") 機(jī)器視覺運(yùn)動控制一體機(jī)在SCARA機(jī)械手柔性上下料的應(yīng)用
機(jī)器視覺運(yùn)動控制一體機(jī)在SCARA機(jī)械手柔性上下料的應(yīng)用

市場應(yīng)用背景
SCARA機(jī)械手柔性上下料系統(tǒng)在3C電子、半導(dǎo)體、鋰電、光伏、食品及醫(yī)療等領(lǐng)域受益于自動化需求的持續(xù)增長。該系統(tǒng)提高生產(chǎn)效率和精度,降低運(yùn)營成本,具有良好的尺寸和材質(zhì)適應(yīng)性,能快速完成物料轉(zhuǎn)換,優(yōu)化生產(chǎn)流程,因此推動其在這些領(lǐng)域中被廣泛應(yīng)用。

傳統(tǒng)自動上下料的局限性:
靈活度不高:采用碗式振動盤通常針對特定產(chǎn)品,對尺寸、形狀變化適應(yīng)性差,易卡料。
速度和效率限制:在需要高速生產(chǎn)的場景中,易受機(jī)械設(shè)計、視覺處理與運(yùn)動控制數(shù)據(jù)交互的速度、效率等問題限制,無法滿足生產(chǎn)線的高產(chǎn)量或快速換料生產(chǎn)的需求。
系統(tǒng)集成復(fù)雜:涉及如機(jī)器人、視覺系統(tǒng)、控制系統(tǒng)、供料系統(tǒng)等多種組件,設(shè)備間協(xié)議和數(shù)據(jù)格式可能存在差異導(dǎo)致兼容性等問題,增長調(diào)試周期。
數(shù)據(jù)流通性差:舊系統(tǒng)可能存在不支持實時數(shù)據(jù)處理或遠(yuǎn)程監(jiān)控,形成信息孤島,限制了企業(yè)智能制造的實施,無法與MES系統(tǒng)無縫集成。
高成本問題:需要購買多套硬件,同時市場用人和維護(hù)成本居高不下,增加企業(yè)運(yùn)營成本。
正運(yùn)動技術(shù)解決方案:
正運(yùn)動針對市場需求,特此開發(fā)了基于VPLC系列的視覺運(yùn)動控制一體機(jī)和RTFuse快組態(tài)軟件的SCARA機(jī)械手柔性上下料解決方案,通過點(diǎn)位示教與RTFuse快組態(tài)的結(jié)合,實現(xiàn)一站式、快速開發(fā)上下料設(shè)備,有效縮短項目周期,降低運(yùn)維與人力成本,提升企業(yè)營收及生產(chǎn)線自動化水平。
方案可靈活適應(yīng)各種尺寸規(guī)格和材質(zhì)的物料。操作員通過簡單調(diào)整視覺、運(yùn)動控制功能模塊參數(shù),即可在最短時間內(nèi)完成物料轉(zhuǎn)換,實現(xiàn)高速高精的機(jī)械手柔性上下料,有效消除卡料的問題,顯著提高數(shù)據(jù)處理速度,簡化生產(chǎn)流程,減少人工干預(yù)。
適用于開發(fā)擺盤機(jī)、貼合機(jī)、食品醫(yī)療包裝、裝配及分揀等多種需要柔性供料的場景。
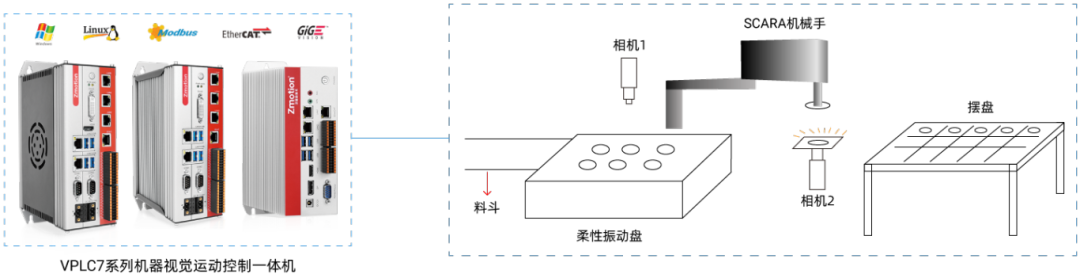
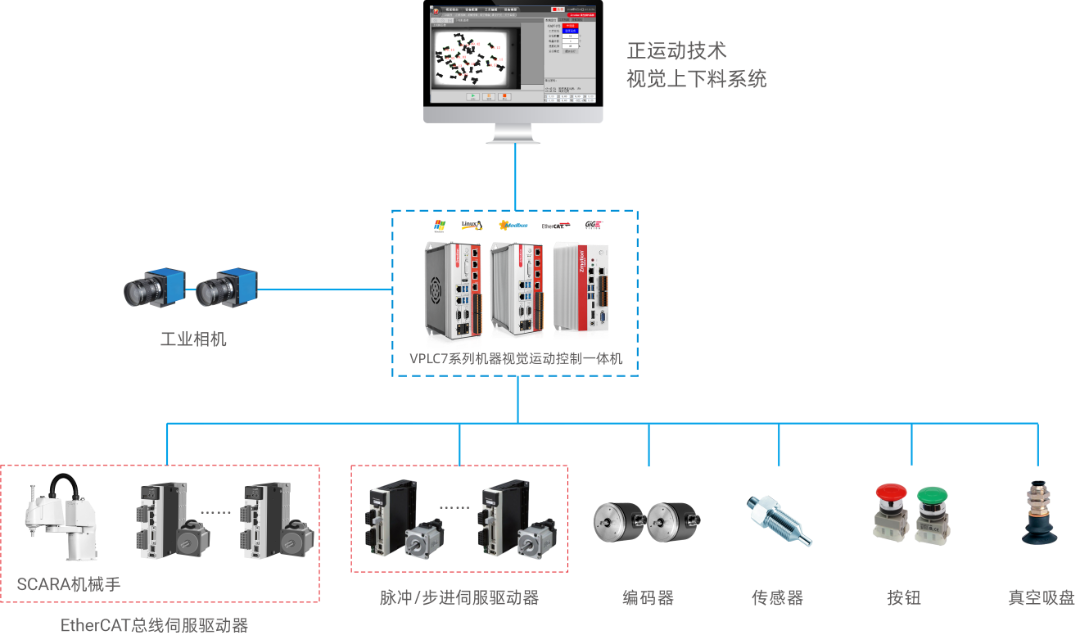
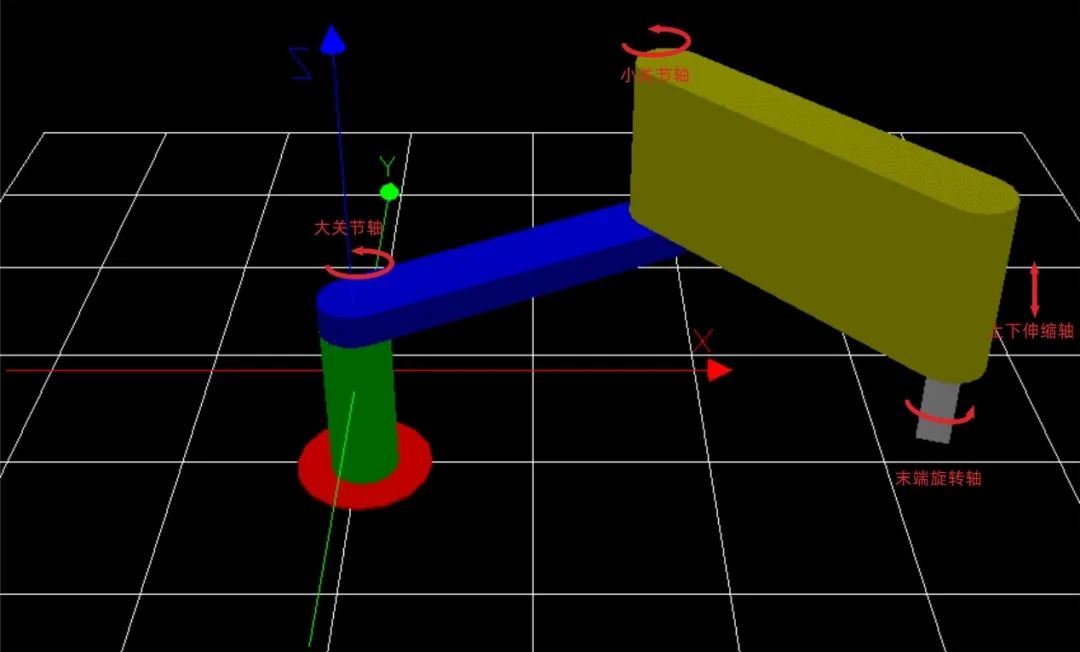
01 機(jī)器視覺運(yùn)動控制一體機(jī)在SCARA機(jī)械手柔性上下料的解決方案
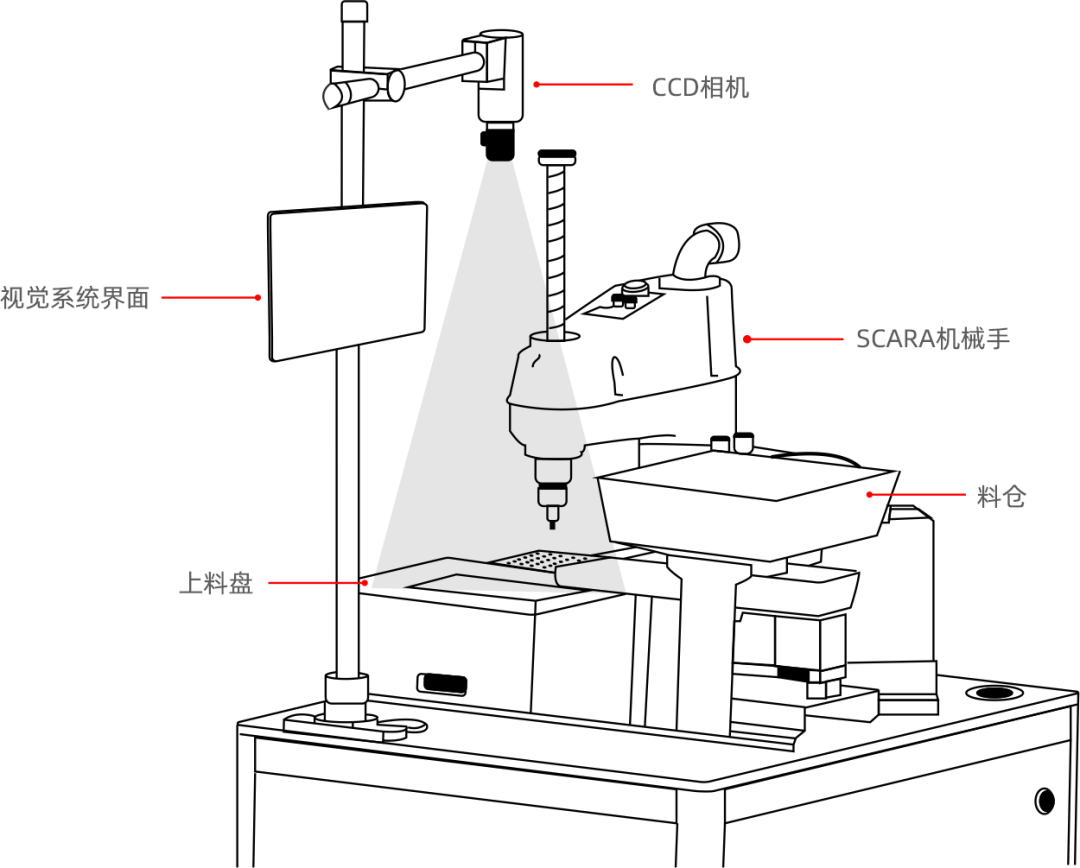
 SCARA機(jī)械手柔性上下料加工示意圖
SCARA機(jī)械手柔性上下料加工示意圖
正運(yùn)動SCARA機(jī)械手柔性上下料解決方案設(shè)計
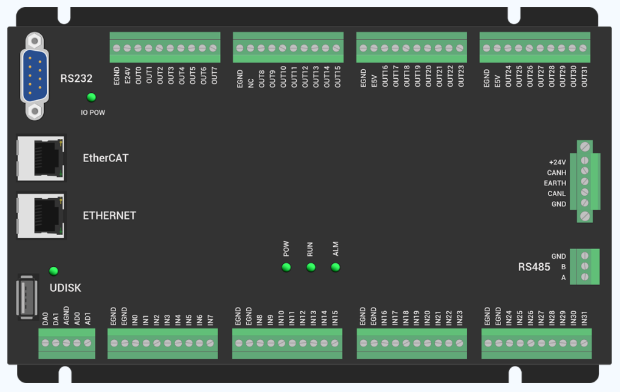
20DI:接原點(diǎn)、限位等傳感器,以及開關(guān)信號、編碼器等
20DO:高速輸出口接工業(yè)相機(jī)的硬觸發(fā)輸入和點(diǎn)膠閥
EtherCAT接口:接EtherCAT總線驅(qū)動器,控制其它軸運(yùn)動
4路單端脈沖輸出:接脈沖驅(qū)動器,控制傳送帶
EtherNET接口:千兆網(wǎng)口,接支持Gige協(xié)議的面陣相機(jī),實現(xiàn)視覺定位、檢測應(yīng)用
與柔性振動盤通訊
正運(yùn)動SCARA機(jī)械手柔性上下料解決方案支持多種柔性振動盤通訊協(xié)議。
振動盤本體上配備有網(wǎng)口、RS232/485接口和I/O信號接口,支持Modbus-TCP和Modbus-RTU通訊。
在此次方案中采用的柔性振動盤I/O信號觸發(fā)來通訊操作。操作員可根據(jù)廠家的提供的調(diào)參軟件,可調(diào)試柔性振動盤達(dá)到理想的震動效果。
1、運(yùn)動控制與機(jī)器視覺實現(xiàn)過程
(1)運(yùn)動控制
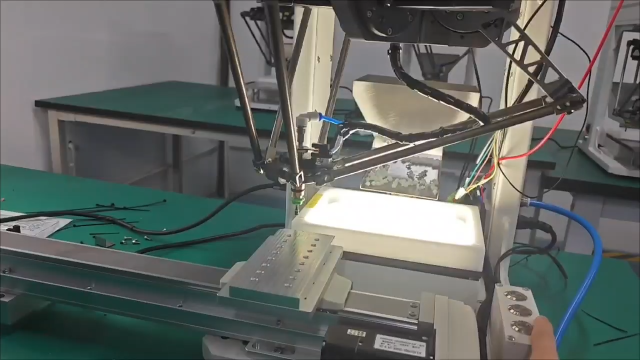
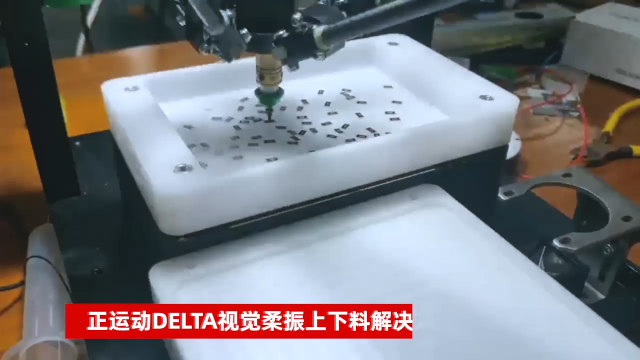
首先通過I/O觸發(fā)振動盤快速振動,使物料在物料盤內(nèi)均勻分布。上相機(jī)完成物料的拍攝和處理后,SCARA機(jī)械手根據(jù)視覺處理數(shù)據(jù)沿預(yù)設(shè)路徑移動,實現(xiàn)精確的點(diǎn)到點(diǎn)運(yùn)動控制。機(jī)械手依次執(zhí)行以下操作:物料抓取、二次拍攝和下料。在整個過程中,控制系統(tǒng)實時調(diào)整機(jī)械手各關(guān)節(jié)速度,以實現(xiàn)更平滑的運(yùn)動軌跡。
(2)機(jī)器視覺
在SCARA機(jī)械手執(zhí)行柔性上下料的過程中,機(jī)器視覺系統(tǒng)首先通過形狀匹配工具對料盤上的多個物料進(jìn)行粗定位,然后通過坐標(biāo)系數(shù)校準(zhǔn),將物料的世界坐標(biāo)輸送給機(jī)械手進(jìn)行抓取。隨后物料依次被移至下相機(jī)拍照位進(jìn)行視覺飛拍,進(jìn)行二次定位實現(xiàn)位置糾偏,便于SCARA機(jī)械手到達(dá)下料區(qū)完成精準(zhǔn)位置下料,提高定位精度滿足客戶需求。

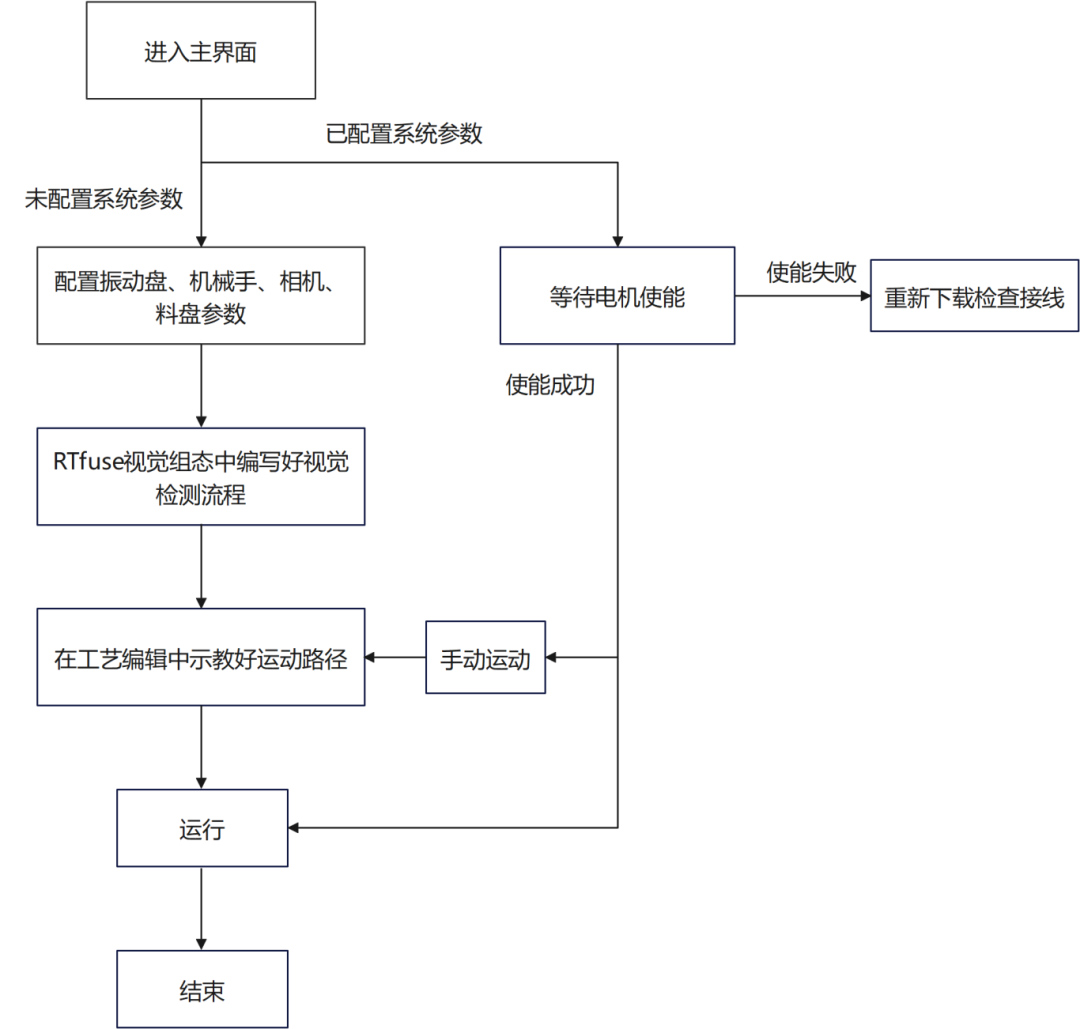
2、SCARA機(jī)械手柔性上下料配置流程
3、方案核心應(yīng)用優(yōu)勢
高度集成:集成豐富的IO控制、30+機(jī)器人算法、機(jī)器視覺和運(yùn)動控制、通訊等功能模塊,可靈活構(gòu)建運(yùn)動控制+視覺一體化的機(jī)械手柔振上下料解決方案
調(diào)試方便、交付快:工程師無需編程,通過工具調(diào)參即可快速開發(fā),縮短項目周期與提高數(shù)據(jù)處理速度,以及快速評估新項目潛在風(fēng)險,效率更高
提高系統(tǒng)靈活度:可快速換線/料,無需復(fù)雜的機(jī)械拆裝過程,可以輕松重新配置參數(shù)以適應(yīng)生產(chǎn)計劃變化,適用于各種小型零部件零散排列上料
精度高:通過視覺系統(tǒng)識別物料位置,無需固定治具來指定物料來料方向,能準(zhǔn)確定位振動盤物料位置
減少人工和運(yùn)維成本:減少了對人工操作的需求,一人即可操作多臺設(shè)備,解決工程人員流失,減少人為失誤、返工、維修等費(fèi)用,以及時間成本
4、解決方案硬件配置
| 產(chǎn)品類型 | 產(chǎn)品型號 | 廠家 | 數(shù)量 |
| 機(jī)器視覺運(yùn)動控制一體機(jī) | VPLC7系列 | 正運(yùn)動 | 1 |
| 運(yùn)動控制實時內(nèi)核 | MotionRT7 | 正運(yùn)動 | 1 |
| 圖像采集系統(tǒng) | - | - | 2 |
|
EtherCAT驅(qū)動器 |
- | - | 4 |
| 柔性振動盤 | - | - | 1 |
| SCARA機(jī)械手本體 | - | - | 1 |
| 其他配置 | - | - | - |
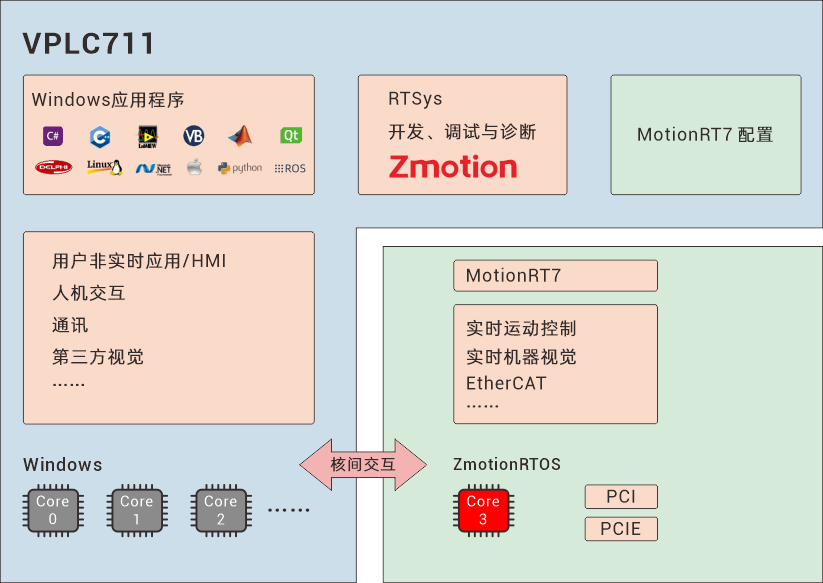
02 VPLC7系列機(jī)器視覺運(yùn)動控制一體機(jī)
VPLC711是一款基于x86平臺和Windows操作系統(tǒng)的高性能機(jī)器視覺EtherCAT運(yùn)動控制器,可脫機(jī)運(yùn)行,支持豐富的IO控制,30+機(jī)器人算法,以及視覺和運(yùn)動控制功能,大幅簡化視覺與運(yùn)動控制項目的配置流程。
VPLC系列機(jī)器視覺運(yùn)動控制一體機(jī)的安裝與拆卸過程便捷,占地空間小,還能與其它控制單元部件(如伺服驅(qū)動器、傳感器、編碼器、控制閥等)和MES系統(tǒng)無縫集成,提供一個完整端到端的視覺運(yùn)動控制解決方案。

可選6-64軸運(yùn)動控制(脈沖+EtherCAT總線)
內(nèi)置實時內(nèi)核MotionRT7,支持第三方視覺軟件
板載20路通用輸入(其中10路為高速輸入),20路高速輸出
提供一體化開放式IPC形態(tài)的實時軟控制器/軟PLC集成的視覺+運(yùn)動控制解決方案
多核并行運(yùn)算,能夠高效處理運(yùn)動控制,機(jī)器視覺等自動化設(shè)備核心任務(wù)
03 RTFuse柔振上下料系統(tǒng)

正運(yùn)動技術(shù)的RTFuse柔振上下料系統(tǒng)專為“視覺+運(yùn)動控制”的柔振上下料應(yīng)用設(shè)計,提供一站式解決方案。該軟件簡化了參數(shù)設(shè)置,搭配圖像采集系統(tǒng),可以大幅縮短開發(fā)周期,降低開發(fā)成本。
▌相機(jī)支持
支持市面上大部分主流相機(jī),支持4個相機(jī)并行采集、視覺飛拍。
▌快速配置
機(jī)械手、軸組、振動盤、相機(jī)和矩陣料盤、工具參數(shù)。
▌示教功能
提供取料、飛拍及放料路徑等多個點(diǎn)位的一鍵示教功能。
▌坐標(biāo)校準(zhǔn)
支持相機(jī)標(biāo)定,包括修改XY坐標(biāo)方向和世界坐標(biāo)位置補(bǔ)正。
▌走位標(biāo)定
通過示教好的運(yùn)動點(diǎn)位,一鍵即可完成自動標(biāo)定。
▌系統(tǒng)切換
可切換至RTfuse快組態(tài)系統(tǒng),實現(xiàn)視覺檢測流程。
▌可視化界面
界面友好,便于用戶數(shù)據(jù)監(jiān)控,實時顯示使能狀態(tài)、回原狀態(tài)、定位數(shù)量和擺放計數(shù)等。
▌支持機(jī)械手類型
4軸模組、SCARA機(jī)械手、Delta機(jī)械手、直角坐標(biāo)機(jī)械手、6關(guān)節(jié)等
審核編輯 黃宇
-
機(jī)器視覺
+關(guān)注
關(guān)注
162文章
4389瀏覽量
120460 -
一體機(jī)
+關(guān)注
關(guān)注
0文章
915瀏覽量
32754 -
運(yùn)動控制
+關(guān)注
關(guān)注
4文章
584瀏覽量
32908
發(fā)布評論請先 登錄
相關(guān)推薦
DELTA并聯(lián)機(jī)械手視覺方案榮獲2024年度機(jī)器人應(yīng)用典型案例獎 #正運(yùn)動技術(shù) #機(jī)器視覺運(yùn)動控制一體機(jī)
LabVIEW運(yùn)動控制(一):EtherCAT運(yùn)動控制器的SCARA機(jī)械手應(yīng)用



機(jī)器視覺運(yùn)動控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺上下料應(yīng)用

機(jī)器視覺運(yùn)動控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺上下料的應(yīng)用#機(jī)器視覺運(yùn)動控制一體機(jī)
EtherCAT運(yùn)動控制器在SCARA和碼垛機(jī)械手中的應(yīng)用
機(jī)器視覺運(yùn)動控制一體機(jī)VPLC532E在汽車膠帶纏繞的開放式CNC應(yīng)用

VPLC7機(jī)器視覺運(yùn)動控制一體機(jī)在三軸SCARA機(jī)械手螺絲鎖付的應(yīng)用

VPLC系列機(jī)器視覺運(yùn)動控制一體機(jī)在五軸聯(lián)動點(diǎn)膠上的應(yīng)用
EtherCAT運(yùn)動控制器Delta機(jī)械手應(yīng)用

機(jī)器視覺運(yùn)動控制一體機(jī)在喇叭跟隨點(diǎn)膠上的應(yīng)用
機(jī)器視覺運(yùn)動控制一體機(jī)在光伏匯流焊機(jī)器人系統(tǒng)的解決方案
五金板材上下料機(jī)械手






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論