 什么是CAN的BUS-OFF,如何恢復BUS-OFF?
什么是CAN的BUS-OFF,如何恢復BUS-OFF?
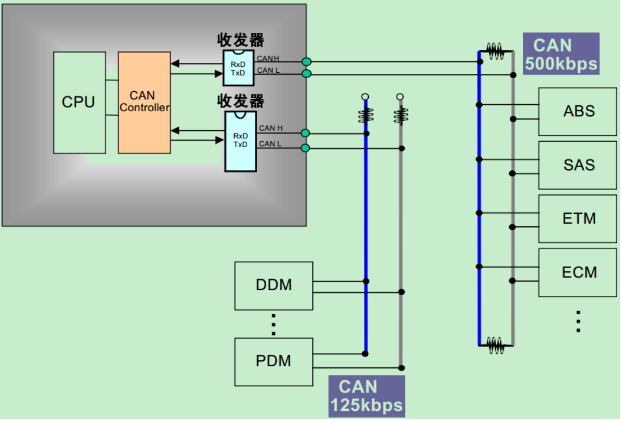
CAN作為一款強大的工業總線,其高性能和高可靠性讓其應用特別廣泛。一個小知識:汽車里面各個模塊之間的通訊就是使用CAN來實現的哦。
既然是總線,那當然會有多個設備掛載在CAN上,當一個設備在發送數據的時候,其他設備也沒有在閑著,它們會對接收到的數據格式進行解析,一旦發現有錯誤就會發送錯誤信號到總線上。
那么,如果一個設備確實出現了問題,老是發出錯誤格式的幀(比如波特率有偏差等等)怎么辦呢?嘿嘿,不等大家把它踢出局,它自己就會老老實實的退出總線,不再往總線上發數據了,這個就叫做BUS-OFF,也就是設備離線。
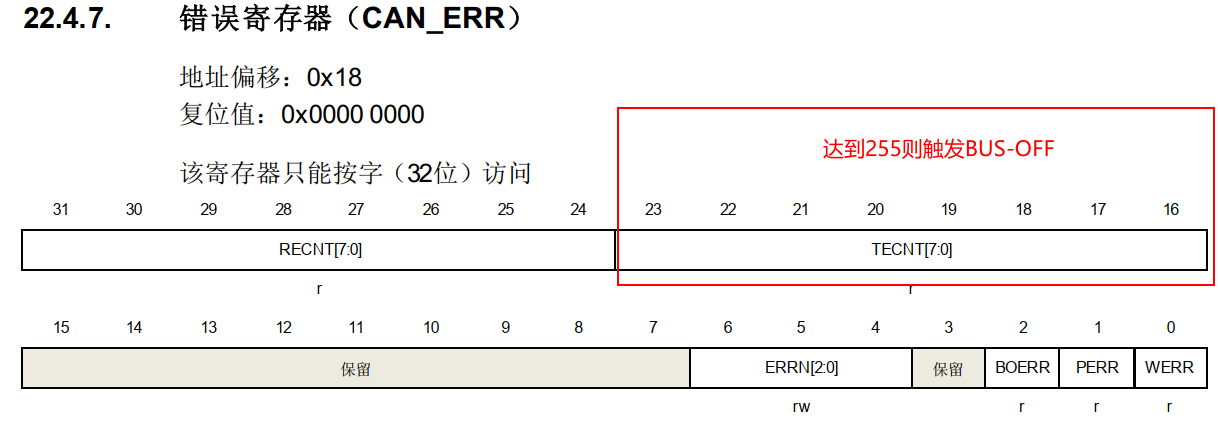
那么MCU如何觸發這個BUS-OFF呢?我們以GD32F303為例來說明。GD32F303的CAN在發送一次錯誤的幀后,會將發送錯誤計數器的值+1,當這個計數值達到255時,就會觸發BUS-OFF機制,退出總線。
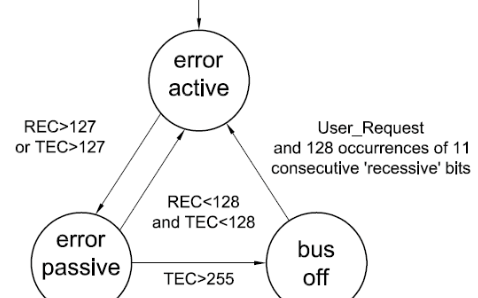
這個時候有的小伙伴就會問了,一個設備運行很長時間,總會有發送錯誤的時候吧,如果就這么退出總線了,豈不是太冤了?其實不是的,當設備在發送錯誤計數器的值不等于0的情況下,發送一次正確的幀,這個計數值會-1的。
當一個設備BUS-OFF了,但它自恢復了錯誤狀態,想繼續回到總線上怎么操作呢?有兩種方式:
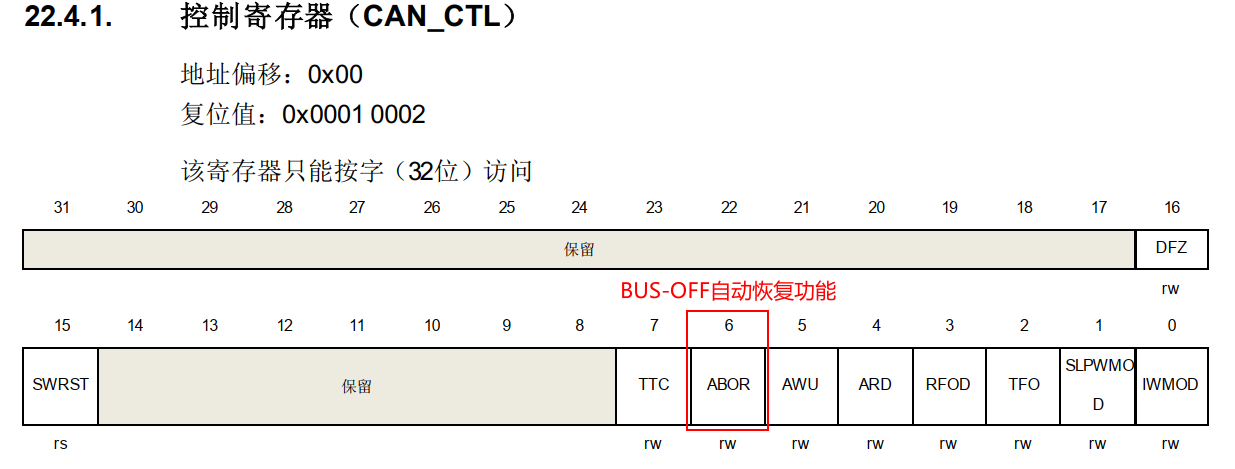
1、打開GD32F303的離線自動恢復功能,當出現BUS-OFF,MCU在檢測到離線恢復序列(在CAN_RX檢測到128次連續11個位的隱性位 )后就會自動恢復。
2、如果沒打開自動恢復功能,則需要讓CAN進入到初始化模式,再進入正常工作模式即可。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
單片機
+關注
關注
6039文章
44579瀏覽量
636444 -
嵌入式
+關注
關注
5087文章
19145瀏覽量
306121 -
CAN
+關注
關注
57文章
2757瀏覽量
463914 -
汽車業
+關注
關注
0文章
18瀏覽量
3308
發布評論請先 登錄
相關推薦
CAN控制器總線錯誤分析之CAN節點BusOff恢復過程分析與測試
“ 總線關閉(bus off)是CAN節點比較重要的錯誤處理機制。那么,在總線關閉狀態下,CAN節點的恢復流程是怎樣的?又該如何理解節點
發表于 08-04 11:16
?1.5w次閱讀
將TC397的MCMCAN模塊的canh和canl短接到GND,MCMCAN模塊進入到bus off狀態后無法繼續正常發送的原因?
將TC397的MCMCAN模塊的canh和canl短接到GND。按照網絡上的資料:此時CAN總線會進入到bus off狀態,但當故障移除后即通信線正常連接后,CAN模塊會
發表于 02-01 07:21
CYT2B75CAD CAN的bus off狀態如何檢測的?
使用芯片為:CYT2B75CAD,CAN的bus off狀態如何檢測的,CAN的錯誤以及發送完成等?是否有相關例程可以參考?
發表于 02-02 08:36

STM32之CAN---錯誤管理分析
bus-off state only upon a user request.由于錯誤界定規則,一個節點可能處于離線狀態,當處于此狀態時,這個節點既不發送也不接收。至于何時離線恢復取決于何時用戶請求。2
發表于 03-20 13:48
在總線關閉狀態下手動重啟CAN
controllers in a PSoC 4200L.The datasheet for the component says that when the Bus-off restart option
發表于 10-24 16:47
請問NUC240 CAN bus遇到bus-off如何自動恢復?
各位大大安安,我在BSP中CAN范例遇到CAN bus中斷進到bus-off狀態問題,導至message無法傳送,想問除了重新上電復位之外,如何初始化讓
發表于 08-21 06:04
CAN-BUS,CAN-BUS是什么意思
CAN-BUS,CAN-BUS是什么意思
CAN-BUS 1,CAN-BUS的起源 控制器局域網(controllerareanetwork 簡稱
發表于 03-11 15:31
?1.8w次閱讀
CAN-BUS,CAN-BUS原理是什么?
CAN-BUS,CAN-BUS原理是什么? 1,CAN-BUS的起源 控制器局域網(controllerareanetwork 簡稱CAN)最初是德國Bosch公司于1983年為汽
發表于 03-22 15:51
?2668次閱讀
CAN總線Bus Off原理及恢復解決方案
除了物理層線路因素,還有可能因為CAN控制器或收發器等元器件故障導致。同時,也有可能是由于CAN總線信號干擾導致的CAN信號收發不正確,嚴重時會導致不能正常發送報文,從而更容易導致CAN
CAN總線Bus Off原理及CAN總線Bus Off恢復的解決方案
汽車內部掛有很多的ECU節點,當其中一個節點發生故障進入總線關閉狀態時,會很大程度上影響整車CAN網絡的通訊。
發表于 01-04 11:34
?9010次閱讀





 工商網監
工商網監
評論