調節占空比那?
- 非常好理解、定時器的計數器向上計數就是越來越大。
- PWM 模式我們可以看手冊
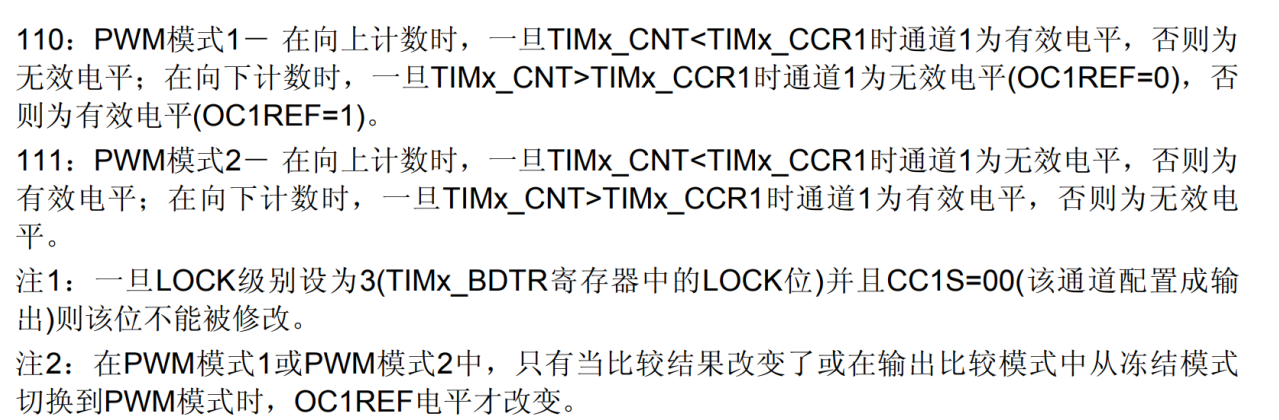
3.這里的TIM_OCPolarity_High 就是把有效電平設置為高
舉個栗子:如果我們設置上面的示例參數,工作過程應該是怎么的吶?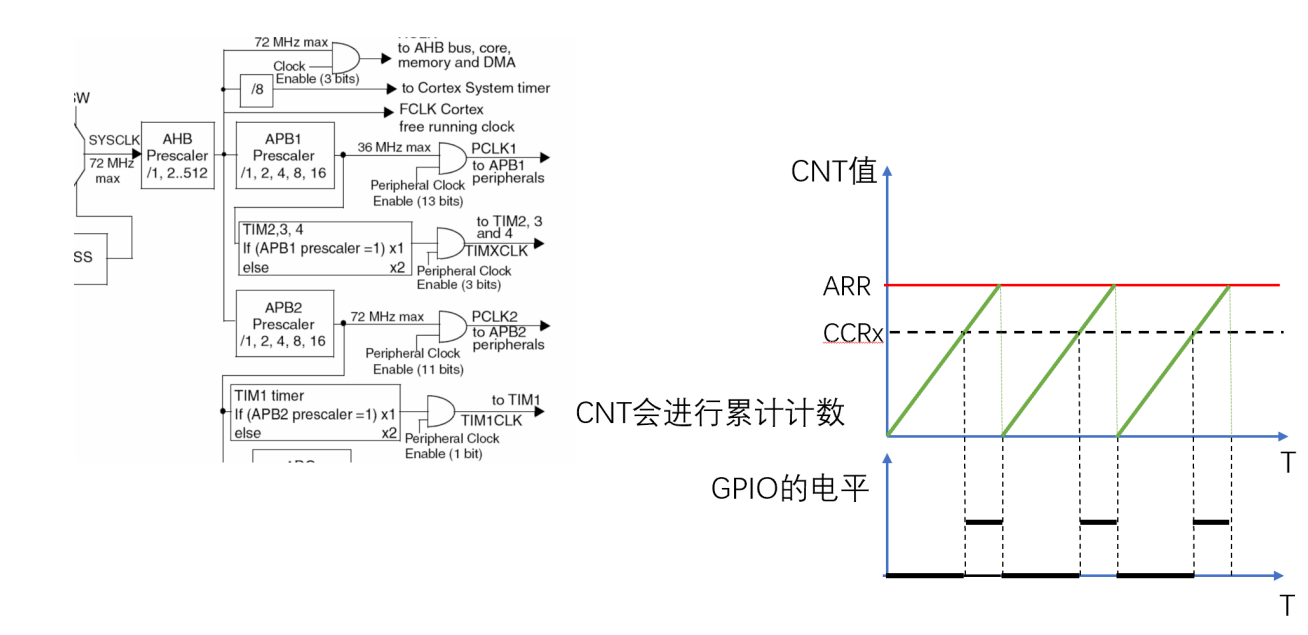
電機控制通過AIN1、AIN2、BIN1、BIN2控制電機正反轉,通過PWMA、PWMB控制電機轉速
AIN1 = 1;
AIN2 = 0;
BIN1 = 1;
BIN2 = 0;
TIM_SetCompare4(TIM1,1500); //設置 A
TIM_SetCompare1(TIM1,1500); //設置B
?
讓小車跑一跑吧
小車電機線正確接法
錯誤接法
小車直行
void Forward(void)
{
AIN1 = 1;
AIN2 = 0;
BIN1 = 1;
BIN2 = 0;
TIM_SetCompare4(TIM1,1500); //設置 A
TIM_SetCompare1(TIM1,1500); //設置B
}
小車后退
void Backward(void)
{
AIN1 = 0;
AIN2 = 1;
BIN1 = 0;
BIN2 = 1;
TIM_SetCompare4(TIM1,1500); //設置 A
TIM_SetCompare1(TIM1,1500); //設置B
}
小車左轉
void Leftward(void)
{
AIN1 = 0;
AIN2 = 1;
BIN1 = 1;
BIN2 = 0;
TIM_SetCompare4(TIM1,1500); //設置 A
TIM_SetCompare1(TIM1,1500); //設置B
}
小車右轉
void Rightward(void)
{
AIN1 = 1;
AIN2 = 0;
BIN1 = 0;
BIN2 = 1;
TIM_SetCompare4(TIM1,1500); //設置 A
TIM_SetCompare1(TIM1,1500); //設置B
}
審核編輯 黃宇
-
電機
+關注
關注
142文章
9023瀏覽量
145546 -
PWM控制
+關注
關注
7文章
194瀏覽量
26296 -
智能小車
+關注
關注
87文章
549瀏覽量
81754 -
STM32F103C8T6
+關注
關注
108文章
160瀏覽量
83598 -
TB6612
+關注
關注
1文章
16瀏覽量
2328
發布評論請先 登錄
相關推薦
基于STM32F103C8T6和TB6612FNG的平衡小車是如何制作的
基于STM32的雙輪平衡小車設計
TB6612驅動相關資料推薦
采用STM32F103C8T6單片機制作兩輪平衡小車控制系統的資料分享
stm32f103c8t6封裝及最小系統原理圖
STM32F103C8T6核心板的資料合集免費下載

stm32f103c8t6單片機驅動臺達伺服電機

使用STM32F103C8T6控制L298N電機驅動麥克納姆輪小車(HAL庫)
第七章-V1.5 STM32超聲波測距STM32F103C8t6超聲波避障小車 超聲波避障模塊 STM32超聲波測距






 工商網監
工商網監
評論