 基于MATLAB仿真的車輛協調再生制動控制策略與集成線控制動系統開發
基于MATLAB仿真的車輛協調再生制動控制策略與集成線控制動系統開發
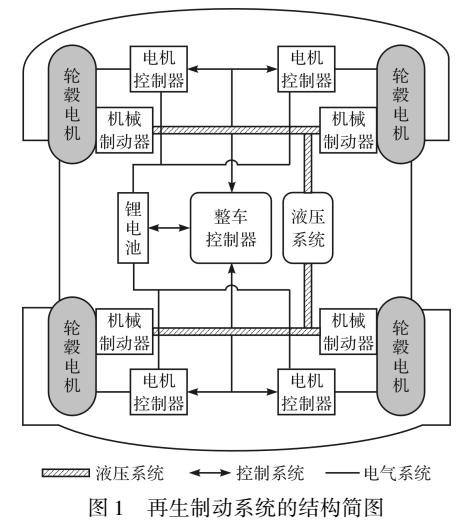
隨著汽車電氣化的發展,具有再生制動能力的電子液壓制動(EHB)和電機(EM)的集成帶來了在三種制動模式之間轉換的挑戰:電制動、液壓制動和混合制動。
車輛協調再生制動控制策略是一種旨在優化能量回收、提高車輛行駛效率、并確保制動過程平穩和安全的綜合控制方法。這種策略通過精確控制再生制動與傳統摩擦制動(如 EHB)的配合使用,實現了能量的有效回收和制動力切換。但是切換過程中由于電制動和液壓制動的系統特性不一致,則容易產生縱向運動不平順的問題,從而降低了汽車制動過程中的舒適性。
因此在設計集成線控制動系統時,不僅要考慮 ABS,ESC 控制的實現,也要集成設計車輛的系統再生制動策略。

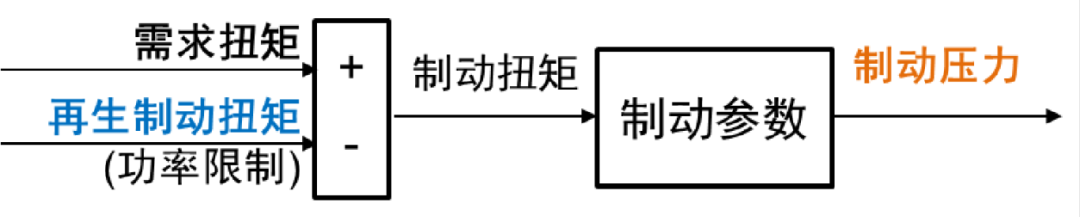
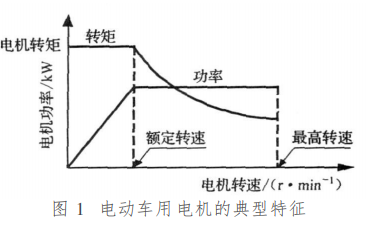
以上圖是一個典型的混合模式制動的扭矩分配。在車輛減速過程中,根據駕駛意圖給定制動需求扭矩。根據車輛狀態,如轉速和電池 SOC 等,確定電機制動扭矩的實施扭矩,剩余扭矩則由摩擦制動完成。 在設計該系統時候,需要考慮 :
動態制動力分配:
根據當前的車輛狀態(如速度、加速度)、電池狀態(充電水平、溫度)、以及駕駛員的制動需求,動態地分配再生制動力和摩擦制動力之間的比例。以最大化能量回收,同時滿足駕駛員對制動性能的要求。
平滑扭矩變化:
通過精細控制再生制動和摩擦制動的扭矩輸出,確保兩者之間的平滑過渡,避免給駕駛員帶來突兀的制動感覺。這涉及到復雜的控制算法,以預測和響應制動過程中的動態變化。
解析駕駛員意圖:
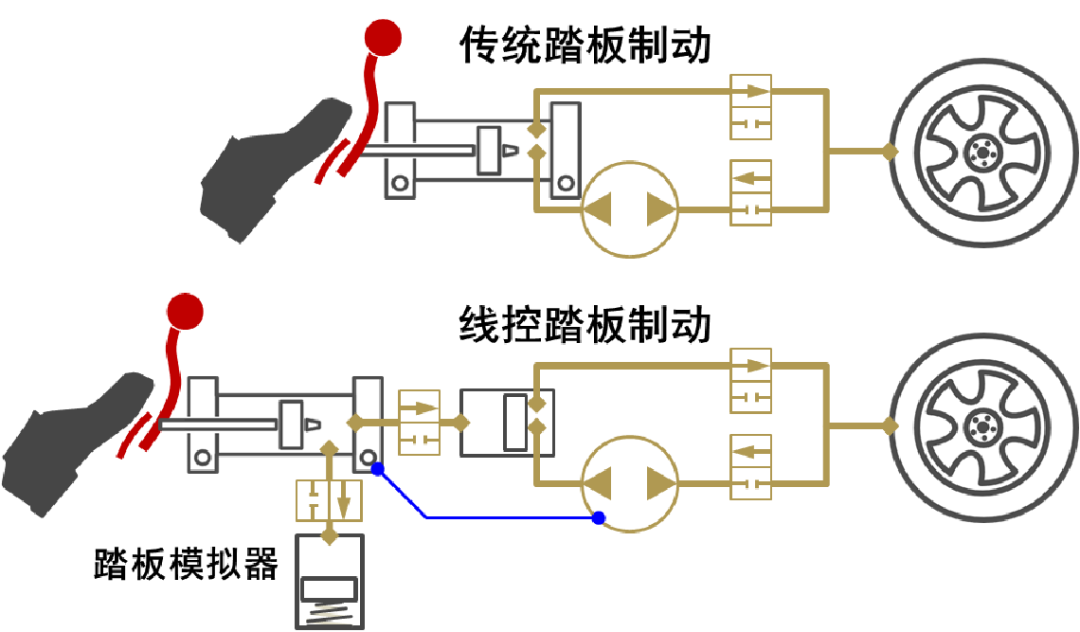
通過分析駕駛員對制動踏板的操作(踏板位置、踏板壓力變化速度等),判斷駕駛員的制動意圖(輕微減速、緊急制動等),并據此調整再生制動和摩擦制動的應用并且通過調整 EHB 系統的反饋機制,使得駕駛員在施加相同的踏板力時,能夠感受到與傳統制動系統相似的減速度。這涉及到開發踏板模擬器的部分。
開發與調試這樣的系統并不容易,因此虛擬化開發就顯得非常重要,利用虛擬化開發可以節省成本,在系統開發早期階段實現虛擬仿真驗證。
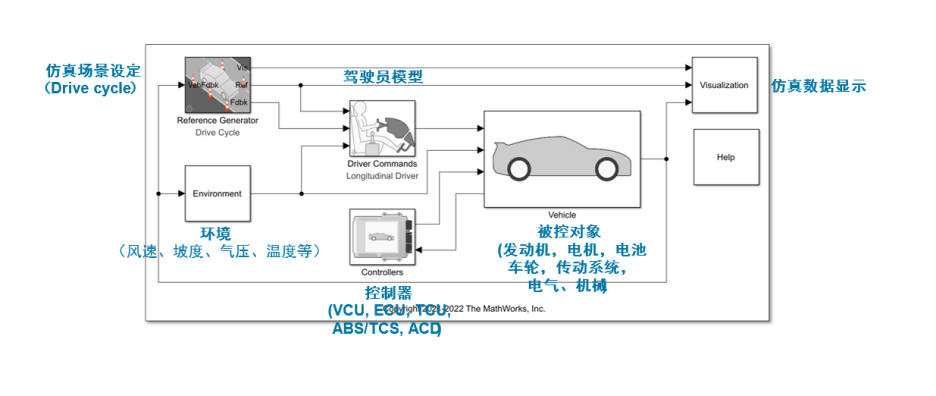
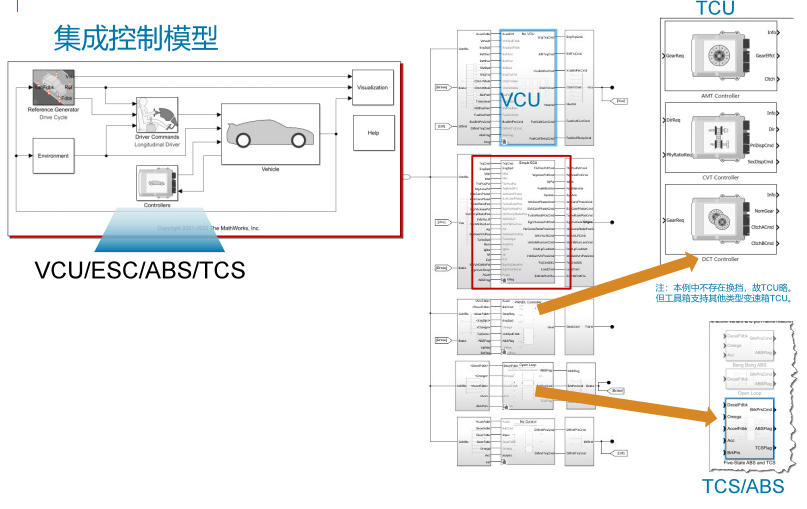
以集成制動系統控制為例,MATLAB 可以用于車輛閉環系統仿真,可以包括定義車輛模型,制動系統部件模型,設計控制器,建立閉環仿真模型來評估控制器設計等。從而可以幫助工程師設計和測試車輛控制系統,以開發更好的車輛性能。
整個工作我們可以搭建車輛模型,細化制動系統模型,集成控制策略,從而查看系統的響應結果。
車輛模型:
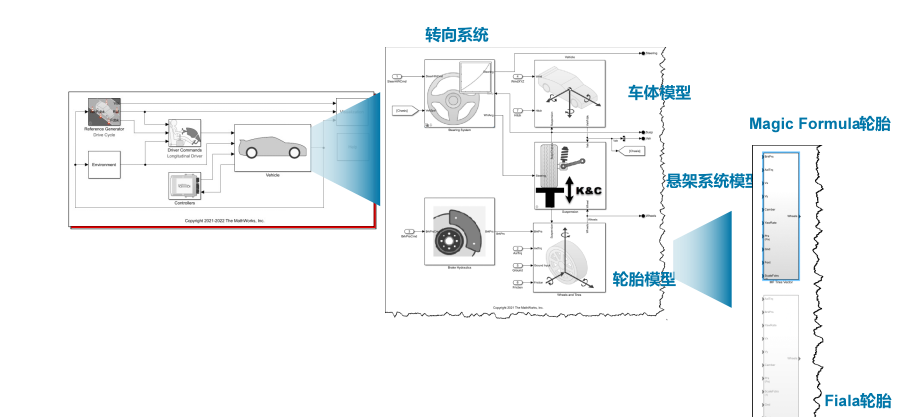
包括電動機、電池、再生制動系統、車輛動力學等關鍵組成部分。車輛模型應能夠準確反映車輛的物理和動力學特性。
使用 Vehicle Dynamic Blockset 快速搭建整車模型。
控制算法:
針對可再生協調制動系統需求,根據總的制動需求,系統會計算再生制動能夠提供的最大制動力。這一計算考慮了電池的充電狀態(SOC)及電池溫度的極限狀態、駕駛員的踏板開度,電機的性能限制、以及當前車速等因素。如果再生制動能夠滿足全部制動需求,則優先使用再生制動;如果再生制動力不足以滿足需求,則剩余的制動需求由傳統的摩擦制動系統來補充。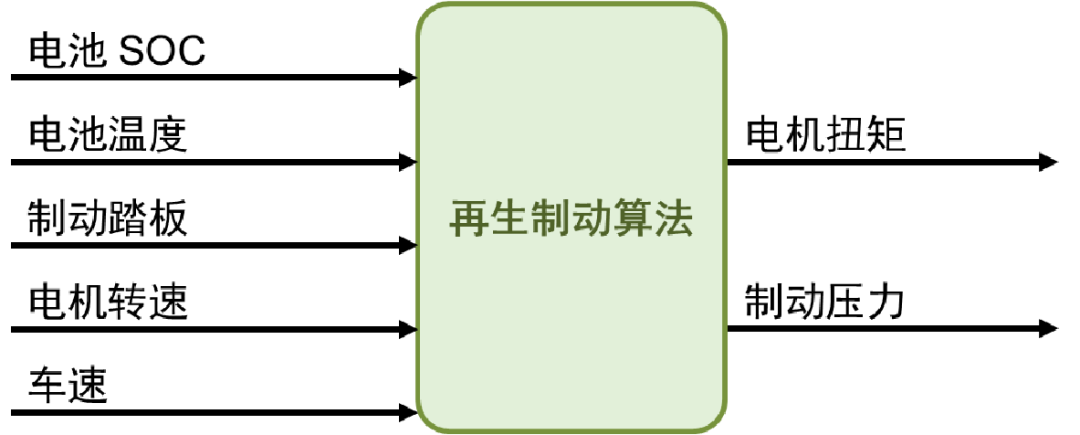
再生協調制動系統在進行制動扭矩分配時的算法邏輯基本如下:
1. 制動扭矩需求的確定
駕駛員輸入識別:系統首先通過分析駕駛員踏板的開度(踏板位置)來估算所需的總制動扭矩。這個過程可能涉及到特定的標定表格,這些表格考慮了踏板位置與制動扭矩需求之間的關系,確保制動扭矩的計算與實際車輛狀態相匹配。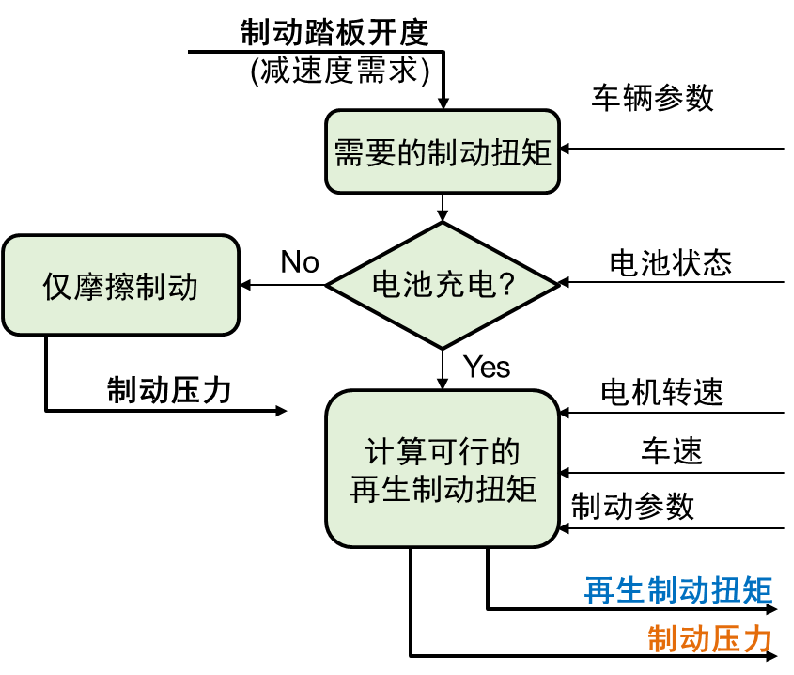
2.再生制動可行性的判斷
電池狀態檢查:
檢查電池是否有足夠的容量和適宜的狀態(如溫度、充電狀態等)來接收再生能量。
電機性能評估:
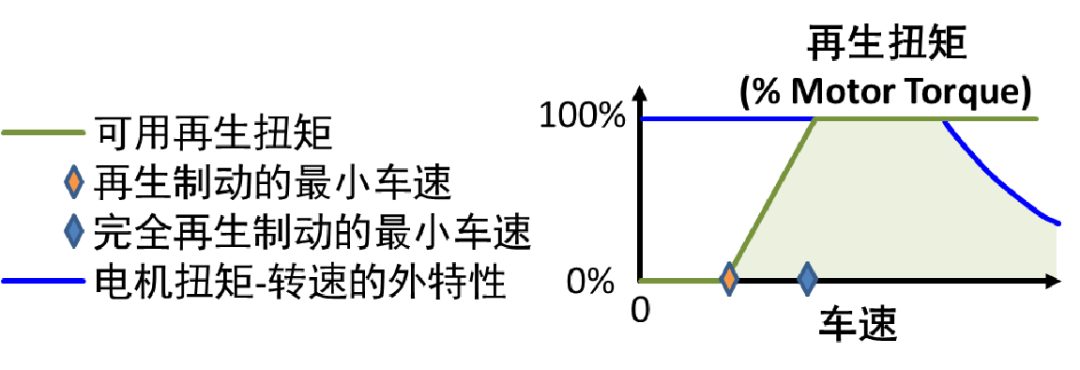
考慮電機的當前工作狀態(如轉速和溫度)以及其性能限制(最大扭矩和功率輸出)來確定可用于再生制動的最大扭矩。
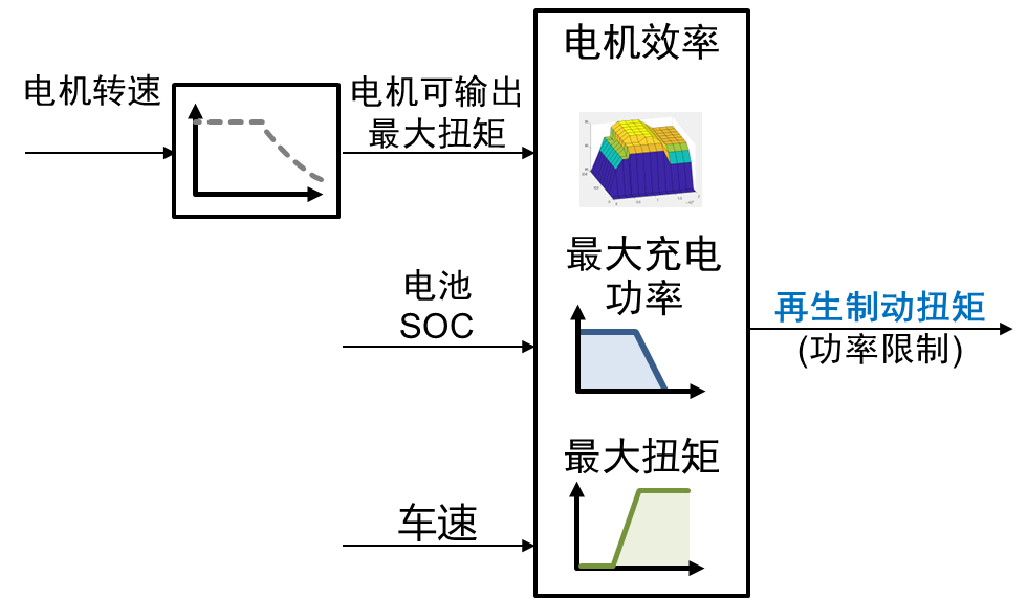
3.再生制動扭矩的計算與制動扭矩分配
如果再生制動是可行的,系統會根據電機的轉速、車速、制動參數等因素計算出一個可行的再生制動扭矩值。這個值是電機在當前條件下能夠安全提供的最大制動扭矩。系統將計算出的再生制動扭矩與總制動扭矩需求進行比較: 如果再生制動扭矩足以滿足總需求,系統將全部使用再生制動。 如果再生制動扭矩不足以滿足總需求,系統將使用再生制動提供部分扭矩,而剩余所需的扭矩將通過摩擦制動系統提供。
4.平滑過渡和優化
在從再生制動到摩擦制動的過渡過程中,系統需要確保這一過程的平滑性,避免給駕駛員帶來不適感。 制動扭矩在從再生制動切換到摩擦制動時,液壓系統的制動壓力控制是實現平滑過渡的一個重點和挑戰。這個過程中的關鍵是如何精確控制液壓制動系統,以便在再生制動力減少時,摩擦制動力能夠無縫補充,保持總制動力的連續和穩定。這往往與 EHB 的控制息息相關。 再生協調控制算法模塊會輸出電機制動扭矩,和由 EHB 系統需要提供的制動扭矩/制動壓力。
EHB 的液壓控制系統會根據該模塊輸出的目標制動壓力,通過調整液壓系統的柱塞泵轉速、閥門開關等實現制動輪缸上的目標壓力。EHB 系統的精確控制往往會影響這一特性。 為了更好的驗證集成的整車層級的再生協調控制算法和 EHB 液壓系統控制的精確性。一般我們除了要搭建整車模型之外,還要搭建液壓系統,從而完整的驗證集成制動控制算法。
制動液壓系統模型搭建:
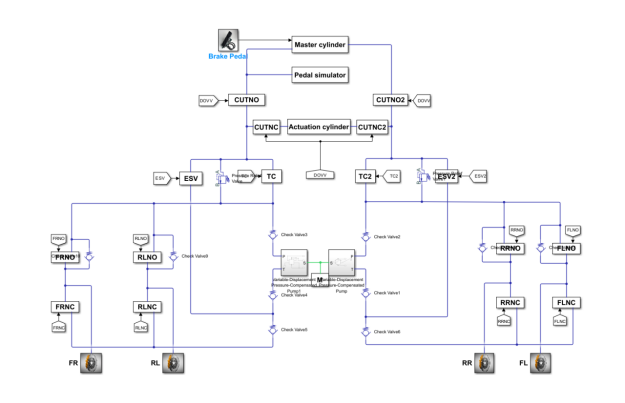
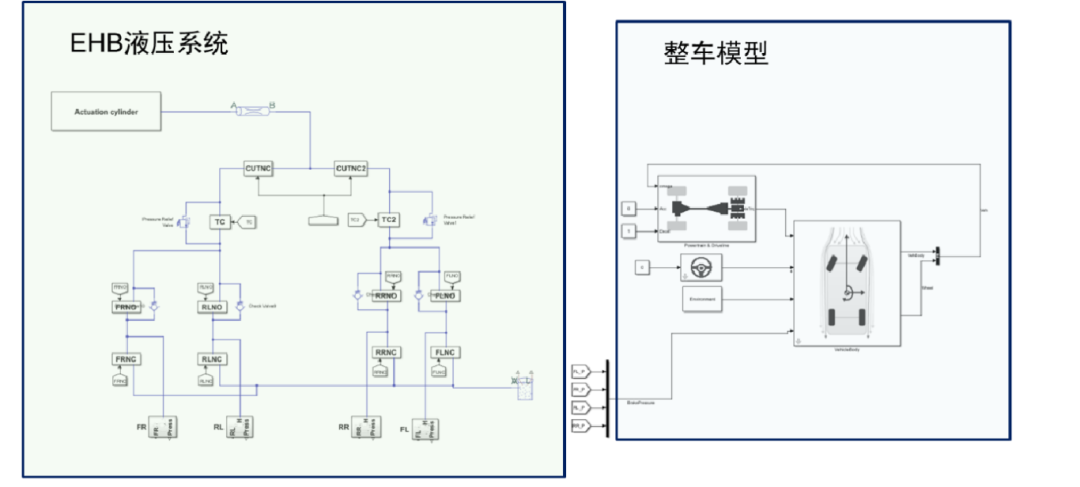
EHB 液壓系統模型的搭建會依賴于 Simscape Fluids 產品組提供的專業液壓模型庫搭建。
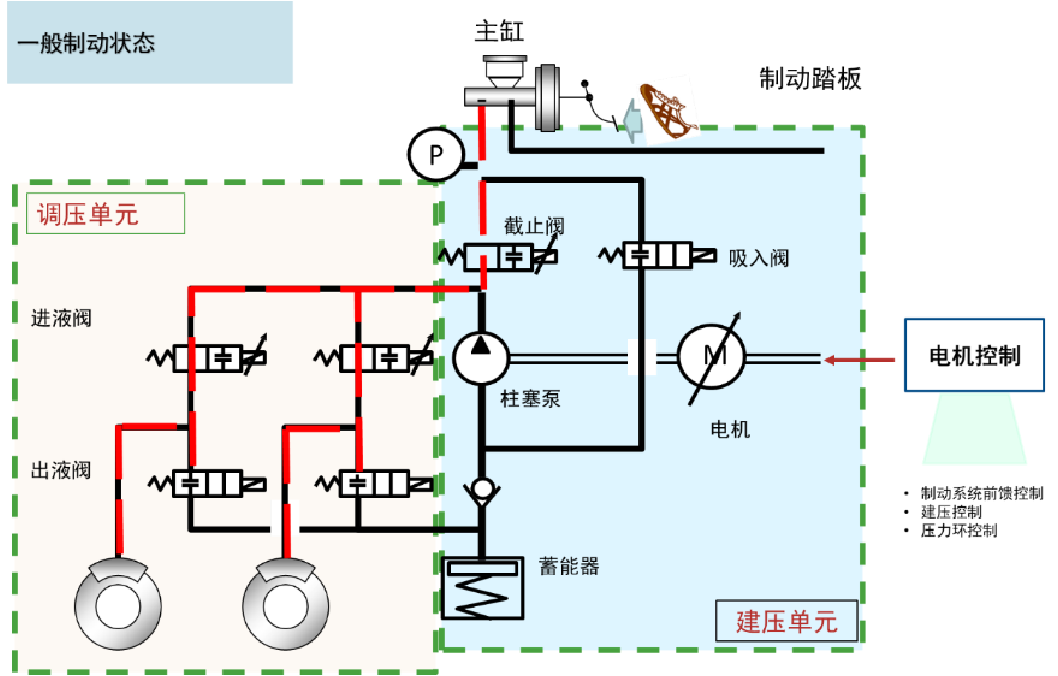
這是一個典型的 EHB 液壓系統,包含主缸系統,踏板模擬器,閥門系統,制動液壓缸,柱塞泵,電機,高壓蓄能器等。根據系統的液壓圖,我們通過 Simscape Fluids 搭建其模型。
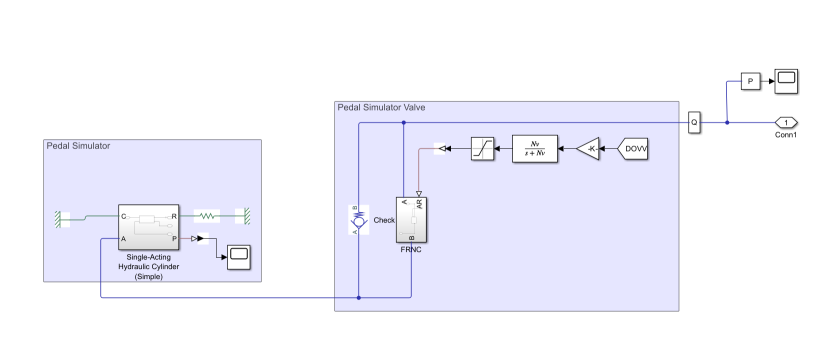
踏板模擬器系統:這可以通過一個具有彈簧和阻尼特性的簡化模型來模擬,調整參數以反映實際的踏板感覺。
電機驅動的柱塞泵供壓系統:
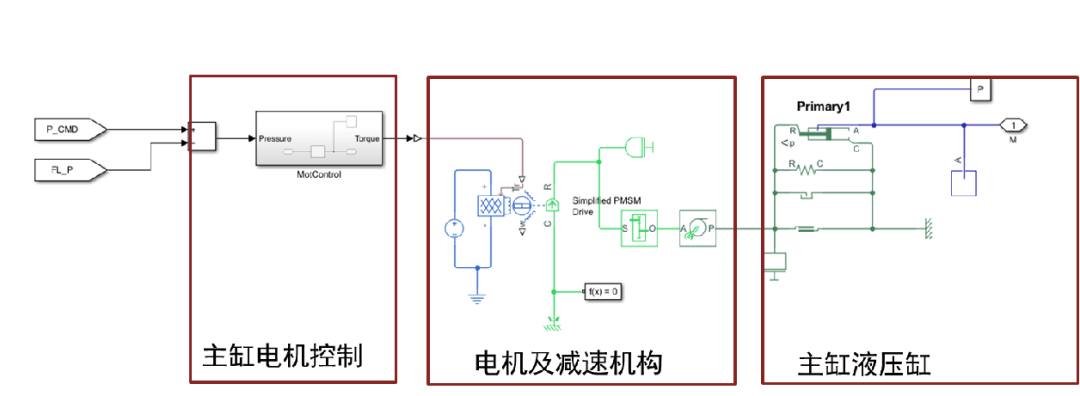
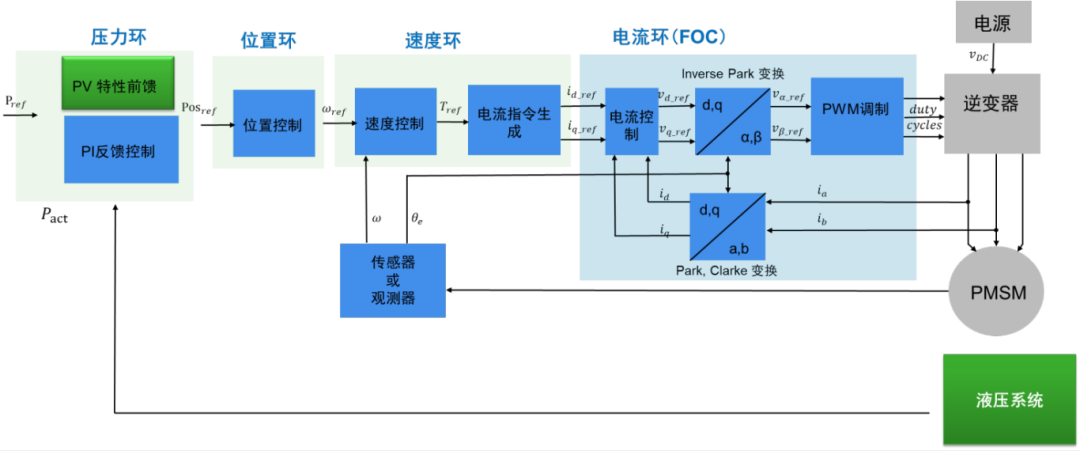
對于建壓系統的控制,主要是通過柱塞泵的電機位置來控制的。因此電機的控制算法決定了整個液壓系統的響應狀態。 集成式線控制動系統主動壓力控制主要包括兩部分:壓力環控制和電機的 FOC 控制。其中,壓力環控制,是將上層控制算法輸出的期望目標壓力f轉化為主缸活塞的目標位移 ;電機閉環控制,是控制永磁同步電機跟隨壓力環輸出的伺服缸活塞的目標位置。
在設計壓力環時,可以根據需求添加前饋補償控制等提高系統響應速度。往往這些前饋補償特性與液壓系統的設計相關,也非常影響建壓速度進而影響到制動扭矩控制的精確性。常常是需要標定的對象。
以上部分都是也有些系統的建壓單元。
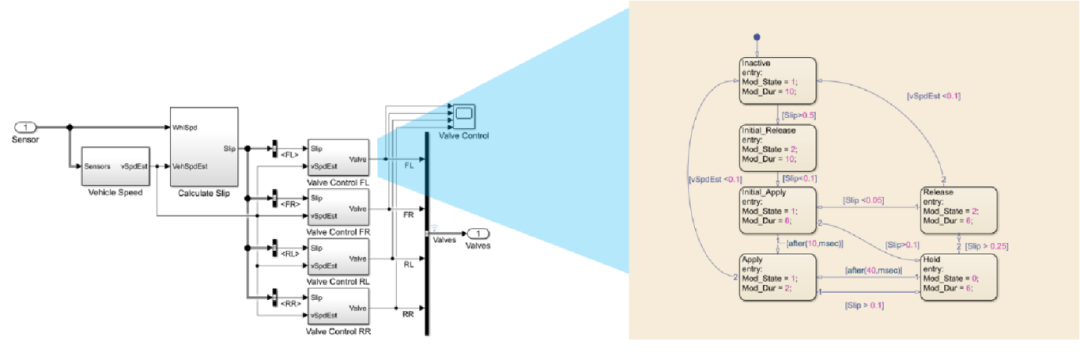
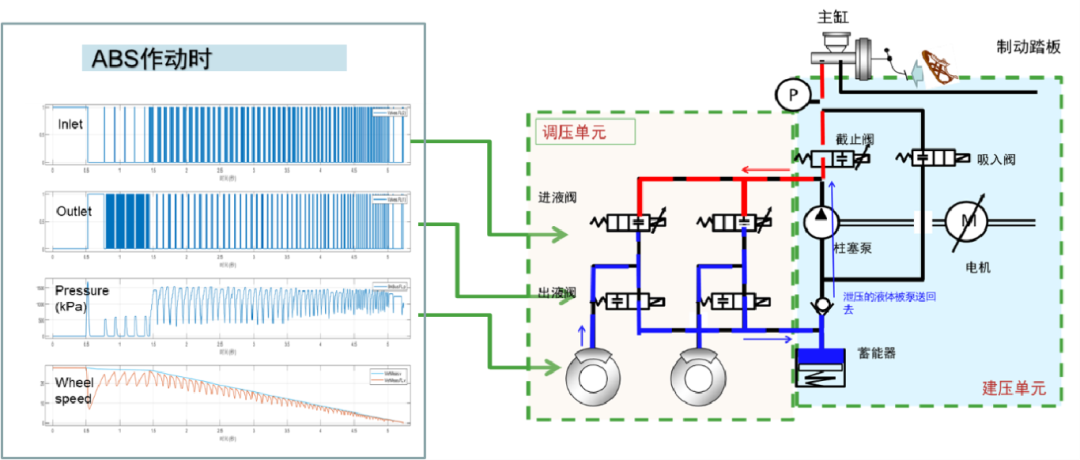
調壓單元通過調節電磁閥電流大小控制電磁閥的開閉實現制動輪缸壓力的控制。 該液壓系統中閥門開關較多。多見于在 ABS,ESC 作動情況下的實施
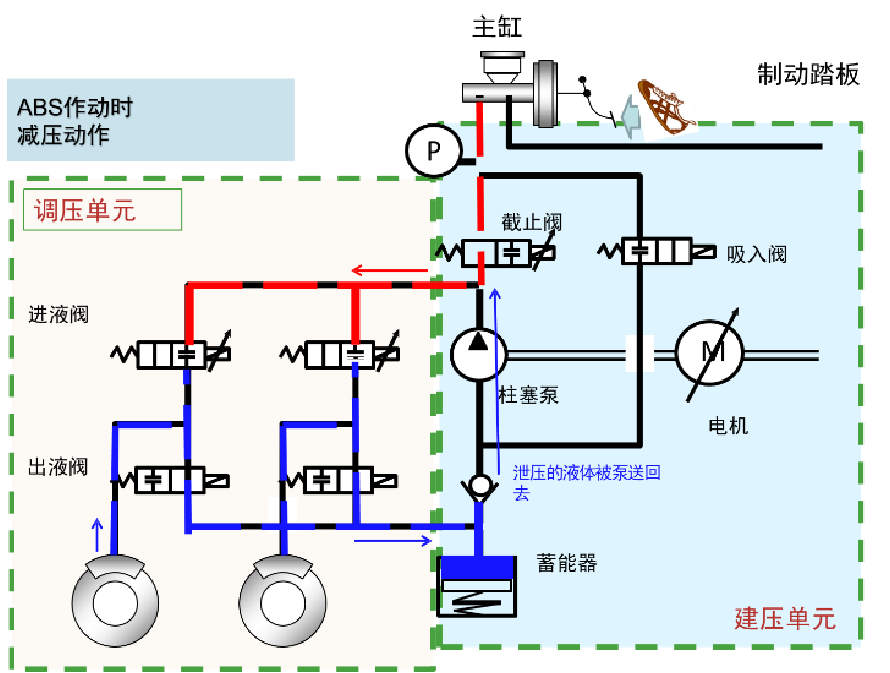
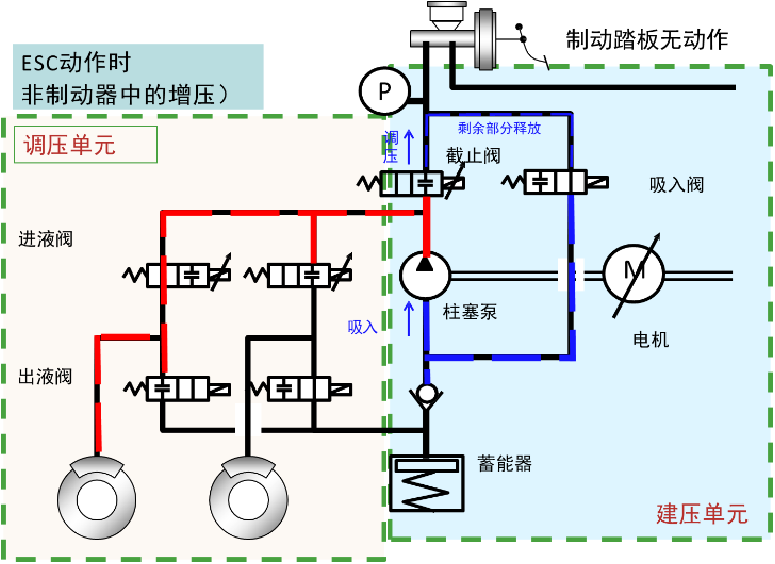
ABS 控制系統通過控制這兩個閥來控制施加在剎車片上的剎車壓力,通過兩個閥的組合,剎車可能處于加壓狀態、保壓狀態以及泄壓狀態。而至于出于什么狀態,則基于當前的車輪滑移率。 而滑移率則通過傳感器數據估算而來。 四個車輪的傳感器數據傳到控制系統,通過算法估算車速以及滑移率,然后作為輸入來計算剎車閥的控制。
這里需要說明的是,Simscape 平臺與 Simulink 平臺是無縫銜接的。Simscape 搭建的液壓系統及其他物理系統,可以方便的與 Simulink 搭建的控制策略集成。同時也可以與 Vehicle Dynamic Bloscket 搭建的整車模型無縫集成。
搭建好這樣的模型后,我們就可以通過仿真來驗證整個集成制動系統對整車性能的影響。
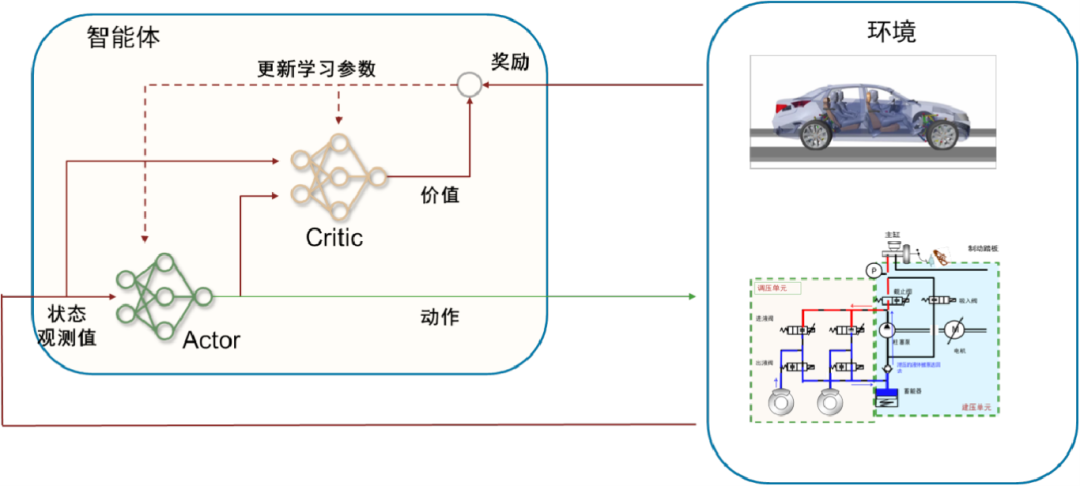
同時有了這樣整車物理模型系統,我們可以探索目前學術界和科研界正在研究的基于深度強化學習設計 ABS 控制算法。 MATLAB 提供的強化學習工具箱,可以基于 Simulink 創建的環境模型(車輛以及液壓系統模型)通過與環境交互來訓練策略和函數。Reinforcement Learning Toolbox 提供了一個 App、多個函數和一個 Simulink 模塊,可與 DQN、PPO、SAC 和 DDPG 等強化學習算法結合使用來進行策略訓練。可以使用這些策略為復雜應用(如資源分配、機器人和自主系統)實現控制器和決策算法。
審核編輯:劉清
-
matlab
+關注
關注
185文章
2976瀏覽量
230526 -
控制系統
+關注
關注
41文章
6623瀏覽量
110626 -
電池充電
+關注
關注
9文章
463瀏覽量
74291 -
電動機
+關注
關注
74文章
4110瀏覽量
96355 -
模擬器
+關注
關注
2文章
877瀏覽量
43241 -
MATLAB仿真
+關注
關注
4文章
176瀏覽量
19931
原文標題:淺談基于 MATLAB 仿真的車輛協調再生制動控制策略與集成線控制動系統開發
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何對電動汽車再生制動進行仿真?
基于MATLAB/Simulink的電動汽車再生制動仿真
什么是電動汽車再生制動能量回收控制系統
四驅電動汽車再生制動力控制策略研究
再生制動的優勢是什么

電動汽車再生制動系統回收特性與能量流分析
如何使用ECE法規進行電動汽車再生制動控制策略的建模與仿真





 工商網監
工商網監
評論