 基于微控制器的太陽能充電器的電路和工作原理
基于微控制器的太陽能充電器的電路和工作原理
“基于微控制器的太陽能充電器”項目非常受歡迎,每個人都知道它。在這里,我們將討論該項目的施工細節和適用領域。
由于過度的不可再生能源消耗,我們人類面臨著許多困難。可再生能源被認為是我們擺脫這種局面的唯一希望。太陽能就是其中之一,因其易于獲得、有效成本和可靠性而遍布各地。“基于微控制器的太陽能充電器”項目是展示我們周圍資源的輕松利用并從中獲取盡可能多的好處的最好例子。
最近的照明系統,包括太陽能燈、家庭照明系統、路燈、庭院燈、熱水器和太陽能電池組,都由太陽能驅動電力。如果你正在考慮如何將這種自然形式的能量轉化為這些設備的動力,那么讓我告訴你。該變換系統僅包括四個主要組件:太陽能光伏
(PV) 組件、可充電電池、太陽能充電控制器和負載。
在這里,光伏組件捕獲光線,可充電電池充當能量倉庫,負載包括要供電的設備。太陽能充電控制器考慮到根據可充電電池的容量在電池中存儲足夠的電荷這一事實。因此,它在整個系統中起著至關重要的作用,成為太陽能電池板、電池和負載之間的關鍵環節。
通用組件 LCD 描繪了系統的當前狀態。
基于微控制器的太陽能充電器的電路和工作原理
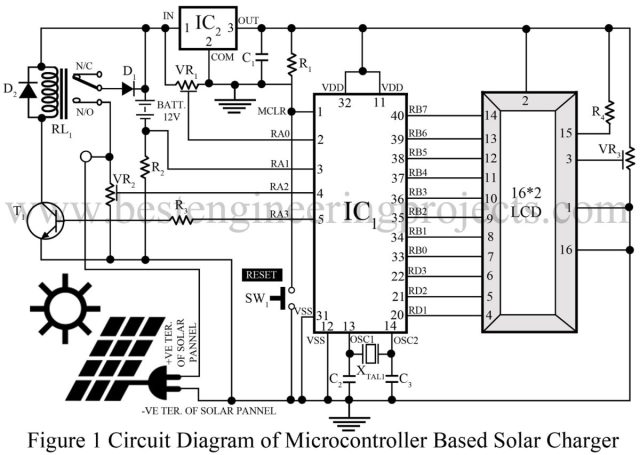
“基于微控制器的太陽能充電器”項目是圍繞PIC16F877A(IC1)微控制器作為主要組件制造的。除此之外,該項目還采用了調節器7805(IC2)和一些分立元件。基于微控制器的太陽能充電器的整個電路布局如圖1所示。
談論中心組件;PIC16F877A,它為業余愛好和產業發展提供了理想的解決方案,同時證明了自己值得普及和強大。該IC采用哈佛架構。充電控制操作由該組件通過太陽能電池板執行。
關于核心組件的迷人事實;8 位微控制器功耗低,但性能最佳。8kB 閃存、256 字節 EEPROM、368 字節 RAM、33 個輸入/輸出
(I/O) 引腳、10 位 8 通道模數轉換器 (ADC) 和 3
個定時器等多種特性使該器件更具吸引力。為確保可靠性,它還具有片上R-C振蕩器,在同步I2C接口中至關重要。簡單指令的數量,這個設備可以處理是35。這些指令大多是單周期的,分支有雙周期指令。
對于帶微控制器的 LCD 接口,LCD 模塊的數據引腳 D0-D7 與微控制器的端口引腳 RB0-RB7 連接。同樣,LCD 的
RS(寄存器選擇)、R/W(讀/寫)和 E(使能)連接到端口引腳 RD1、RD2 和 RD3。對于對比度控制,使用預設的
VR3。為了執行手動復位操作,開關SW1包含在電路中。微控制器所需的基本時鐘頻率由一個 4MHz 晶振和兩個 33pF 電容組合提供。
微控制器的三個特定引腳監控參數狀態。這些端口引腳 RA0、RA1 和 RA2
收集所需的輸入,以分別連續檢查電池電壓、充電電流和太陽能電池板電壓。因此,根據收集到的信息,對整個過程進行控制,并在LCD模塊上顯示有意義的信息。一旦端口引腳
RA3 變為高電平,太陽能電池板和電池之間的連接就會建立,然后晶體管 T1 變得飽和并且繼電器 RL1 通電。
微控制器和 LCD 模塊的 +5 V 穩壓電源由穩壓器 7805 提供。根據電壓,充電過程可以通過兩種不同的方式進行——升壓和涓流。12V
是確定電池是在升壓模式還是涓流模式下充電的定義參數。對于低于 12V
的電壓,充電在升壓模式下完成,對于更高的電壓,則激活涓流模式。在涓流模式下,電池以放電速率充電。
“基于微控制器的太陽能充電器”項目還提供了有關太陽能電池板收集的能量限制的必要信息。這些信息被用來估算可以從太陽本身提取的確切能量。
基于微控制器的太陽能充電器的構建和測試
圖2和圖3分別給出了基于PIC16F877A微控制器的太陽能充電器的精確單面PCB布局及其完整的組件布局。強烈建議在PCB上執行組裝過程,以在一定程度上避免時間和組裝錯誤。但是,在組裝組件時必須格外小心,并且必須仔細檢查忽略的錯誤。為了消除組裝過程中對
IC 的可能損壞,使用了 IC 基座。為確保安全,在放置IC之前,在測試點TP1處檢查電源電壓(5V),如圖所示。
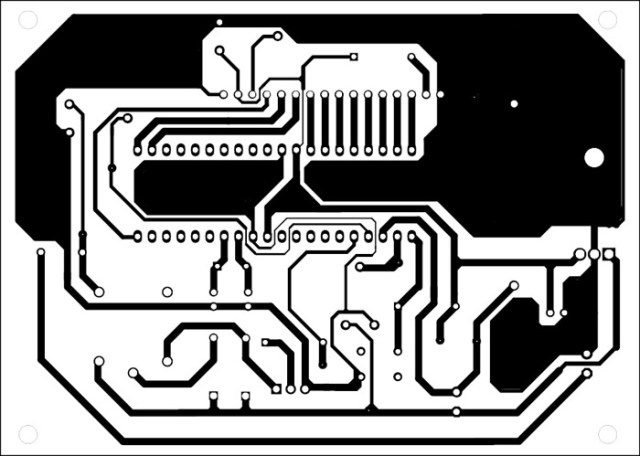
圖 2:基于微控制器的太陽能充電器的焊邊 PCB
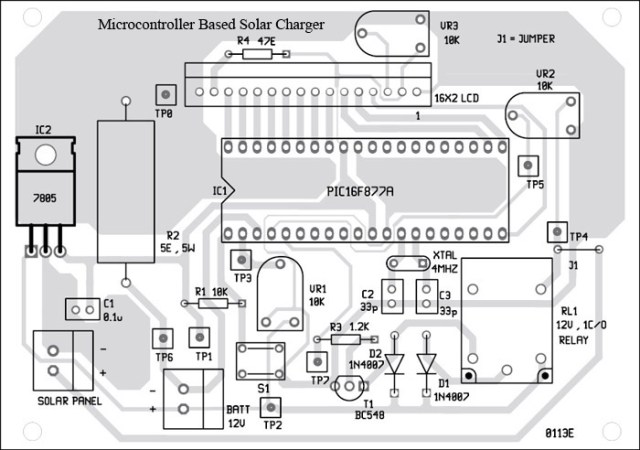
圖3:基于微控制器的太陽能充電器的組件側PCB
為了避免進一步的復雜化,在實施電路之前,系統會針對電池和太陽能電壓進行校準。而且,這是通過以下方式完成的:-
電池電壓 |基于微控制器的太陽能充電器
斷開項目中使用的電池。然后在 IC2 (7805) 的輸入點接地處施加 20V。在 IC1 (PIC16F877) 的引腳 2
處,使用萬用表檢查電壓值。之后,通過改變預設的 VR1 以獲得 5V 來對電路進行必要的調整。同樣,在 IC1 (PIC16F877) 的引腳 4
處進行電壓測試,以確保該點的電壓為 5V。當電池連接回系統時,IC1 (PIC16F877) 引腳 2 處的電壓值必須約為 3V。
太陽能電壓 |基于微控制器的太陽能充電器
沒收電路中的太陽能電池板。將 12V 電池連接到與地面相關的太陽能正極端子上,然后監控 IC1 (PIC16F877) 引腳 4
處的電壓電平。現在,預設的 VR2 被調整為獲得 3V。在 IC1 (PIC16F877) 的引腳 7 處,我們可以檢查繼電器 RL1 是否使能。
在完成所有這些校準步驟后,“基于微控制器的太陽能充電器”電路就可以植入了。該電路產生太陽能,該值以每秒瓦特為單位計算并顯示在 LCD
上。為了獲得以瓦特秒為單位的能量,功率是積分的。
LCD的信息列表,按照下面給出的順序:
電池電壓(毫伏)
2.電池電流(毫安)
3.能量(瓦特秒)
4.功率(瓦)
5.太陽能電池板電壓(毫伏)
6.充電器模式:升壓或涓流
基于微控制器的太陽能充電器軟件代碼
程序代碼編寫簡單;基本語言,因此易于理解。Oshonsoft 的 PIC Simulator IDE 用于編譯項目代碼。IDE
是一個簡單的軟件,它提供了一種使用基本命令對系統進行編程的簡單方法,然后在編譯后生成相應的十六進制代碼。另一種稱為程序刻錄機或編程器的設備用于刻錄/加載,因此生成的十六進制代碼被放入微控制器中。
電路“基于微控制器的太陽能充電器”首先檢測太陽能電池板上的電壓,如果電壓超過 12.6 伏,則遵循流程圖上的下一條指令。而且,如果電壓讀數低于
12.6 伏,則一條信息;LCD 模塊上顯示“低太陽能伏特”,除非電壓大于定義的電壓,即 12.6V,否則它會重復。
在第二階段,監控電池電壓,并根據結果監控充電模式;決定提升或涓流模式。如前所述,對于超過 12V 的電池電壓,激活涓流模式,對于低于 12V
的電池,觸發升壓模式。在凌晨,還會讀取EEPROM的瓦時讀數,該讀數提供了從太陽獲得的功率的近似值。
“基于微控制器的太陽能充電器”項目包括一個計時器,每 65.56 毫秒生成一次中斷。在 ISR(中斷服務例程)中,15第計數是指每 65.56×15
=983.4 毫秒計算系統的功率和能量,即大約 1
秒。吸收的功率每秒積分一次,以獲得以瓦特秒為單位的能量。這些瓦時讀數直接存儲在微控制器的EEPROM中,以避免在斷電期間丟失數據。同樣,這可能導致 EEPROM
中的覆蓋。為了解決這個問題,每 30 分鐘按編程方式寫入 EEPROM。
基于微控制器的太陽能充電器的PAETS列表
電阻器(全部 1/4 瓦,± 5% 碳)
R1= 10 KΩ
R2= 5 Ω,5W
R3= 1.2 KΩ
R4= 47 ?
虛擬現實1– 虛擬現實3= 10 KΩ 預設
C1= 0.1 μF(陶瓷盤)
C2、C3= 33 pF (陶瓷盤)
集成電路1= PIC16F877A(微控制器)
集成電路2= 7805(5V系列線性穩壓器)
T1= BC548(通用NPN雙極結型晶體管)
D1、D2= 1N4007 (整流二極管)
雜項
西 南部1= 一鍵式輕觸開關
RL系列1= 12V,單轉換繼電器
XTAL1型= 4 MHz晶振
液晶顯示器1= 16 個字符*2 行 LCD 模塊
巴特1= 12V鉛酸電池
太陽能電池板
-
微控制器
+關注
關注
48文章
7570瀏覽量
151623 -
充電器電路
+關注
關注
4文章
77瀏覽量
30986 -
太陽能充電器
+關注
關注
1文章
44瀏覽量
18549
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論