 力控、柔性觸覺成為核心需要,機器人要打造怎樣的具身傳感系統
力控、柔性觸覺成為核心需要,機器人要打造怎樣的具身傳感系統
電子發燒友網報道(文/莫婷婷)具身智能指的是智能系統或機器通過感知和交互與環境進行實時互動的能力,也是人工智能發展的分支。2024年被認為是具身智能產業發展元年,與此相關的產業正在逐漸發展起來,例如機器人。
業內人士認為,具身智能機器人是人工智能終極形態。具身智能機器人指的是機器人能像人一樣進行環境交互感知、自主規劃、決策、行動、執行任務等。在真正完成具身智能升級之前,傳感器將在這個過程中發揮關鍵作用。
那么,具身智能對傳感器有怎么樣的需求呢?先從感知功能來看。
感知包括視覺聽覺味覺觸覺等,具身智能機器人在進行不同的感知需要不同的傳感器,例如視覺感知需要CMOS,聽覺需要Mic振動傳感器,痛覺需要力傳感器、溫度傳感器等,前庭覺需要IMU,本體覺需要超聲波距離傳感器,味覺、觸覺、嗅覺也需要能實現相應功能的傳感器,例如觸覺陣列等。
只有一套完整的具身傳感系統才能讓機器人實現真正具身智能,通過感知的傳遞才能完成對運動控制的指導。
天太機器人仿生機器人BU負責人劉瑗瑗認為,傳感會引起運動控制的范式變化,這種變化包括來自視覺、運動路徑規劃、五感對齊以及預測運動控制下一幀等。例如在抓握某件物品的時候,會先利用傳感器判斷方位,再判斷物品的大小,調整伸手距離等,再通過力覺傳感器調整抓握力,進而完成一系列動作。
目前來看,在機器人的感知中,力控、柔性觸覺控制是核心需求。此前,特斯拉就在一段視頻中展示了特斯拉人形機器人 Optimus Gen2抓取、傳遞雞蛋,要實現拿得穩且不會捏碎雞蛋,就需要依靠觸覺系統,特別是柔性觸覺傳感器。
柔性觸覺傳感器分為:壓阻式(電阻)、壓電式、電容式、光電式等,電容式占據約五成的市場份額。當前柔性觸控控制最關鍵的是要解決壓感、滑動感的問題,也就是解決不捏碎、拿得穩的問題,接下來才是形狀、材質、溫度等需求。
在2023年,帕西尼發布了人形機器人Tora,兩只手上搭載了超過100顆多維觸覺傳感器。官網顯示,多維觸覺傳感器PX-6AX的力控精度高達0.01N,也就是最小可測量0.01N的力,采樣頻率達1000HZ,能實現多軸輸出、多元部署,可測量壓覺、力覺、滑覺等 15 種物理量,能捕捉接觸面上亞毫米級別的微小變形。
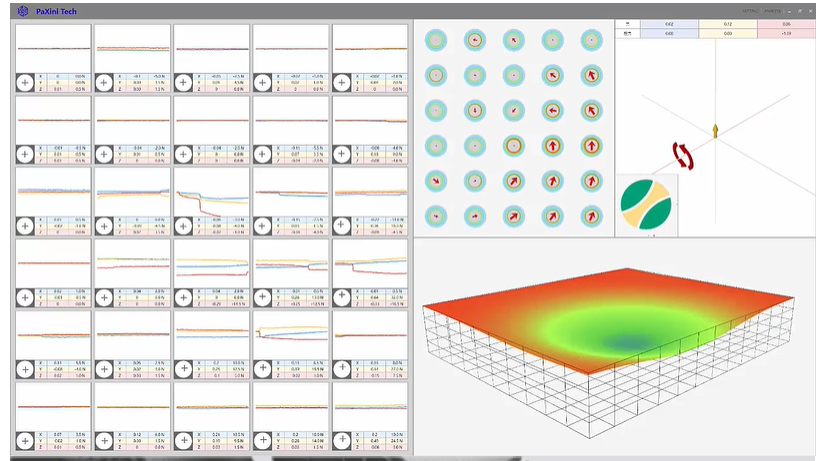
圖:PX-6AX功能解析(帕西尼)
在力控方面,力傳感器是關鍵的元器件。按照測量維度,力覺傳感器可以分為一至六維力傳感器的不同,能夠同時測量中性坐標系(OXYZ)內的三個力(FX 、FY 、FZ)和三個力矩(MX 、MY 、MZ)。目前機器人力控解決方案以維度最高的六維力傳感器的應用較多。根據傳感元件的不同,六維力傳感器又可以分為應變片式、光學式以及壓電/電容式等。
宇力儀器在官網展示了能夠應用于機器人&通用測試的六軸力傳感器M37XX系列。根據介紹,這是矩陣解耦型六軸力傳感器,直徑15至135mm,精度5至6400N,0.5至320Nm。在其他方面,M37XX系列非線性、遲滯小于0.5%F.S,串擾小于2%F.S。
在機器人的應用中,除了精度,重量、價格都是考量力傳感器的關鍵要素之一。未來,隨著機器人要掌握更多的技能,不僅僅是力控、柔性觸覺控制,視覺等其他傳感器都需要隨之迭代,以滿足不同的應用領域需求。
-
傳感器
+關注
關注
2551文章
51193瀏覽量
754410 -
機器人
+關注
關注
211文章
28476瀏覽量
207416 -
傳感系統
+關注
關注
1文章
89瀏覽量
16892 -
具身智能
+關注
關注
0文章
47瀏覽量
86
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】+兩本互為支持的書
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
《具身智能機器人系統》第7-9章閱讀心得之具身智能機器人與大模型
【「具身智能機器人系統」閱讀體驗】+數據在具身人工智能中的價值
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
具身智能在機器人技術中的發展
廣和通發布基于高通高算力芯片的具身智能機器人開發平臺Fibot

廣和通發布基于高通高算力芯片的具身智能機器人開發平臺Fibot
廣和通發布基于高通高算力芯片的具身智能機器人開發平臺Fibot





 工商網監
工商網監
評論