 研究人員開發柔軟的人造感覺皮膚 可在大范圍內準確確定物體的順應性
研究人員開發柔軟的人造感覺皮膚 可在大范圍內準確確定物體的順應性
人類皮膚非常復雜,包含一系列受體,通過觸覺為我們提供有關環境的詳細感官信息。其中一個獨特功能是通過將來自皮膚受體的感覺信號與動覺反饋相結合,以感知物體的順應性(即物體在壓力下的變形能力)或柔軟度。這使我們能夠探知物體的特性,并執行醫療觸診等精細的任務。
相比之下,由于機器人的剛性結構,為其配備類似的觸覺感知功能已被證明極具挑戰性。
據麥姆斯咨詢報道,瑞士洛桑理工學院(EPFL)的研究人員開發了一種柔軟的人造感覺皮膚,能夠在大范圍內準確確定物體的順應性。該研究成果已經以“Liquid Metal-Based Sensor Skin Enabling Haptic Perception of Softness”為題發表于Advanced Functional Materials期刊。
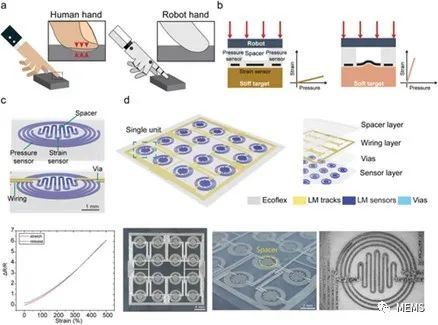
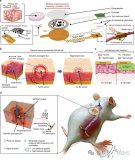
該研究所提出的傳感器示意圖
EPFL軟生物電子接口實驗室負責人、該研究負責人Stephanie Lacour解釋道:“我們的目標是通過結合多模態軟應變和壓力傳感器來模擬人類對柔軟度的感知。其關鍵創新是解決軟傳感器和觸摸物體之間的相互作用,這會影響傳感器的響應。”
這種人造感覺皮膚由一層薄彈性體膜組成,其中嵌入了由液態金屬微支架制成的電阻式壓力和應變傳感器。這些微小的液態金屬“靜脈”保持流動性,能夠在不限制傳感器的情況下發生較大的變形。其設計將螺旋圖案的壓力傳感器與沿內部曲折路徑的應變傳感器相結合。這種緊湊的設計,是通過將液態金屬噴涂到膜的兩側并利用它在層之間形成垂直通孔來實現的。
傳感器單元的表征
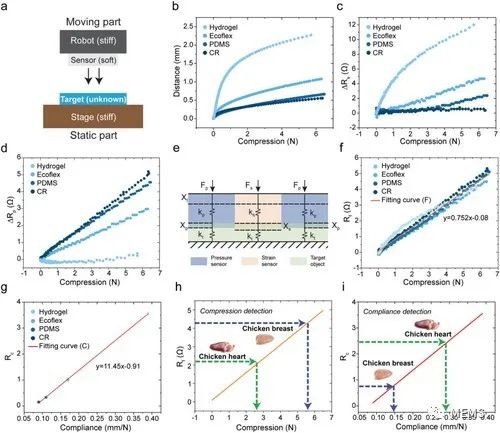
通過有限元建模,研究人員確定了物體相對于傳感器的柔軟度會影響其變形并改變傳感器的輸出。他們導出了一個分析模型,根據應變傳感器數據來校準壓力傳感器,無論目標物體的性質如何,都可以準確計算順應性。
這種人造感覺皮膚成功區分了橡膠、硅膠、水凝膠等材料以及雞心和胸脯組織的順應性。研究團隊制作了一個4 x 4傳感器陣列來測繪表面的一致性。這記錄了物體的位置、接觸面積和局部軟/硬區域。這項技術可以幫助醫療機器人和先進假肢實現精密的傳感任務。
Lacour解釋稱:“傳統的剛性機器人變形非常小,因此檢測表面變化受限。我們開發的這種人造皮膚可以像人類皮膚一樣明顯變形,通過協同多模態傳感器實現高分辨率觸覺感知。”
這項研究強調了傳感器與物體的相互作用在軟機器人和電子器件中的重要性,其中,觸摸的材料會極大地影響響應。雖然目前的實驗僅應用在相對簡單的形狀,但其基本方法可以擴展到更復雜的表面。
為機器人和假肢配備類似人類的觸覺感知可以實現更智能、更靈巧的操作和交互。這種人造皮膚模仿了人類的柔軟度感知,有望幫助實現觸診等精細的醫療操作,提高假肢裝置的精度,并增強人機協作。
審核編輯:彭菁
-
傳感器
+關注
關注
2551文章
51134瀏覽量
753820 -
機器人
+關注
關注
211文章
28445瀏覽量
207198 -
接口
+關注
關注
33文章
8611瀏覽量
151230
原文標題:基于液態金屬的人造皮膚傳感器,模擬人類的柔軟度觸覺感知
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
ad7124上電開啟診斷結果,顯示LDO不在范圍內,是哪里出錯了?
ADS1230怎么處理才能使信號在芯片量程范圍內?
有沒有推薦的方法或流程來校準AD7793,確保在100度到200度之間的測量準確?
柔軟可拉伸的新型3D打印材料可改善可穿戴傳感應用
如何確定時間繼電器的延時范圍
搞定電源完整性,不如先研究PDN!
如何在10uV誤差允許范圍內輸出最低至幾十微伏uV的交流方波信號?
一種可實現穩定壓力傳感的新型可拉伸電子皮膚
研究人員開發出高性能p型非晶氧化物半導體
Microsoft Copilot for Security(國際版)將于4月1日在全球范圍內正式發布
接近傳感電子皮膚研究進展綜述
全植入無線觸覺系統:仿生人造皮膚在傷口愈合與觸覺恢復中的應用





 工商網監
工商網監
評論