

近日,中國科學院上海微系統與信息技術研究所李嘉茂研究員的研究團隊在無人系統視-慣多傳感器校準方面取得了重要進展。研究團隊通過模擬人體視覺與前庭覺,成功提出一種基于流形傳播模型的多傳感器校準方法,并在基于視覺慣性里程計(Visual-Inertial Odometry, VIO)的無人車定位導航應用上完成了驗證。相關成果以題目為“Fast Extrinsic Calibration for Multiple Inertial Measurement Units in Visual-Inertial System”的學術論文發表在機器人領域頂會ICRA(The 23RD International Conference on Robotics and Automation)上。
類人多感官的多傳感融合是智能無人系統感知環境、完成決策的重要手段。其中,通過多傳感器校準獲取傳感器間的外部相對關系,是保障后續多傳感數據融合準確、有效的基本前提。多視覺傳感器和多慣性傳感器(IMU)融合是無人系統自主定位導航應用的主流方案之一,其現有校準方法需要基于精準的傳感器運動軌跡,高度依賴外部傳感器,并易受到環境條件與觀測噪聲的影響。
針對以上問題,研究團隊提出了流形傳播模型校準方法,通過建立兩個非線性截斷最小二乘問題來分別估計多IMU的相對平移和旋轉,利用推導虛擬IMU算法的通用表達在流形上的傳播方程,在不依賴外部傳感器的條件下,解決了多視覺與多IMU標定的不穩定問題。研究團隊將本方法應用于無人車定位導航系統,并在辦公室、走廊、室外、車庫等真實場景進行了功能驗證,速度、準確性和穩健性方面優于SOTA方法。同時,模擬實驗表明本方法在僅融合2個IMU預測運動時,其精度可以與9個IMU的效果相媲美。本方法具有良好的可擴展性,支持集成到其他IMU融合算法、VIO和激光雷達慣性里程計(LIO)系統。
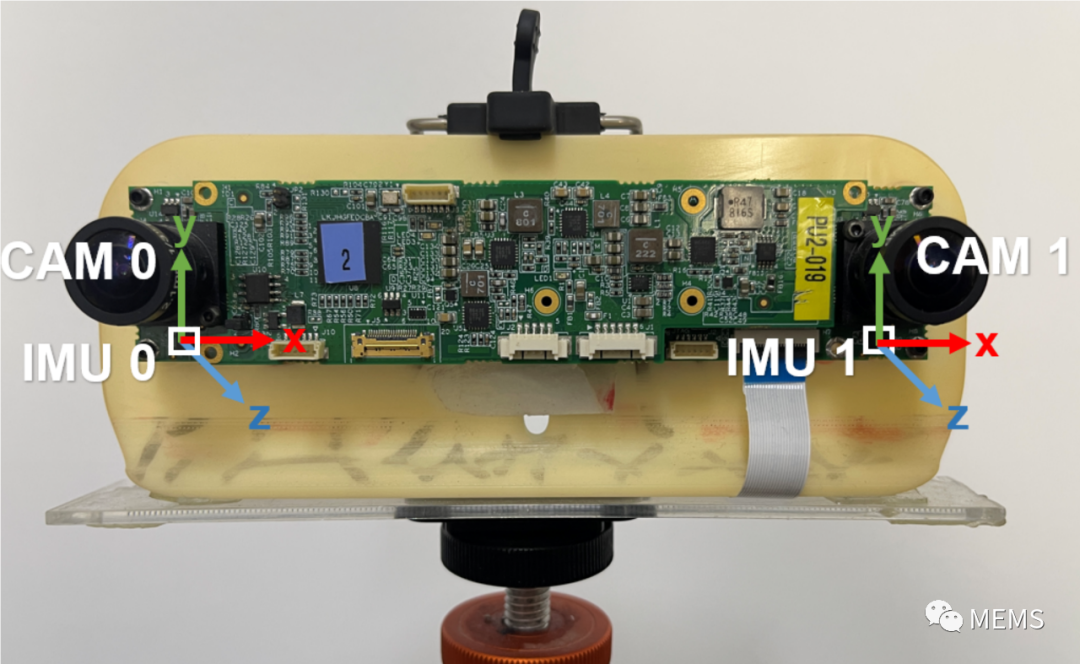
圖1:多傳感融合原型系統
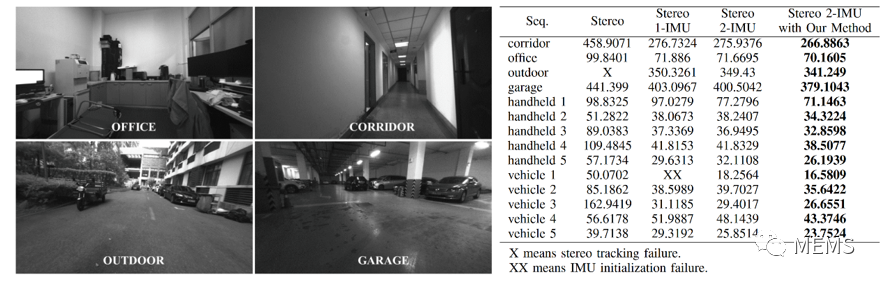
圖2:在多場景視慣定位中基于本方法的雙視覺雙IMU方案均取得最優性能
上海微系統所于有為工程師為該工作的第一作者,李嘉茂研究員為通訊作者。上述研究工作獲得科技部科技創新2030、國家自然科學基金、上海市級重大專項、上海市優秀學術帶頭人、中科院青促會項目等支持。
-
機器人
+關注
關注
212文章
28895瀏覽量
209562 -
傳感
+關注
關注
1文章
112瀏覽量
31637 -
無人系統
+關注
關注
0文章
35瀏覽量
3258
原文標題:上海微系統所在無人系統的多傳感融合技術方面取得進展
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
上海光機所在高能量深紫外激光研究方面取得進展
上海光機所在n型β-Ga2O3單晶光電性能調控方面取得進展
上海光機所在集成化高重頻太赫茲光源研究方面取得進展
上海光機所在皮秒激光器精密光同步研究方面取得新進展
上海光機所在激光燒蝕波紋的調制機理研究中取得新進展
上海光機所在二氧化釩連續激光相變研究方面取得進展
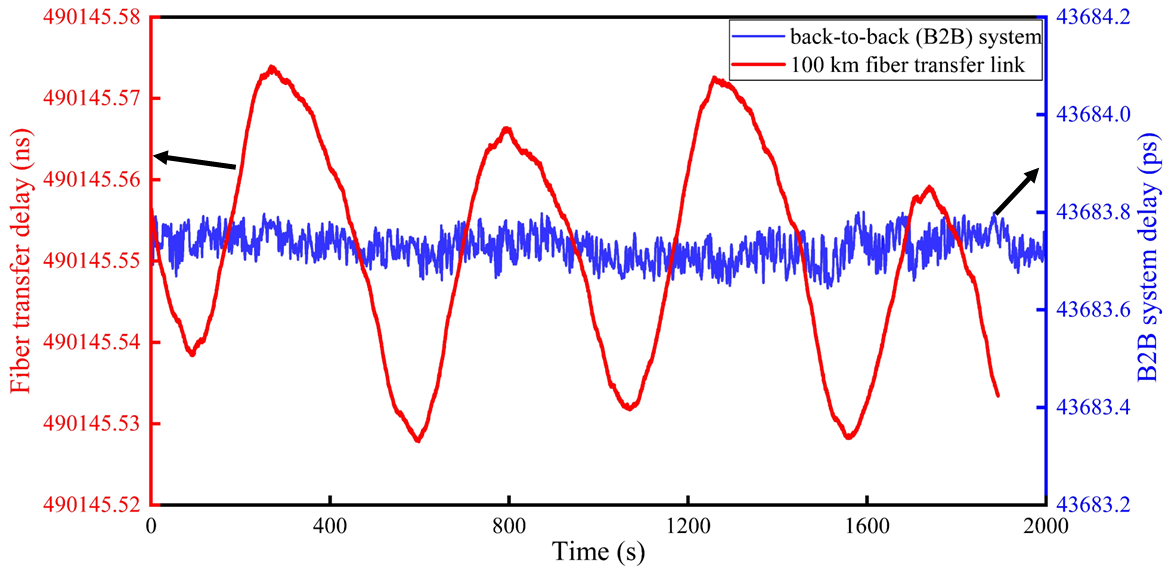
上海光機所在基于激光時頻同步的精密測量方面取得進展
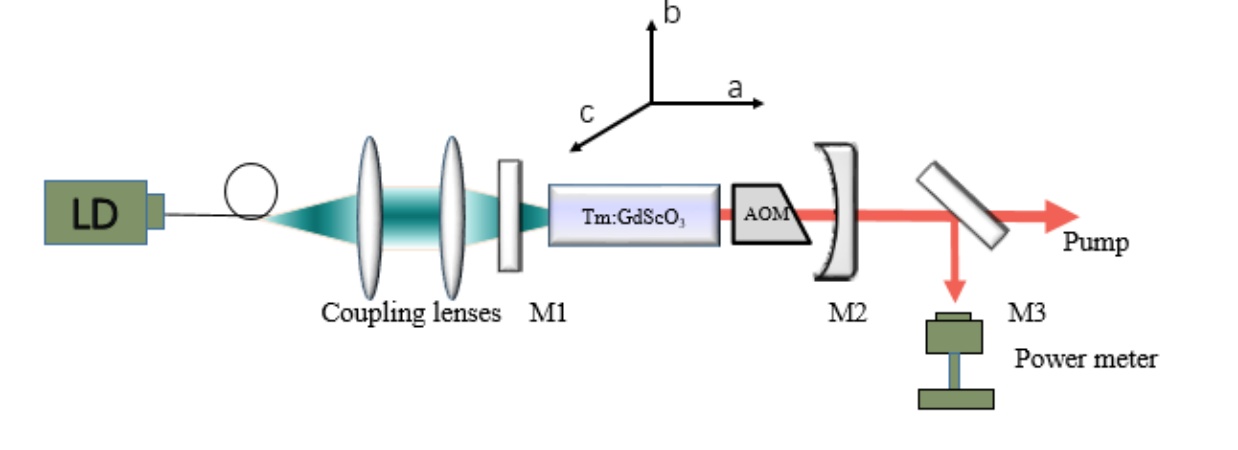
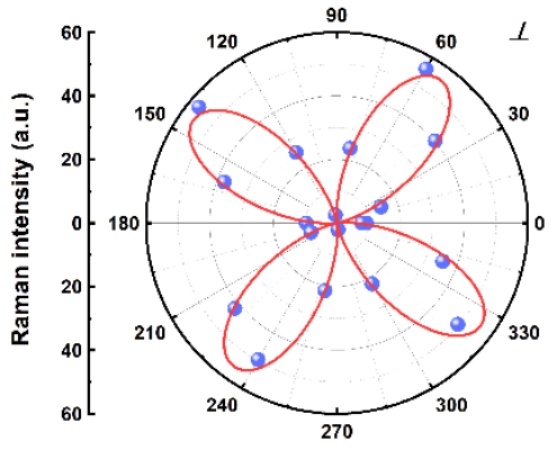
上海光機所在摻銩鈧酸釓脈沖激光研究方面取得進展
上海光機所在二維材料偏振光電探測器研究方面取得進展
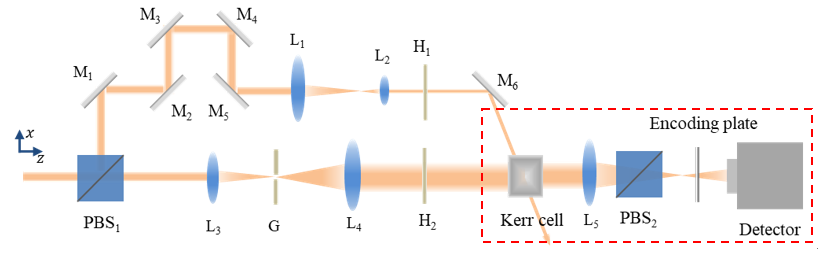
上海光機所在多路超短脈沖時空同步測量方面取得研究進展
上海光機所在重頻和波長靈活的飛秒脈沖激光產生方面取得進展
射頻微系統關鍵技術進展及展望


上海微系統所在硅基磷化銦異質集成片上光源方面取得重要進展






 工商網監
工商網監

評論