") 歐姆龍plc之間怎么通訊
歐姆龍plc之間怎么通訊
歐姆龍PLC(Programmable Logic Controller,可編程邏輯控制器)是一種廣泛應(yīng)用于工業(yè)自動(dòng)化領(lǐng)域的控制設(shè)備。在實(shí)際應(yīng)用中,PLC之間需要進(jìn)行通訊以實(shí)現(xiàn)數(shù)據(jù)交換和協(xié)同控制。本文將詳細(xì)介紹歐姆龍PLC之間的通訊方式、通訊協(xié)議、硬件連接以及編程實(shí)現(xiàn)等方面的內(nèi)容。
- 歐姆龍PLC通訊方式
歐姆龍PLC支持多種通訊方式,包括但不限于以下幾種:
1.1 串行通訊(RS-232/RS-485)
串行通訊是PLC之間最基本的通訊方式,通過RS-232或RS-485接口實(shí)現(xiàn)數(shù)據(jù)傳輸。RS-232是一種短距離、低速率的串行通訊方式,適用于小型系統(tǒng);RS-485則是一種長距離、高速率的串行通訊方式,適用于大型系統(tǒng)。
1.2 以太網(wǎng)通訊
以太網(wǎng)通訊是現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域中應(yīng)用最廣泛的通訊方式之一。通過以太網(wǎng)接口,PLC之間可以實(shí)現(xiàn)高速、大容量的數(shù)據(jù)傳輸。
1.3 無線通訊
無線通訊是一種新型的通訊方式,通過無線網(wǎng)絡(luò)實(shí)現(xiàn)PLC之間的數(shù)據(jù)傳輸。無線通訊具有安裝方便、靈活性高的優(yōu)點(diǎn),但可能受到信號(hào)干擾等因素的影響。
1.4 現(xiàn)場(chǎng)總線通訊
現(xiàn)場(chǎng)總線通訊是一種基于總線技術(shù)的通訊方式,如Profibus、Modbus等。現(xiàn)場(chǎng)總線通訊可以實(shí)現(xiàn)多臺(tái)PLC之間的數(shù)據(jù)交換,適用于復(fù)雜的工業(yè)控制系統(tǒng)。
- 歐姆龍PLC通訊協(xié)議
2.1 串行通訊協(xié)議
串行通訊協(xié)議主要包括ASCII碼和二進(jìn)制碼兩種。ASCII碼是一種基于字符的通訊方式,適用于文本數(shù)據(jù)的傳輸;二進(jìn)制碼則是一種基于數(shù)據(jù)的通訊方式,適用于控制指令和數(shù)據(jù)的傳輸。
2.2 以太網(wǎng)通訊協(xié)議
以太網(wǎng)通訊協(xié)議主要包括TCP/IP協(xié)議和UDP協(xié)議。TCP/IP協(xié)議是一種面向連接的通訊方式,具有數(shù)據(jù)傳輸可靠、有序的優(yōu)點(diǎn);UDP協(xié)議則是一種無連接的通訊方式,具有傳輸速度快、實(shí)時(shí)性好的優(yōu)點(diǎn)。
2.3 無線通訊協(xié)議
無線通訊協(xié)議主要包括Wi-Fi、藍(lán)牙、ZigBee等。這些協(xié)議具有不同的傳輸速率、傳輸距離和功耗特性,適用于不同的應(yīng)用場(chǎng)景。
2.4 現(xiàn)場(chǎng)總線通訊協(xié)議
現(xiàn)場(chǎng)總線通訊協(xié)議主要包括Profibus、Modbus、CAN等。這些協(xié)議具有不同的數(shù)據(jù)傳輸速率、網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)和實(shí)時(shí)性要求,適用于不同的工業(yè)控制系統(tǒng)。
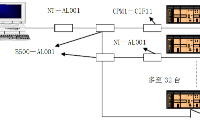
- 歐姆龍PLC硬件連接
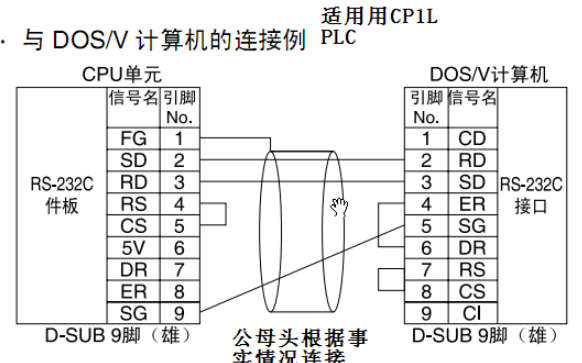
3.1 串行通訊連接
串行通訊連接需要使用RS-232或RS-485接口。RS-232接口通常使用9針D-sub連接器,RS-485接口則使用9針或4針D-sub連接器。連接時(shí)需要按照PLC的接口定義進(jìn)行接線。
3.2 以太網(wǎng)通訊連接
以太網(wǎng)通訊連接需要使用RJ45接口。連接時(shí)需要使用網(wǎng)線將PLC的以太網(wǎng)接口連接到交換機(jī)或路由器上。
3.3 無線通訊連接
無線通訊連接需要使用無線模塊或無線網(wǎng)關(guān)。連接時(shí)需要將無線模塊或網(wǎng)關(guān)與PLC的串行或以太網(wǎng)接口連接,并進(jìn)行相應(yīng)的配置。
3.4 現(xiàn)場(chǎng)總線通訊連接
現(xiàn)場(chǎng)總線通訊連接需要使用相應(yīng)的總線接口。連接時(shí)需要將PLC的總線接口與總線耦合器或總線中繼器連接,并按照總線協(xié)議進(jìn)行接線。
- 歐姆龍PLC編程實(shí)現(xiàn)
4.1 串行通訊編程
串行通訊編程主要包括設(shè)置通訊參數(shù)、編寫通訊程序和調(diào)試通訊過程。通訊參數(shù)包括波特率、數(shù)據(jù)位、停止位和校驗(yàn)位等。通訊程序需要根據(jù)通訊協(xié)議編寫數(shù)據(jù)發(fā)送和接收的邏輯。
4.2 以太網(wǎng)通訊編程
以太網(wǎng)通訊編程主要包括設(shè)置IP地址、端口號(hào)等參數(shù),編寫TCP/IP或UDP通訊程序。通訊程序需要實(shí)現(xiàn)數(shù)據(jù)的封裝、傳輸和解析等功能。
4.3 無線通訊編程
無線通訊編程需要根據(jù)所使用的無線通訊協(xié)議進(jìn)行編程。編程過程中需要實(shí)現(xiàn)數(shù)據(jù)的封裝、傳輸和解析等功能,并考慮信號(hào)干擾和傳輸速率等因素。
4.4 現(xiàn)場(chǎng)總線通訊編程
現(xiàn)場(chǎng)總線通訊編程需要根據(jù)所使用的現(xiàn)場(chǎng)總線協(xié)議進(jìn)行編程。編程過程中需要實(shí)現(xiàn)數(shù)據(jù)的封裝、傳輸和解析等功能,并考慮網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)和實(shí)時(shí)性要求等因素。
- 結(jié)論
歐姆龍PLC之間的通訊是實(shí)現(xiàn)工業(yè)自動(dòng)化控制的關(guān)鍵技術(shù)之一。通過選擇合適的通訊方式、通訊協(xié)議和硬件連接方式,并進(jìn)行合理的編程實(shí)現(xiàn),可以確保PLC之間的數(shù)據(jù)交換和協(xié)同控制的可靠性和實(shí)時(shí)性。
-
數(shù)據(jù)交換
+關(guān)注
關(guān)注
0文章
104瀏覽量
17944 -
通訊協(xié)議
+關(guān)注
關(guān)注
10文章
277瀏覽量
20374 -
工業(yè)自動(dòng)化
+關(guān)注
關(guān)注
17文章
2427瀏覽量
67288 -
歐姆龍PLC
+關(guān)注
關(guān)注
1文章
27瀏覽量
3883
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
關(guān)于西門子PLC跟歐姆龍PLC之間的通訊

下歐姆龍PLC中斷程序的編寫

歐姆龍PLC遠(yuǎn)程控制實(shí)例
如何實(shí)現(xiàn)在IPC上的labview程序和歐姆龍PLC的通訊
歐姆龍PLC技術(shù)

歐姆龍CP1L-EL轉(zhuǎn)Modbus協(xié)議歐姆龍PLC轉(zhuǎn)Modbus協(xié)議

歐姆龍plc以太網(wǎng)通訊設(shè)置

歐姆龍PLC串口通訊詳解





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論