 CAN總線數據偶爾出錯原因
CAN總線數據偶爾出錯原因
CAN總線(Controller Area Network)是一種用于汽車和工業自動化領域的通信協議。它具有高可靠性、實時性和靈活性,被廣泛應用于汽車、工業、醫療等領域。然而,在實際應用中,CAN總線數據偶爾會出現錯誤,影響系統的正常運行。
一、CAN總線概述
1.1 CAN總線定義
CAN總線是一種基于時間分割的多主通信協議,它允許多個設備在同一總線上進行通信。CAN總線具有高可靠性、實時性和靈活性,適用于汽車、工業、醫療等領域。
1.2 CAN總線特點
(1)高可靠性:CAN總線采用差分信號傳輸,具有較強的抗干擾能力,適用于惡劣的工作環境。
(2)實時性:CAN總線采用時間分割的通信方式,具有較高的實時性。
(3)靈活性:CAN總線支持多種通信速率,可以根據實際需求選擇合適的通信速率。
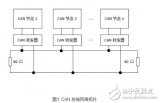
(4)網絡拓撲:CAN總線采用線性拓撲結構,易于布線和維護。
1.3 CAN總線通信過程
CAN總線的通信過程包括以下幾個步驟:
(1)幀起始:發送設備發送幀起始信號,開始通信。
(2)仲裁:多個設備同時發送數據時,根據仲裁規則確定優先級。
(3)數據傳輸:發送設備將數據按字節傳輸到總線上。
(4)應答:接收設備收到數據后,發送應答信號。
(5)幀結束:發送設備發送幀結束信號,結束通信。
二、CAN總線數據出錯的原因
2.1 硬件故障
硬件故障是導致CAN總線數據出錯的主要原因之一。以下是一些常見的硬件故障:
(1)連接器接觸不良:連接器接觸不良會導致信號傳輸不穩定,從而影響數據的正確傳輸。
(2)電纜損傷:電纜損傷會導致信號傳輸受阻,影響數據的正確傳輸。
(3)終端電阻故障:CAN總線需要在兩端安裝終端電阻,如果終端電阻損壞,會導致信號反射,影響數據的正確傳輸。
(4)設備故障:CAN總線上的設備故障也會導致數據出錯,例如微控制器故障、CAN控制器故障等。
2.2 軟件故障
軟件故障也是導致CAN總線數據出錯的原因之一。以下是一些常見的軟件故障:
(1)驅動程序問題:驅動程序是操作系統與硬件之間的橋梁,如果驅動程序出現問題,可能導致數據傳輸錯誤。
(2)通信協議錯誤:如果通信協議實現不正確,可能導致數據傳輸錯誤。
(3)數據格式錯誤:如果數據格式不符合CAN總線協議要求,可能導致數據傳輸錯誤。
(4)程序邏輯錯誤:程序邏輯錯誤可能導致數據傳輸錯誤,例如發送錯誤的數據、接收錯誤的數據等。
2.3 電磁干擾
電磁干擾是影響CAN總線數據傳輸的另一個重要因素。以下是一些常見的電磁干擾源:
(1)電源干擾:電源不穩定或電源線路存在干擾,可能導致CAN總線數據出錯。
(2)射頻干擾:射頻干擾是最常見的電磁干擾源之一,可能導致CAN總線數據出錯。
(3)電機干擾:電機運行時產生的電磁場可能對CAN總線數據傳輸產生干擾。
(4)其他設備干擾:其他設備運行時產生的電磁場也可能對CAN總線數據傳輸產生干擾。
2.4 網絡拓撲問題
網絡拓撲問題也可能導致CAN總線數據出錯。以下是一些常見的網絡拓撲問題:
(1)總線長度過長:總線長度過長會導致信號衰減,影響數據的正確傳輸。
(2)分支過多:過多的分支可能導致信號反射,影響數據的正確傳輸。
(3)總線負載過重:總線負載過重可能導致信號傳輸不穩定,影響數據的正確傳輸。
三、CAN總線數據出錯的解決方案
3.1 硬件故障解決方案
針對硬件故障,可以采取以下措施:
(1)檢查連接器:定期檢查連接器,確保連接器接觸良好。
(2)檢查電纜:定期檢查電纜,發現損傷及時更換。
(3)檢查終端電阻:定期檢查終端電阻,確保終端電阻正常工作。
(4)檢查設備:定期檢查CAN總線上的設備,發現故障及時更換。
3.2 軟件故障解決方案
針對軟件故障,可以采取以下措施:
(1)更新驅動程序:定期更新驅動程序,確保驅動程序與硬件兼容。
(2)檢查通信協議:確保通信協議實現正確,遵循CAN總線協議要求。
(3)檢查數據格式:確保數據格式符合CAN總線協議要求。
(4)檢查程序邏輯:確保程序邏輯正確,避免發送錯誤或接收錯誤的數據。
3.3 電磁干擾解決方案
針對電磁干擾,可以采取以下措施:
(1)穩定電源:確保電源穩定,避免電源干擾。
(2)屏蔽射頻干擾:采用屏蔽電纜、屏蔽接地等措施,減少射頻干擾。
-
CAN總線
+關注
關注
145文章
1952瀏覽量
130861 -
通信協議
+關注
關注
28文章
894瀏覽量
40334 -
數據
+關注
關注
8文章
7081瀏覽量
89177 -
工業自動化
+關注
關注
17文章
2427瀏覽量
67288
發布評論請先 登錄
相關推薦
CAN總線支線太長的解決方案
ADS1278讀到的數據偶爾會出錯,為什么?
CAN總線性能下降的原因
GD32F303RC使用nano時偶爾會出現CAN發送失敗是什么原因?如何處理?
CAN總線是什么?CAN總線數據鏈路層又是什么?
485總線為什么要隔離_RS485總線隔離原因如何測試揭秘







 工商網監
工商網監
評論