 詳析備用電池單元微控制器的功能和操作
詳析備用電池單元微控制器的功能和操作
自行車功率計是一種測量健身自行車騎行者功率輸出(以瓦為單位)的儀器,此類功率計作為訓練輔助工具,可向騎行者提供有關其運動量的反饋信息。例如,騎行者可以設定在上坡期間保持至少200 W功率輸出的目標。如果功率低于此值,騎行者可以通過加快踩踏板速度或換至更高檔位來增加功率。功率通常顯示在自行車車把上安裝的主控單元上。功率計與計算和顯示功率的設備之間必須有無線連接。為了測量功率,有必要測量施加到自行車傳動系統某部分的機械應變。惠斯通電橋電路中連接的應變片可用于測量機械應變。惠斯通電橋產生的信號通常非常小,頻率非常低。因此,需要通過具有零漂移輸入失調電壓的高精度放大器將信號放大。此外,功率計始終由電池供電,因此功率計的總電流消耗必須盡可能低。
每個BBU模塊均采用一個微控制器和一個電池管理系統(BMS)微控制器。在ADI公司的參考設計中,超低功耗Arm微控制器MAX32690充當微控制器,負責執行六個重要進程(見圖1)。MAX32625微控制器充當參考設計的BMS微控制器。BMS微控制器負責與ADBMS6948芯片通信,并將所有測量數據傳遞給微控制器。
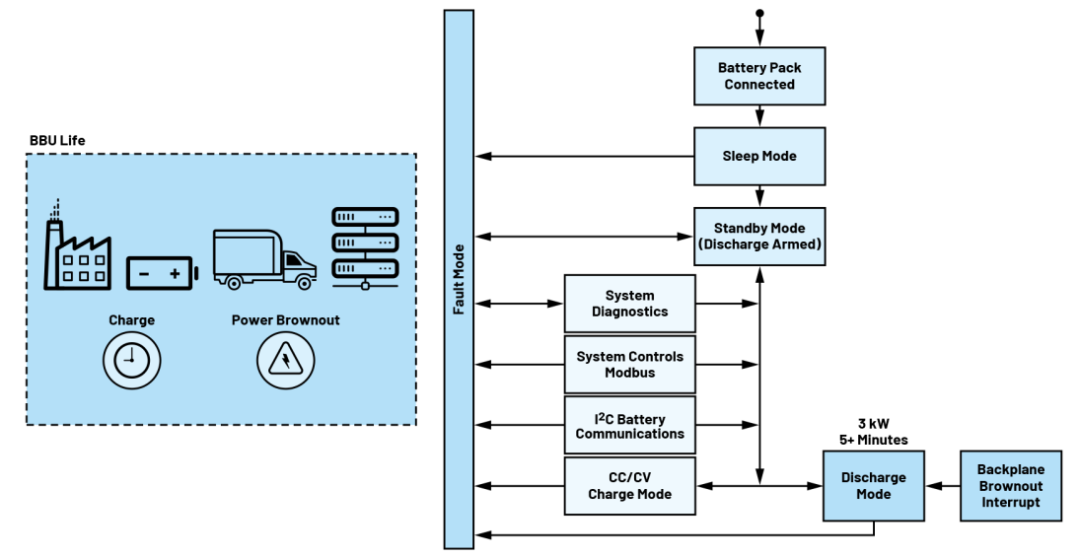
圖1.主控制器的管理操作周期1
微控制器的六個進程如下
執行管理任務和通過I2C協議與各種外設進行通信。
處理由背板電壓數據提供的放電序列。
選擇恒流模式或恒壓模式處理電池的充電工作。
轉變BBU模塊的充放電狀態。
故障處理和響應。
作為Modbus從機響應Modbus命令。
01微控制器進程
執行管理任務和通過I2C與各種外設通信
在眾多輔助器件連接到模塊電路的情況下,微控制器用作I2C主器件。核心微控制器收集并保存來自輔助器件的數據,同時充當I2C主器件。為了推進各種任務順利進行,微控制器還負責控制各種I2C輔助器件。多款I2C輔助器件示例如下:
BMS微控制器采用MAX32625。
LTC2971,雙通道電源系統管理器。
MAX31760,精密風扇速度控制器。
24AA512T/EEPROM,用作數據存儲器,可檢索和存儲重要數據。
LTC2991溫度傳感器。
BMS微控制器(MAX32625)
微控制器定期與BMS微控制器(MAX32625)通信,接收有關各個電池包的電芯電壓、充電狀態(SOC)、健康狀態(SOH)、電芯溫度以及電池包可能出現的任何故障的更新信息。更新每四分鐘進行一次,因為電芯電壓、SOC、SOH和溫度預計不會快速變化。如果發生任何故障,兩個微控制器之間的共享引腳將置為高電平,并觸發微控制器上的中斷,進而立即讀取BMS微控制器,獲取有關故障的信息。微控制器中有專用I2C端口,僅用于與BMS微控制器通信,以支持兩個微控制器之間快速通信。
LTC2971(電源管理IC)
微控制器時常通過電源管理總線(PMBUS)協議與LTC2971通信,檢查電壓、電流和溫度測量結果以及有無警告和故障。當測量背板輸出電壓參數時,LTC2971起到快速反饋作用,以便微控制器調整其例程。此外,該器件會調整電源變換器的反饋電壓,并允許其將輸出電壓下調1%,從而確保放電工作模式下輸出電壓處于調節范圍內。
MAX31760(風扇控制器)
MAX31760負責調節BBU模塊的風扇速度。脈沖寬度調制的占空比由微控制器配置,以通過I2C調節風扇的速度。微控制器根據溫度以及背板負載電流或電池包負載電流,計算并調整所需的風扇速度
24AA512TT(EEPROM?數據存儲)
板載EEPROM充當整個BBU模塊的外部存儲器件。微控制器通過I2C寫入閃存頁,定期將電池電壓水平、SOC、SOH、電芯類型和型號年份以及電路板溫度等重要信息保存到EEPROM中。該數據每小時更新一次,用戶可以在維護和故障排除期間訪問。
LTC2991(數字板載溫度監測)
LTC2991是一款八通道電壓、電流和溫度傳感器。該器件借助放置在電池模組內部重要位置的各種數字傳感器,監測電池模塊的溫度。根據溫度讀數,微控制器可以調節風扇速度,確保電源板和電池堆的工作溫度保持在適當水平,并且始終低于40°C。
02選擇恒流模式或恒壓模式處理電池的充電
微控制器還負責處理電池的充電模式。開始時,電芯的電壓容量非常低,微控制器允許以最大5A的電流為電芯充電。一旦電芯處于穩定狀態,微控制器就會將充電電流調整為2A,此時每個電芯的電壓尚未達到4V。利用來自BMS微控制器的數據持續監測電芯電壓,并使用模數轉換器外設測量整個電池層電壓,微控制器便可以判斷所有電芯是否都已達到4V,如達到4V,微控制器便會將充電模式切換為恒壓模式。這需要將充電電流限制為僅0.5A。微控制器將繼續監測整個電池層電壓水平,同時從BMS微控制器獲取數據,檢查所有電池是否充滿電。如圖2所示。
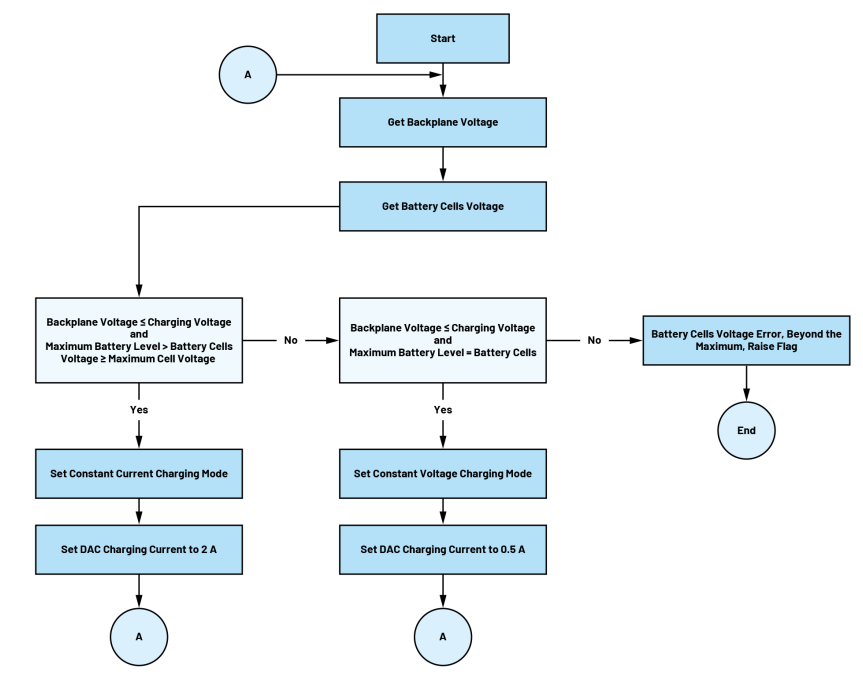
圖2.恒流和恒壓充電算法
03電源變換器充放電狀態的轉變
充分了解BBU在電源中斷期間如何從待機模式轉變到電池供電模式至關重要。為了防止任何意外斷電和數據丟失,模塊的微控制器密切監視背板電壓水平。LT8228的默認充電模式設置在49V至53V左右,但如果微控制器檢測到背板電壓在2ms內降至48.5V以下,則會立即將LT8228方向引腳從充電模式切換到放電模式,這種模式持續四分鐘以處理停電情況。這四分鐘里模塊將持續放電,以確保供電不間斷。如果電芯的條件允許且背板電壓供應仍未恢復,模塊將再等待一分鐘,以便電芯冷卻,然后再次進入放電模式。電源恢復后,BBU將切換回主電源,并開始為電池充電。有關如何操作和維護BBU的具體說明,請參考圖3了解此過程。
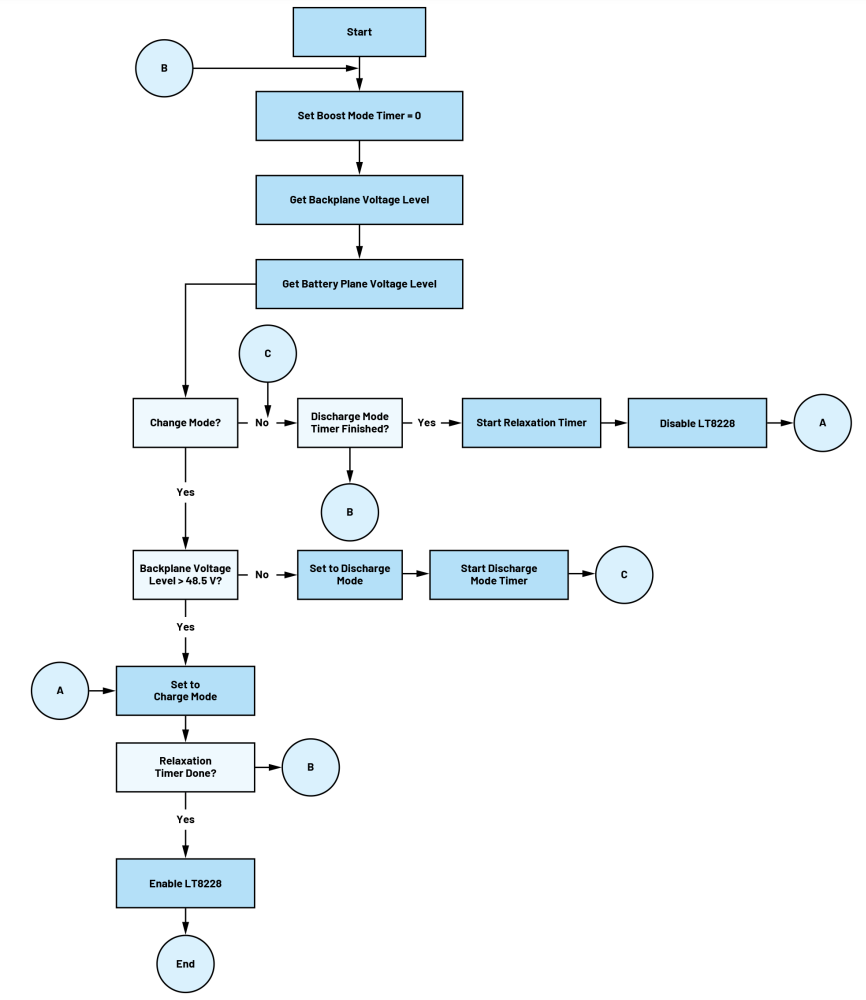
圖3.充放電模式轉換的處理操作
04故障處理和響應
制定明確的故障處理計劃非常重要。為了避免產生壓力和得到不好的結果,提前發現潛在問題并制定處理方案至關重要。如需確保系統操作順利運行,了解即將發生的情況,那么與相關系統中集成的器件進行順暢通信也是非常必要的。請記住,錯誤和故障難以完全避免,而應對方式才是決定結果的關鍵。因此,微控制器經過專門設計,可減少OCP指定故障的誤報發生率。微控制器中的固件程序執行算法檢查以檢測可能觸發故障的前兆現象。檢測到相關征兆后,算法將執行驗證檢查,只有在問題連續發生或在設定的周期數內發生時,才會確認故障。這種做法非常明智,可以確保識別和解決真正的故障。
05作為Modbus從機響應Modbus命令
Modbus功能代碼對于在Modbus網絡的器件之間建立通信至關重要。這些代碼確定器件之間發送的請求或響應的類型,例如讀取或寫入數據。一些比較常見的Modbus功能代碼包括模塊指標、模塊工作狀態、模塊寄存器地址和故障狀態。
Modbus命令的處理完全由微控制器控制。微控制器可以為OCP規范認為必要的所有基本Modbus命令提供支持。這些命令有權更改模塊的設置,或提供有關電池SOC、運行狀況、電芯電壓水平、充電和放電電流以及其他參數的重要信息。微控制器驗證消息后,就會根據收到的命令做出響應。
微控制器利用ADM2561和ADM30611收發器,通過UART協議處理來自各種外設的數據,并將其傳輸到機架微控制器,如圖4所示。采用隔離型收發器的優點在于,它不受系統級電磁干擾的影響,并且符合OCP制定的電磁兼容性(EMC)標準。此外,機架到PC的通信是通過ADM2561完成的,ADM2561通過DB9(D-Subminiature)連接器和RJ45互聯網端口連接到主機PC。
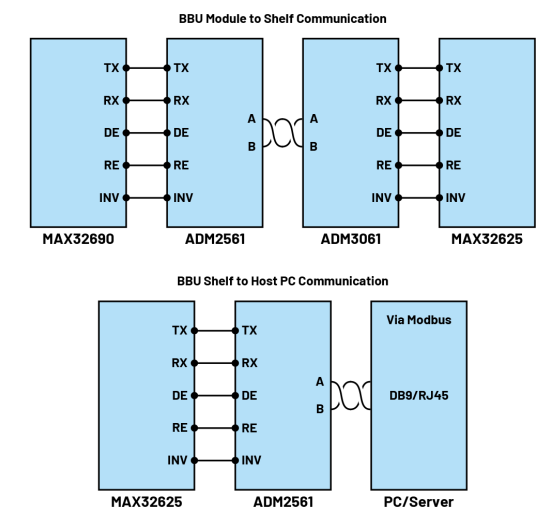
圖4.模塊到機架通信和機架到PC通信框圖
06總結
控制器架構必須要滿足穩健可靠、高效且適應性強的要求,同時應該具有明確定義的輸入和輸出,并可以處理復雜算法例程。該架構應該是模塊化的,以便支持無縫的算法更改和更新。此外還應內置有安全機制,以防范系統故障或事故,并能輕松處理意外事件。總的來說,高質量的控制器架構應提供可靠且高效的系統控制,同時可以降低錯誤或故障發生的概率。
原文轉自亞德諾半導體
-
微控制器
+關注
關注
48文章
7559瀏覽量
151468 -
測量
+關注
關注
10文章
4864瀏覽量
111350 -
電池
+關注
關注
84文章
10582瀏覽量
129798
發布評論請先 登錄
相關推薦
什么是微控制器
能進行充電和監控備用電源控制器LTC3350
微控制器的發展怎么樣
通過Piccolo微控制器單元的模擬比較器功能討論
AT73C224 四信道功率管理單元,面向32位微控制器
什么是微控制器?如何編程微控制器?

用于高精度運動控制的微控制器





 工商網監
工商網監
評論