 揭秘車載VCU項目之外掛界的“大哥”DMA
揭秘車載VCU項目之外掛界的“大哥”DMA
引腳配置
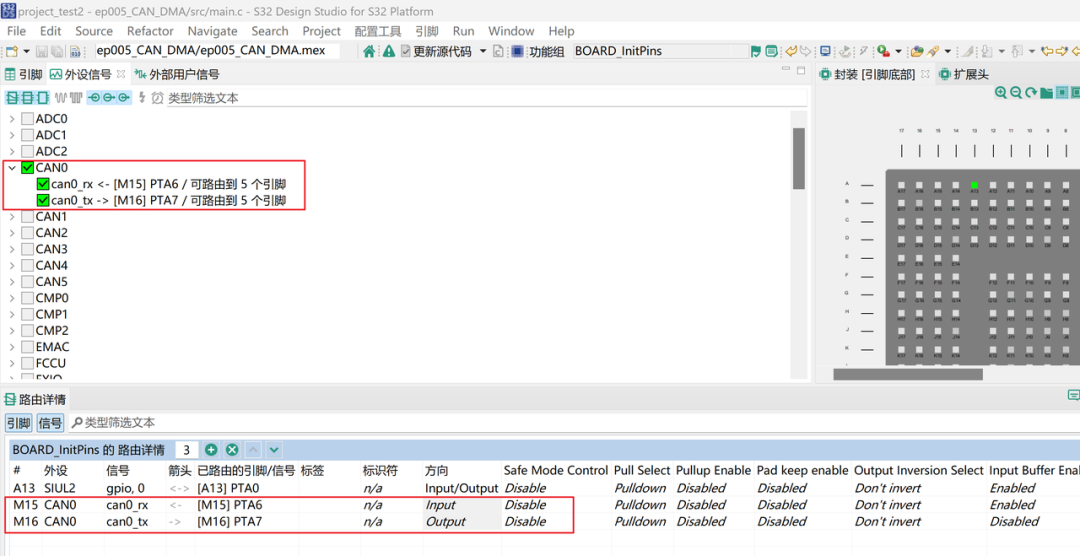
此實例選擇CAN0進行配置。
三、外設配置
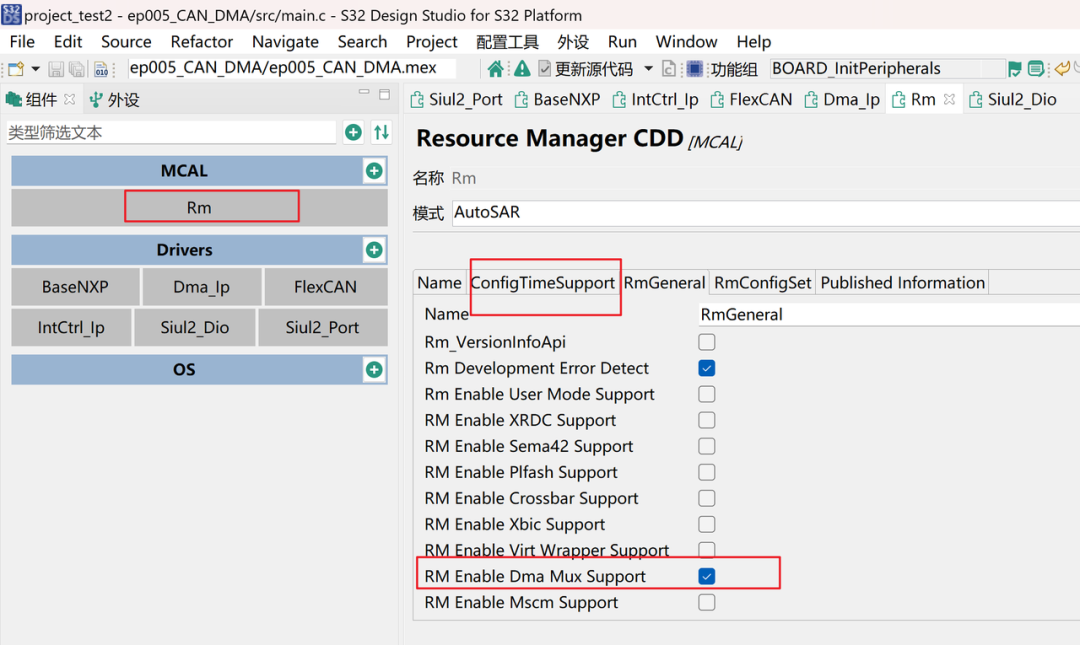
對于DMA,其采用的固定映射,對于通道0至通道15,其映射一部分外設,通道16至通道31映射一部分外設,所以對于外設要使用DMA,也需要注意此項。添加外設: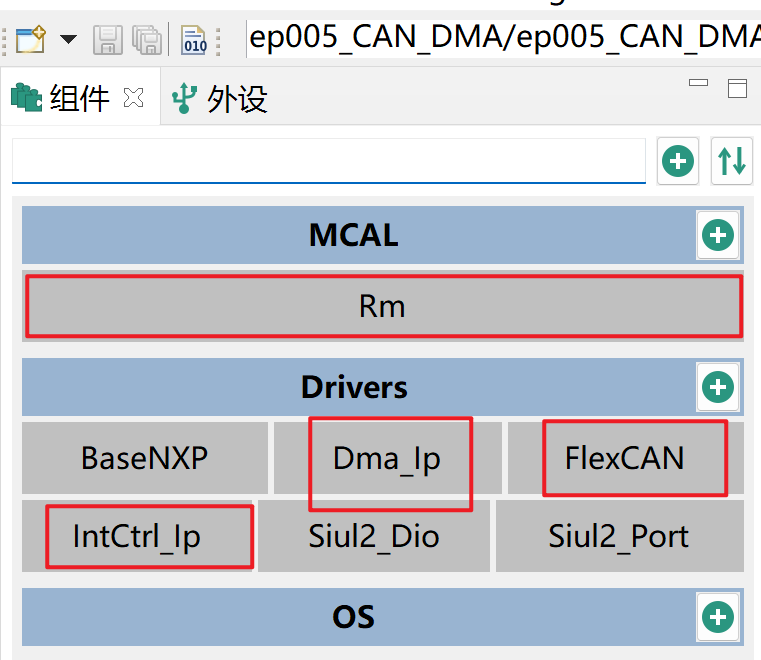
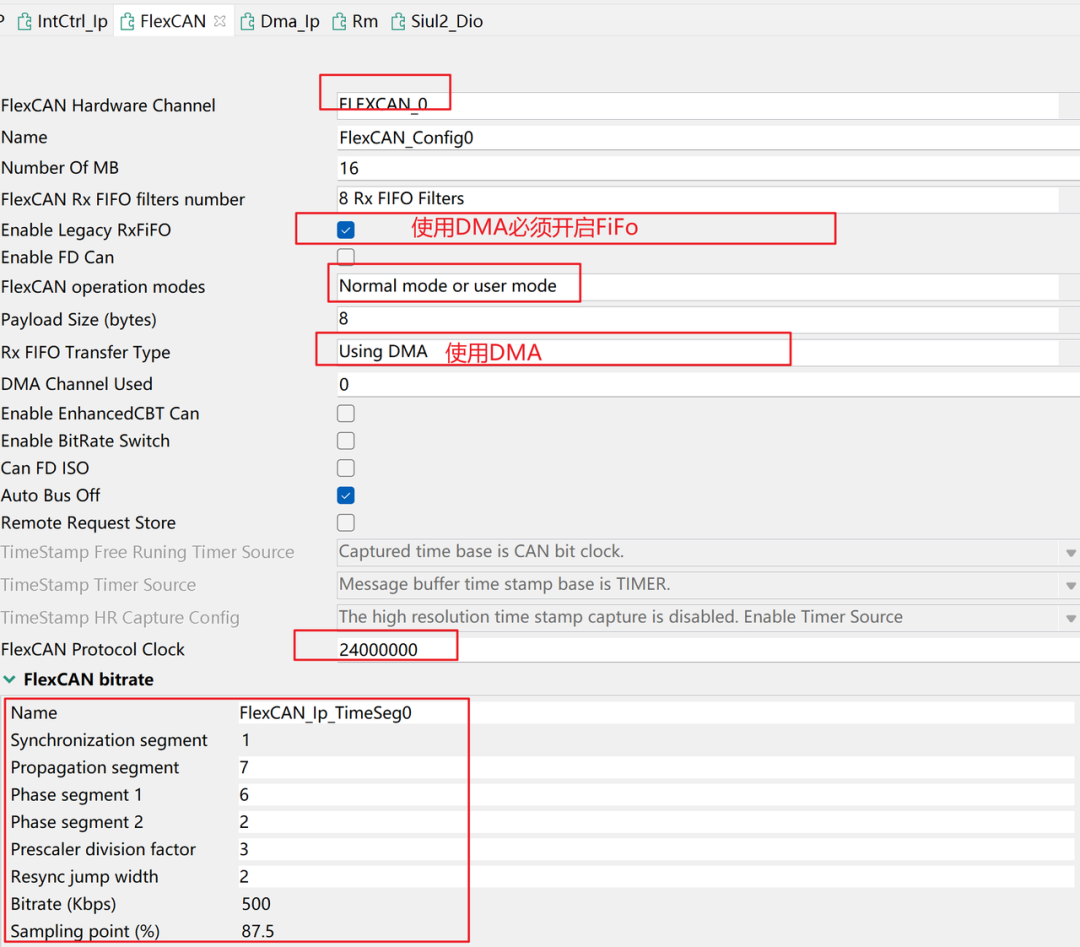
CAN基礎配置:
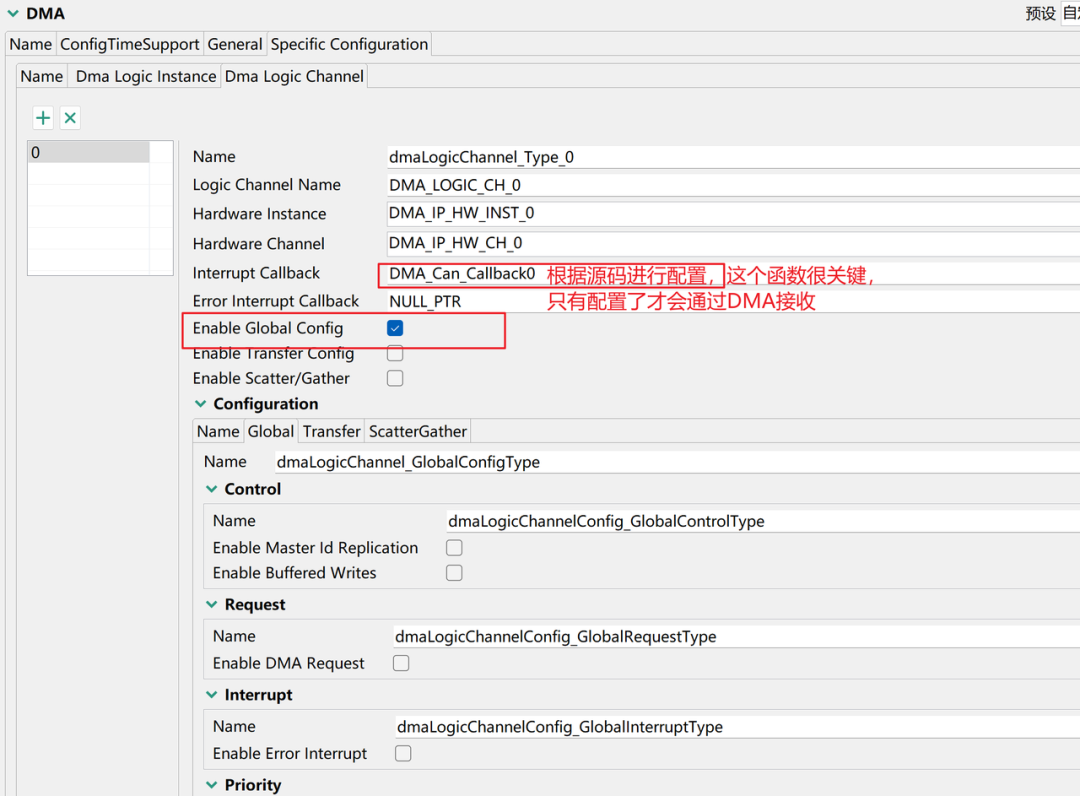
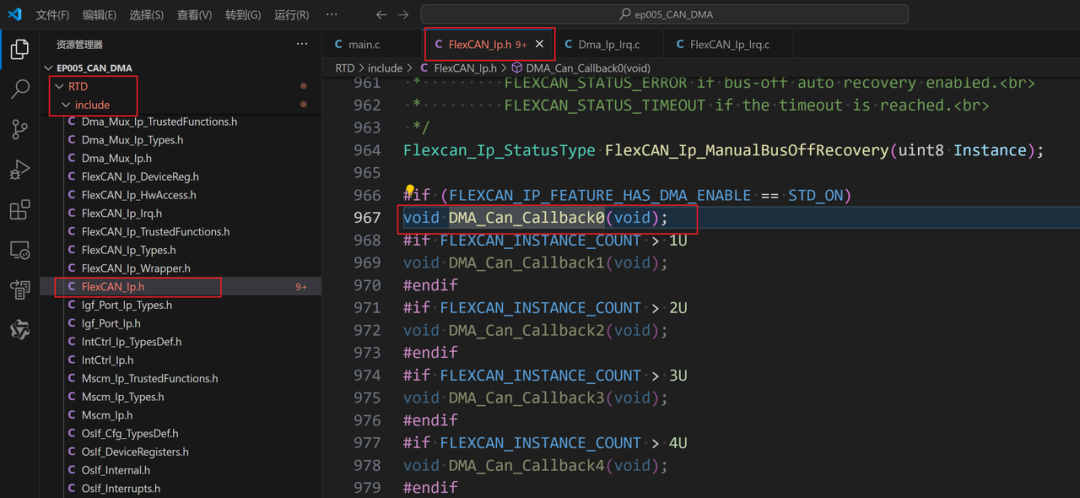
CAN的用戶回調配置:
中斷配置: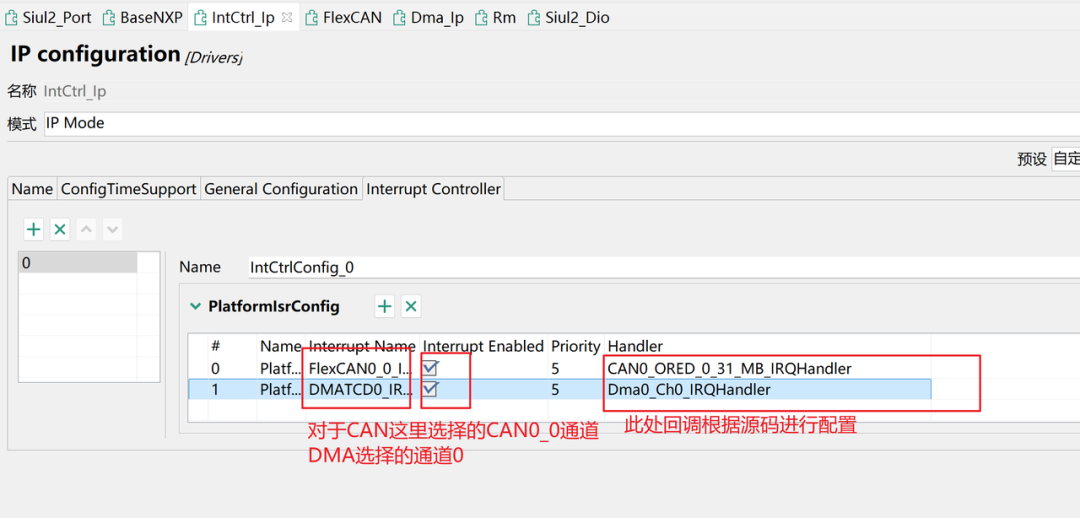
配置完畢后更新代碼:

四、部分代碼展示

/** * @brief FlexCAN0中斷回調函數 * * 該函數處理FlexCAN0模塊的各類事件,根據事件類型執行相應的處理邏輯。 * 主要負責接收和發送CAN消息。 * * @param instance CAN實例號,此處固定為FlexCAN0。 * @param eventType 事件類型,指示當前中斷的原因。 * @param buffIdx 接收緩沖區索引,指示接收消息所在的緩沖區。 * @param flexcanState FlexCAN狀態結構體指針,包含FlexCAN模塊的當前狀態信息。 */void FlexCAN0_Callback(uint8 instance, Flexcan_Ip_EventType eventType, uint32 buffIdx, const Flexcan_Ip_StateType *flexcanState){ /* 忽略參數,防止編譯器警告 */ (void)flexcanState; (void)instance; (void)buffIdx;
/* 根據事件類型執行相應的處理邏輯 */ switch(eventType) { case FLEXCAN_EVENT_RX_COMPLETE: { txData[7] = 0; /* 設置消息ID類型為標準ID,準備發送消息 */ tx_info.msg_id_type = FLEXCAN_MSG_ID_STD; /* 發送消息,并從接收緩沖區讀取新消息 */ FlexCAN_Ip_Send(INST_FLEXCAN_0, TX_MB_IDX, &tx_info, MSG_ID, (uint8 *)&txData); FlexCAN_Ip_Receive(INST_FLEXCAN_0, RX_MB_IDX, &rxData, FALSE); }break; case FLEXCAN_EVENT_RXFIFO_COMPLETE: { /* RXFIFO完成事件的處理邏輯 */ }break; case FLEXCAN_EVENT_TX_COMPLETE: { /* TX完成事件的處理邏輯 */ }break; case FLEXCAN_EVENT_ENHANCED_RXFIFO_COMPLETE: { /* 增強型RXFIFO完成事件的處理邏輯 */ }break; case FLEXCAN_EVENT_ENHANCED_RXFIFO_WATERMARK: { /* 增強型RXFIFO水位標記事件的處理邏輯 */ }break; case FLEXCAN_EVENT_DMA_COMPLETE: { txData[7] = 11; /* DMA完成事件的處理邏輯,發送消息并從FIFO讀取數據 */ tx_info.msg_id_type = FLEXCAN_MSG_ID_STD; FlexCAN_Ip_Send(INST_FLEXCAN_0, TX_MB_IDX, &tx_info, MSG_ID, (uint8 *)&txData); FlexCAN_Ip_RxFifo(INST_FLEXCAN_0, &rxFifoData); }break; default: { /* 默認情況下,不做任何處理 */ }break; }}
五、注意事項
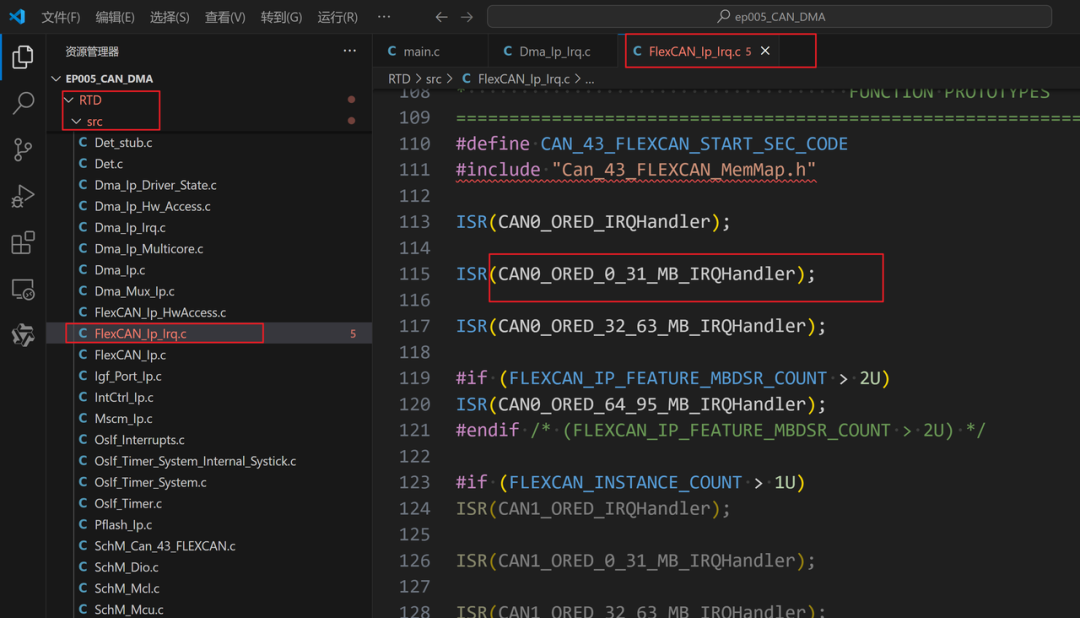
中斷配置回調函數注意事項:
-
車載
+關注
關注
17文章
612瀏覽量
83377 -
dma
+關注
關注
3文章
560瀏覽量
100546 -
VCU
+關注
關注
17文章
80瀏覽量
20545
發布評論請先 登錄
相關推薦
如何在我的項目中設置DMA功能?
整車控制器VCU EOL 測試系統
無法在VCU108上運行MIG測試該怎么辦?
如何獲取和添加vcu118板信息到工具?
VCU 108超大規模virtex 7評估板未在vivado_hls板中列出
【HarmonyOS HiSpark AI Camera】智能車載終端
整車VCU技術和開發流程剖析VCU
VCU(整車控制器)簡介
VCU信號的類型和VCU信號的應用

如何解決PWM使用的DMA通道與串口接收的DMA通道撞車問題

PWM使用的DMA通道與串口接收的DMA通道撞車了,咋辦?

Google通過自研VCU芯片讓視頻更流程
從0到1實現VCU:新能源汽車整車控制器






 工商網監
工商網監
評論