

**0. 引言**
三維成像激光雷達因具備主動照明、角度分辨率高、可探測距離信息等優勢,被視為是被動遙感和微波雷達后的下一代技術產品,與傳統被動傳感器成像及微波雷達相比,三維成像激光雷達具有明顯優勢,同時還具備抗干擾能力強、易于小型化等特點。非掃描式三維成像激光雷達是目前研究的熱點方向之一,其中基于偏振調制的非掃描型三維成像激光雷達(后文稱偏振成像激光雷達)具有測量范圍遠、測量精度較高、成像速度快、無運動偽像等優點,同時不受其他調制方式中增強型 CCD(ICCD)、雪崩二極管(APD)陣列探測器工藝復雜、易飽和損壞等缺點限制;但其也存在需要雙相機、成像視場角受電光晶體限制、成像質量易受到入射角度及云霧等大氣條件的影響等缺點。
針對上述問題,本文提出采用偏振成像激光雷達與短波紅外變焦光學系統共孔徑復合的方式,構建雙模目標探測成像系統,這樣既減小兩套系統的體積、解決兩套系統共軸的問題,又可以解決偏振調制成像激光雷達視場角小、成像質量受到入射角度及云霧等大氣條件影響以及短波紅外成像目標能量較低的限制。依照上述思路,開展偏振成像激光雷達與短波紅外復合光學系統設計研究,采用CodeV 軟件完成系統光學設計,并對完成系統像質分析;采用 Lighttools 軟件對光學系統成像過程、偏振成像激光雷達偏振調制成像過程仿真。結果表明所設計光學系統成像質量良好、設計正確可行。
1.系統原理
偏振成像激光雷達與短波紅外復合光學系統,其成像原理如圖 1 所示。整套系統由望遠鏡組、短波紅外成像鏡組、偏振調制鏡組、分光器件以及探測器等組成,其中望遠鏡組實現光線接收,短波紅外成像鏡組為變焦鏡頭、實現目標探測識別,偏振調制鏡組通過偏振調制實現目標測距,分光器件實現光束分光。短波紅外成像鏡組與偏振調制鏡組通過共孔徑結構方式復合,望遠鏡組為系統共孔徑部分;望遠鏡與后端的短波紅外成像鏡組、偏振調制鏡組分別構成完整折反光學系統,這樣設計使系統具備寬譜段和大口徑的特點。而共孔徑結構存在的視場遮攔問題通過離軸三反結構型式來克服。
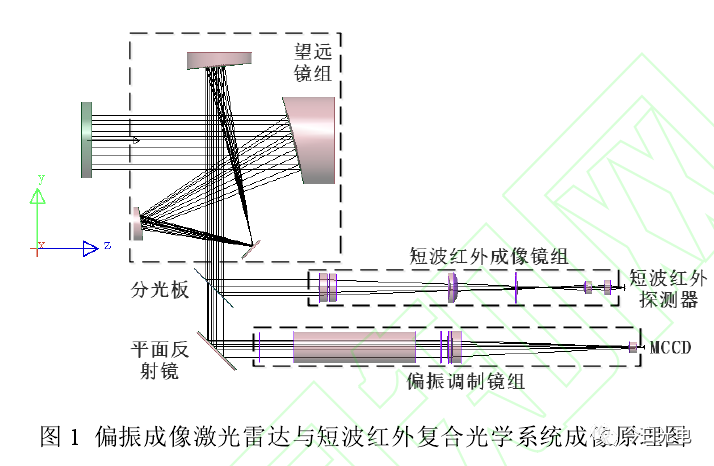
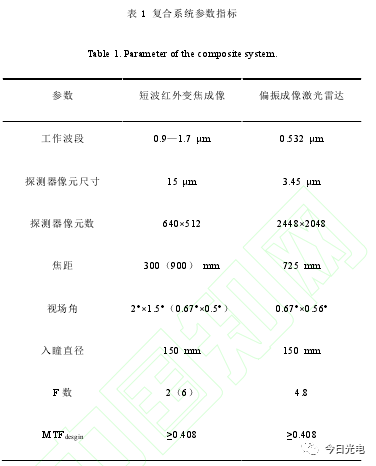
偏振成像激光測距為本系統的核心功能,其調制過程中主要使用的器件為普克爾盒,而現有普克爾盒有效利用入射光線角度最大為 1°,這使得偏振成像激光雷達視場角受限。短波紅外變焦成像系統通過移動變焦實現長短焦兩種模式切換,其中短焦模式具備較大視場,用于任務目標探測;變焦到長焦模式后具備較高分辨率,在短焦模式發現目標后用于目標識別;偏振成像激光雷達視場范圍與短波紅外系統長焦模式保持一致,在目標識別的同時完成目標測量,這樣系統就完成目標探測、目標識別和目標測量的過程。以距系統 15 km 地面物體為目標,結合系統功能計算指標參數如表 1。
2. 系統光學設計結果
系統中望遠鏡組采用離軸三反結構型式克服視場中心遮攔問題,短波紅外鏡組采用移動變倍補償組的方法來實現變焦,短波紅外探測器選擇 Sofradir 公司所生產的 SNAKE SW 型 InGaAs 探測器。偏振調制鏡組中普克爾盒選擇 FastPulse Technology 公司的 1144-50 型、分焦平面偏振相機(MCCD)選擇 LUCID vision LABS 公司的 Phoenix PHX050S-P 型偏振相機。
2.1 望遠鏡組設計結果
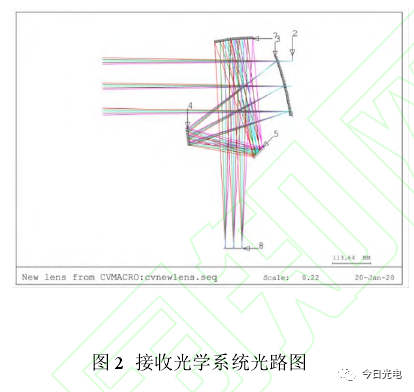
采用離孔徑的方式實現離軸,便于設計完成后的加工制造以及檢測裝調;孔徑光闌設置在主鏡上,便于整體光學設計;在次鏡和三鏡之間的中間像面處設置一面平面反射鏡來折疊光路,以減小系統的體積;同時平面反射鏡設置成為視場光闌,這樣可以起到有效減少系統雜散光的效果。其光路圖如圖 2 所示,主鏡3、次鏡 4、三鏡 7 面型均采用二次曲面,系統入瞳直徑為 150 mm,出曈直徑為50 mm,縮束比為 3 倍。
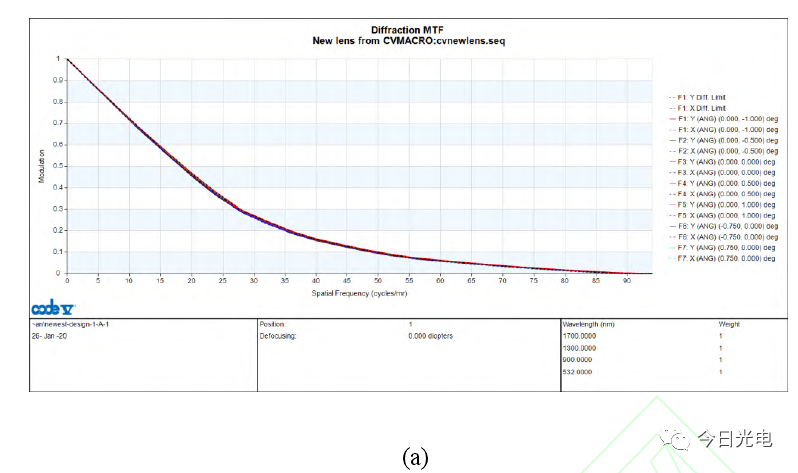
對其進行像質評價,結果如圖 3 所示,工作波段的 MTF 已經接近衍射極限,各個視場所成像斑均在艾里斑內部,光斑 RMS(均方根)直徑均小于 5 μm。分析結果表明望遠鏡組成像質量良好,光學設計滿足系統要求。

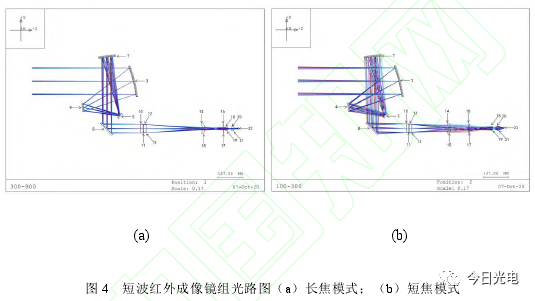
2.2 短波紅外成像鏡組設計結果
短波紅外成像鏡組與望遠鏡組合置后光路圖如圖 4 所示,短波紅外成像鏡組由前固定組(10-13 面)、變倍補償組(14-17 面)、后固定組(18-21 面)三部分 6 片鏡片組成。使用直線電機帶動變焦補償組前后移動來實現系統光學變焦,系統總長固定為 551.8454 mm,鏡片材料分別選擇 ZNSE 和 IRG26 兩種材料,其中 IRG26 為紅外硫系玻璃。
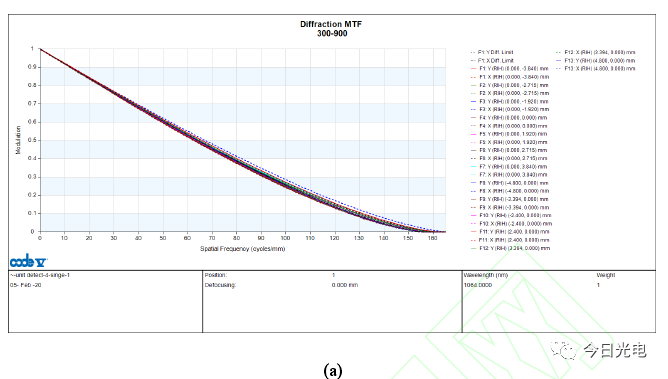
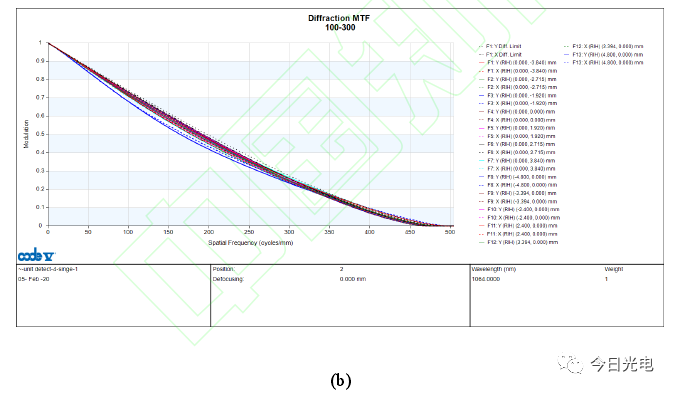
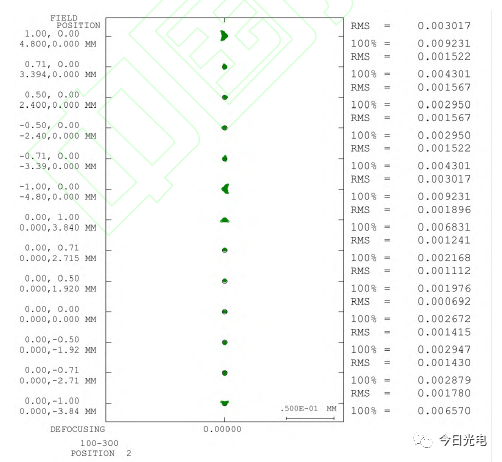
對其進行像質評價,結果如圖 5 所示,兩種焦距光學系統 MTF 曲線均接近衍射極限,系統視場光斑 RMS 直徑大小均在 3.2 μm 及 9.3 μm 以下,均小于探測器15 μm 像元大小。分析系統斯特列爾比可知,長焦模式系統斯特列爾比最小值為0.985,最大值為 0.997,都接近于 1;短焦模式系統斯特列爾比最小值為 0.850,最大值為 0.990,只有子午方向邊緣光線斯特列爾比略小,其他也接近于 1。分析結果表明短波紅外成像鏡組成像質量良好,光學設計滿足系統要求。
2.3 偏振調制鏡組設計結果
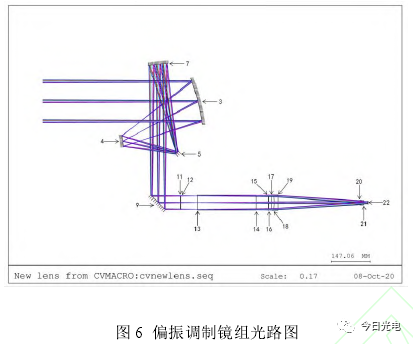
偏振調制鏡組由偏振片(P)、普克爾斯盒(PC)、四分之一波片(QWP)、成像鏡組(L)、MCCD 相機組成,MCCD 可分別在 0°,45°,90°,135°四個偏振方向成像,通過這四個偏振方向光強相互計算得出PC所引入相位延遲,進而間接算出光束飛行時間,實現并行激光測距。P,PC,QWP 使用 BK7 平板玻璃表示,L 使用成都光明生產的 HLAK1 和 HZF6 兩種玻璃材料,光闌設置在 PC 第 1 面上,與望遠鏡組合置后光路圖如圖 6 所示。同樣使用前述的 MTF、點列圖等方法對其像質分析可知,各視場 MTF 均接近衍射極限,光斑均在艾里斑內、RMS 半徑大小均在 0.002 mm 以下,均小于探測器 3.45 μm 像元大小。同樣光學設計滿足系統要求。
3. 結果分析
3.1 公差分析
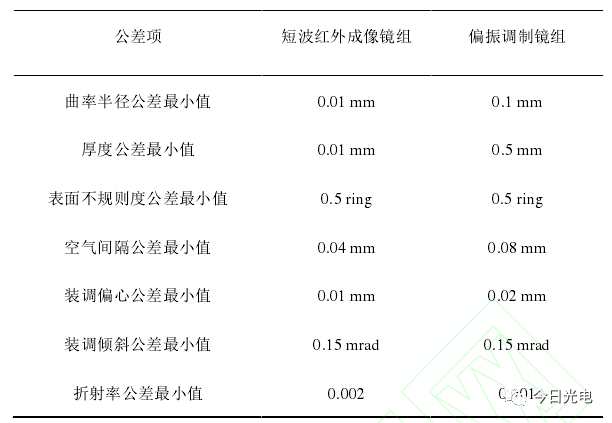
對 2.2 節和 2.3 節中所設計光學系統(已經與 2.1 節所設計望遠鏡組合置成一套系統,共孔徑部分公差分配值保持一致)進行公差分析,將望遠鏡的主鏡表面 α 傾斜與成像像面位置作為補償器,主鏡補償范圍為±0.002 rad,成像像面補償范圍為±0.5 mm,使用復色 MTF 公差標準反向靈敏度計算,分別在空間頻率33 和 50 lp/mm 處所有視場及所有變焦范圍內進行分析。經過反復調整分析,系統參數公差值部分如表 2 所示,由公差結果可得,大部分公差在工業級范圍內,只有少數公差在精確級公差范圍內,說明系統整體屬于較易加工裝調的范圍。

3.2 成像仿真分析
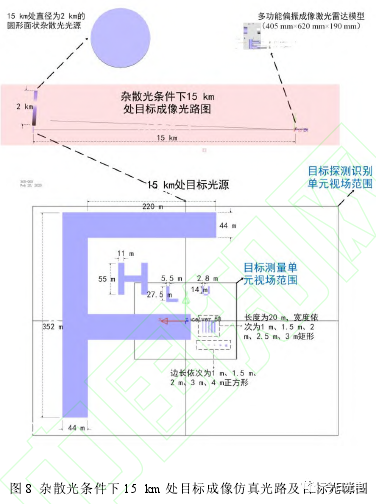
如圖 7 所示,根據前面光學設計結果,使用 Lighttools 軟件建立系統仿真模型,其中偏振器件 P,PC,QWP 按調制原理分別設置為線性起偏器、旋轉 45°線性延遲片、旋轉 0°線性延遲片。如圖 8 所示,在距模型進光口 15 km 的系統視場范圍內設置待測光源,以仿真不同形狀目標物體在系統中成像過程,在視場范圍外設置有雜散光光源,以仿真視場范圍外雜散光。
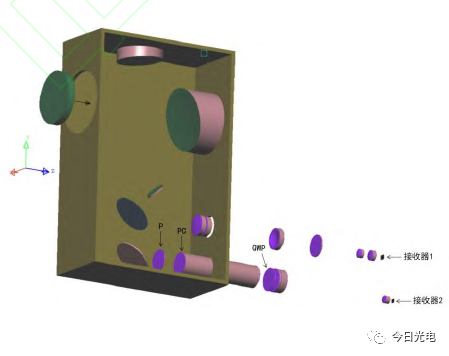
圖 7 系統 Lighttools 仿真模型圖
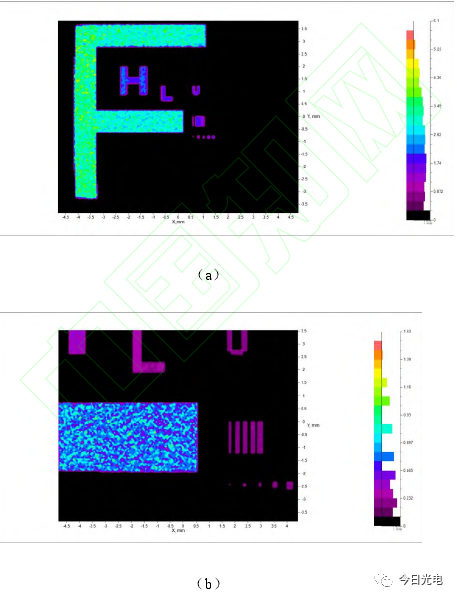
通過對 10^7條光線追跡,相對光線功率閾值設置為 10^-12,在雜散光條件下,正向模擬完成系統成像仿真過程,成像結果如圖 9 所示。由分析可知,視場范圍內,雜散光較少,可以忽略;短波紅外短焦模式時,目標探測識別單元邊緣視場存在少量畸變,畸變量小于 5%,目標邊緣成像清晰;能分辨直徑 1 m 的獨立正方形目標,當形狀相似的目標之間距離小于 3.25 m 時,系統無法完全區分。短波紅外長焦模式時,視場范圍內成像畸變較小,目標邊緣成像清晰,能分辨直徑1 m 的獨立正方形目標,當形狀相似的目標之間距離為 2.25 m 時,系統依然可以進行區分,而偏振成像激光雷達與短波紅外長焦模式成像視場范圍、成像質量與目標探測識別單元長焦成像基本一致。整體來說,系統成像質量較好。
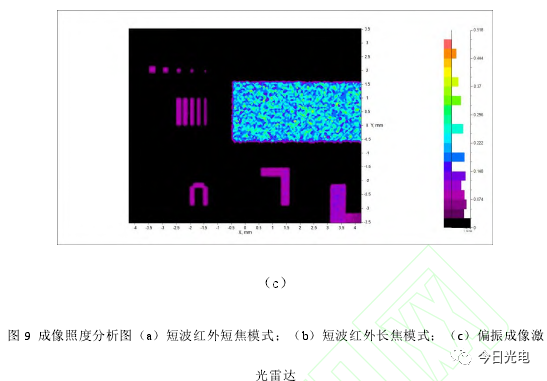
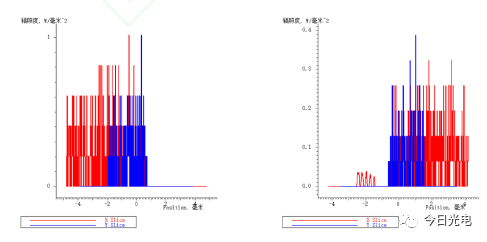
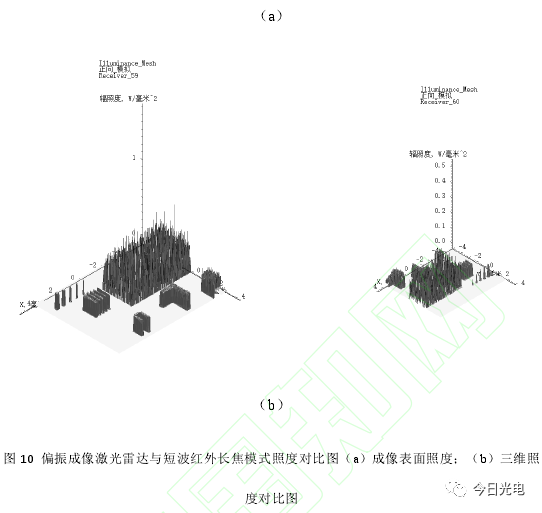
將偏振成像激光雷達與短波紅外長焦模式成像結果比較,如圖 10 所示,偏振成像激光雷達接收照度值約為短波紅外長焦模式下的 2.4 倍,且偏振成像激光雷達整體能量分布更加均衡。
4. 總結
本文針對基于偏振調制的非掃描型三維成像激光雷達存在需要雙相機、成像視場角受電光晶體限制、成像質量易受到入射角度及云霧等大氣條件的影響等缺點,提出采用偏振成像激光雷達與短波紅外變焦光學系統通過共孔徑的方式,來復合構建雙模目標探測成像系統。采用 CodeV 軟件完成望遠鏡組、短波紅外成像鏡組、偏振調制鏡組及系統整體光學設計,并對完成系統像質分析,可知所設計光學系統成像質量良好,光學設計滿足系統設計要求。使用 Lighttools 軟件對光學系統成像過程進行仿真,由結果可知偏振成像激光雷達及短波紅外成像質量均較好,雜散光對系統成像影響很小,目標邊緣成像清晰,均能分辨直徑 1 m 的獨立正方形目標;短波紅外短焦模式視場范圍為其長焦模式的 9 倍;短波紅外長焦模式與偏振成像激光雷達視場范圍基本一致;偏振成像激光雷達接收照度值約為短波紅外長焦模式下的 2.4 倍,且偏振成像激光雷達整體能量分布更加均衡,成像效果更佳。
審核編輯:劉清
-
CCD
+關注
關注
32文章
889瀏覽量
143452 -
探測器
+關注
關注
14文章
2688瀏覽量
73973 -
雪崩二極管
+關注
關注
2文章
54瀏覽量
12965 -
RMS
+關注
關注
2文章
148瀏覽量
36366 -
激光雷達
+關注
關注
970文章
4145瀏覽量
191536
發布評論請先 登錄
相關推薦





 工商網監
工商網監

評論