 【科普】干貨!帶你從0了解移動機器人(六) (底盤結構類型)
【科普】干貨!帶你從0了解移動機器人(六) (底盤結構類型)
不同移動機器人有著不同的構型,不同構型會帶來性能上的差異,性能上的差異決定了其應用的場景。本文主要從本體構型及輪子等方面對常見移動機器人底盤結構進行介紹分析。
1、單舵輪
單舵輪結構是最簡單的底盤結構之一,其底盤結構由1個舵輪、 2個定向輪組成,在叉車上面有著非常廣泛的應用。單舵輪底盤結構可以直接適應各種地面,保證驅動舵輪一定著地。結構簡單、成本低,由于是單輪驅動,無需考慮電機配合問題,適用于廣泛的環境和場合。

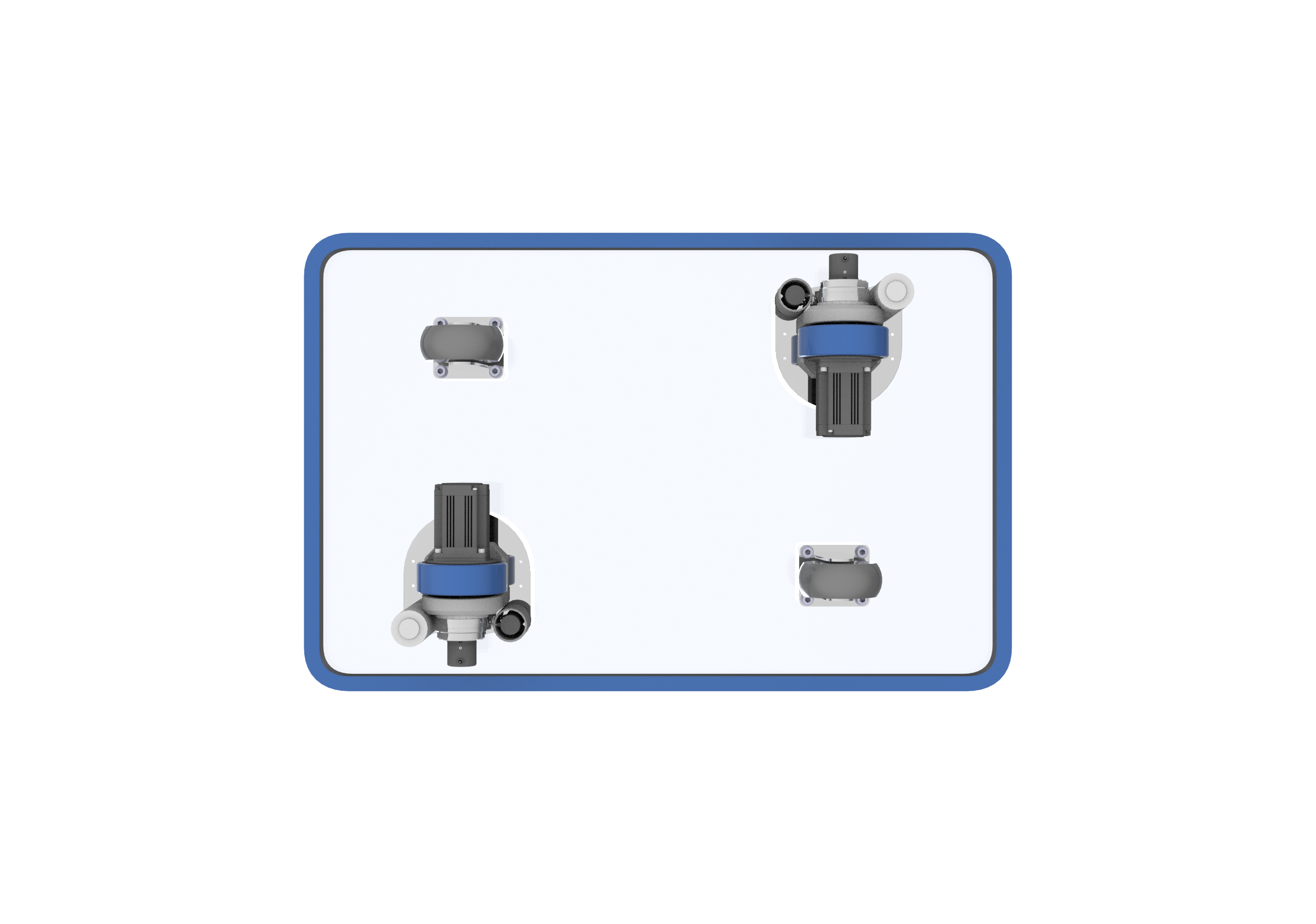
2、雙舵輪底盤
雙舵輪底盤結構是目前市場上最常見的結構之一,其底盤由兩個驅動輪和一個或多個非驅動輪組成,通常應用于中等載重的AGV上。雙舵輪底盤結構設計可以實現360°回轉功能,也可以實現萬向橫移,靈活性高且具有精確的運行精度,因此在市場上得到了廣泛應用。

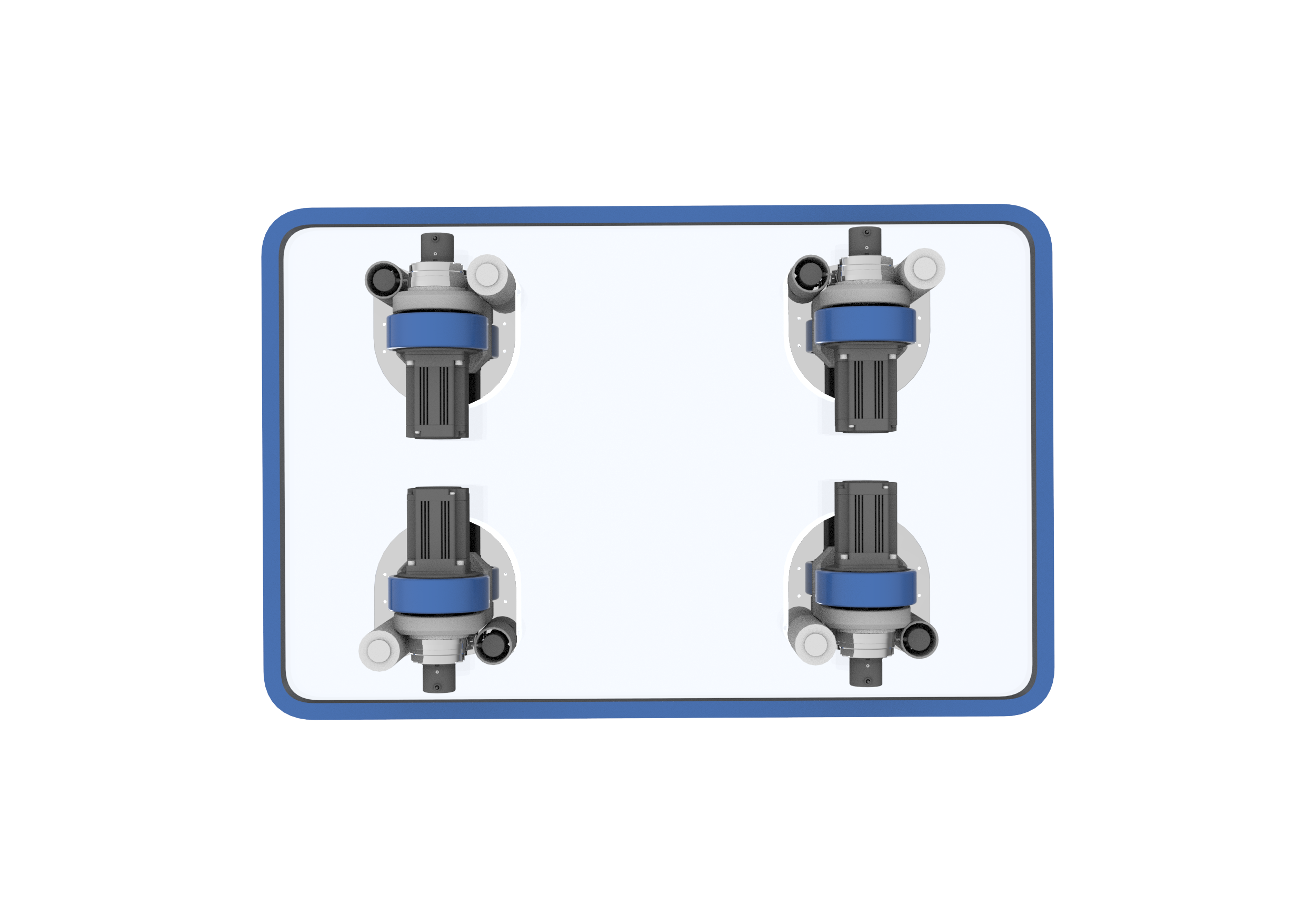
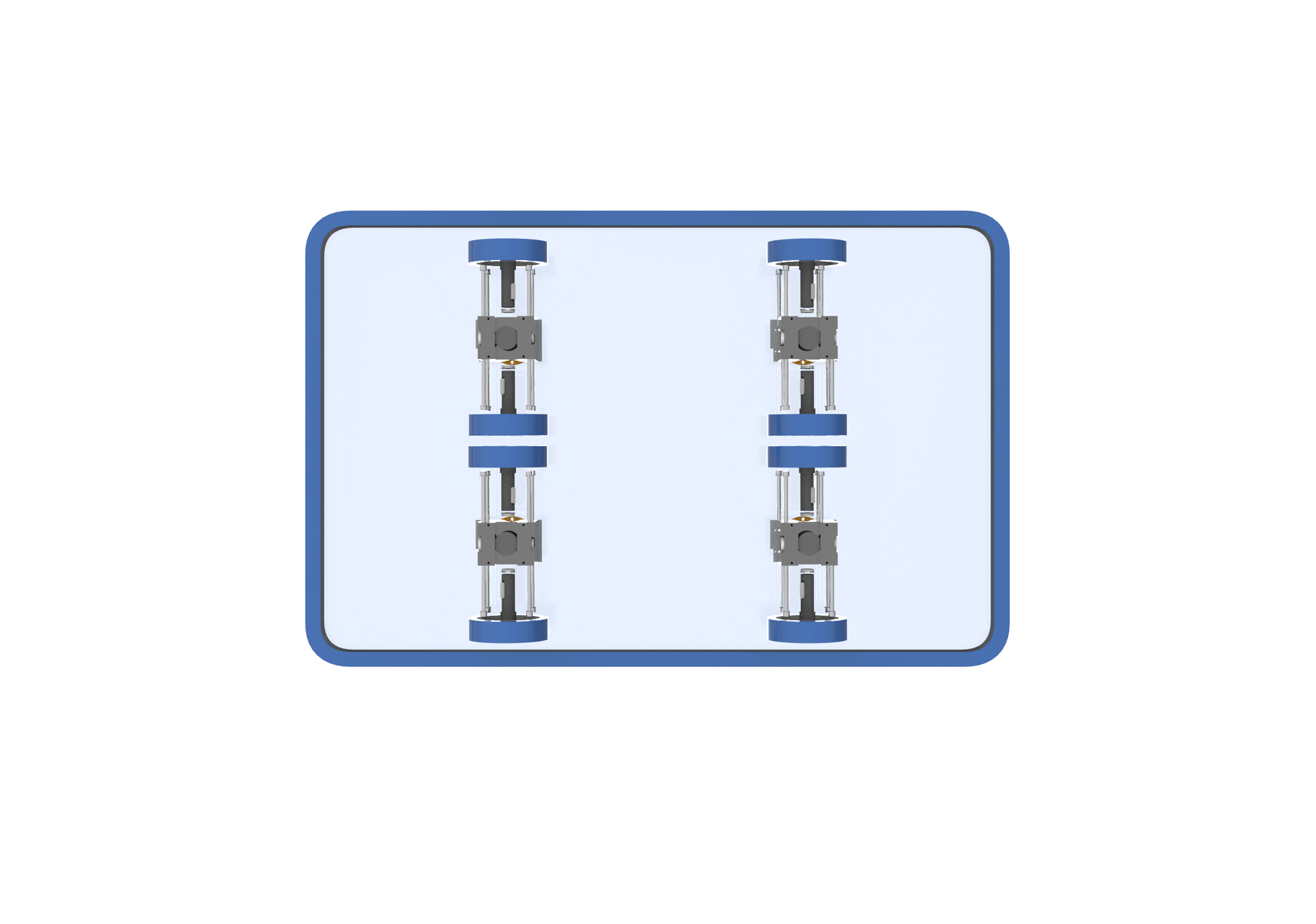
3、四舵輪底盤
四舵輪底盤結構是通過4個舵輪的轉角及速度實現AGV的橫向、斜向和原地旋轉運動,成為了近年來重載移動機器人領域的研究熱點。采用四舵輪底盤結構的AGV可以同時滿足狹窄工作空間下的靈活性要求和車間復雜路面條件下的適用性要求,但由于其底盤結構復雜,使其在路徑跟蹤過程中存在不穩定的現象,不利于實際生產中的應用。
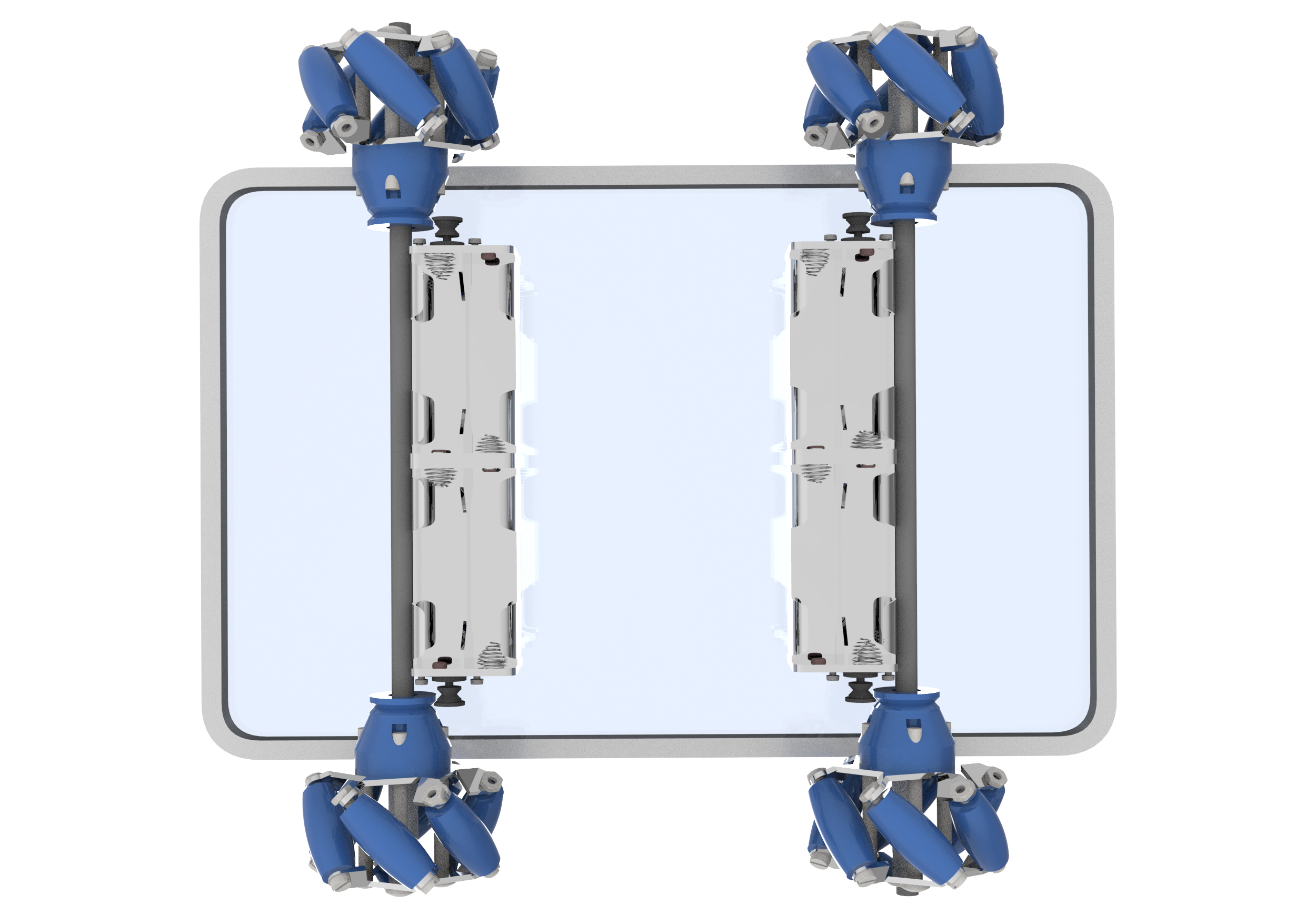
4、麥克納姆輪底盤
麥克納姆輪是一種結構特殊的全向輪。近年來,基于麥克納姆輪的全方位式移動AGV也開始逐步走進人們的視野,在一些特殊應用場景發揮著作用。相比于萬向輪,麥克納姆輪具有靈活、精確、高效的特點,是一種可以控制的萬向輪。而基于麥克納姆輪的AGV與一般AGV相比其最大的特點也在于其運轉靈活、占用空間小。
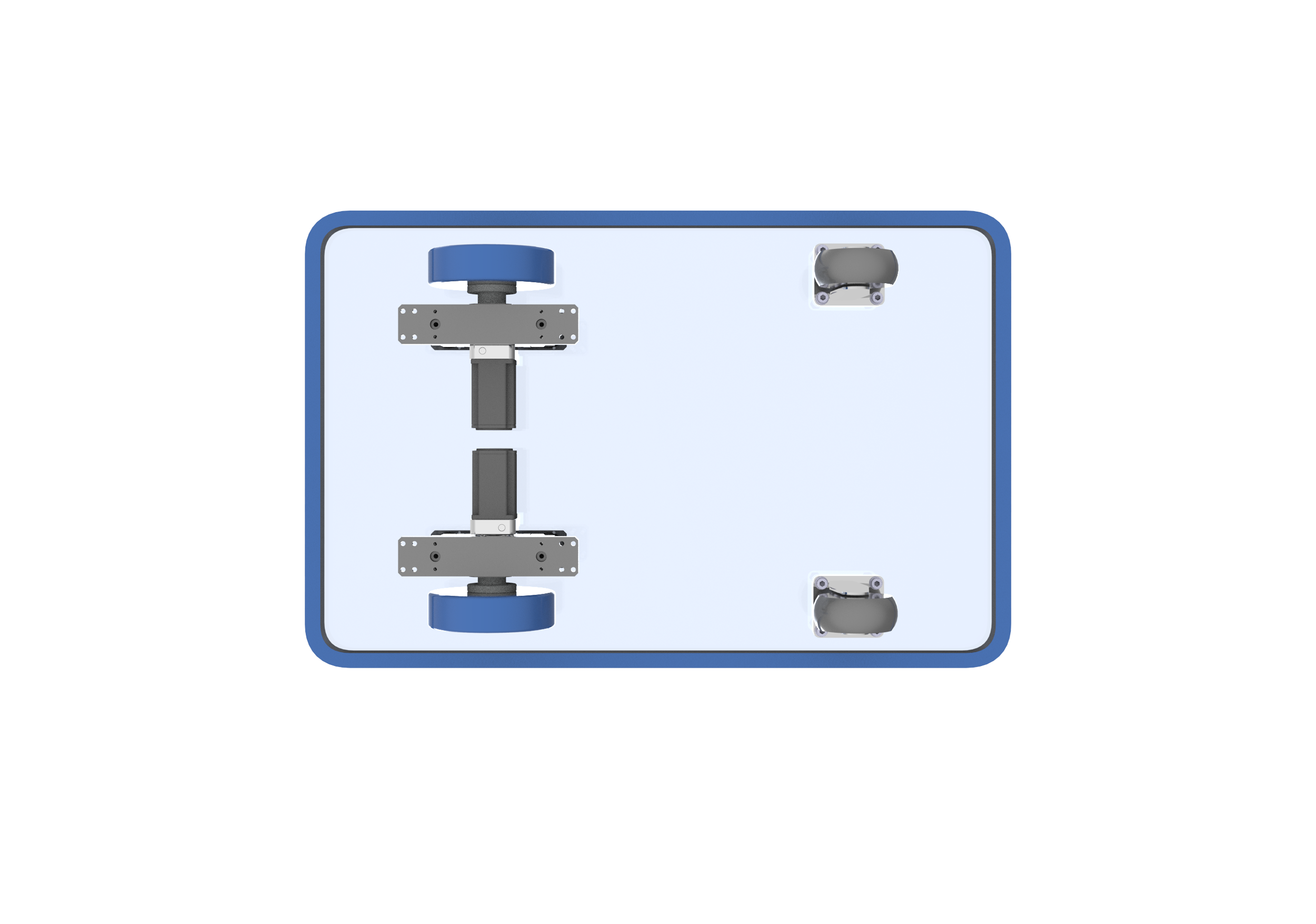
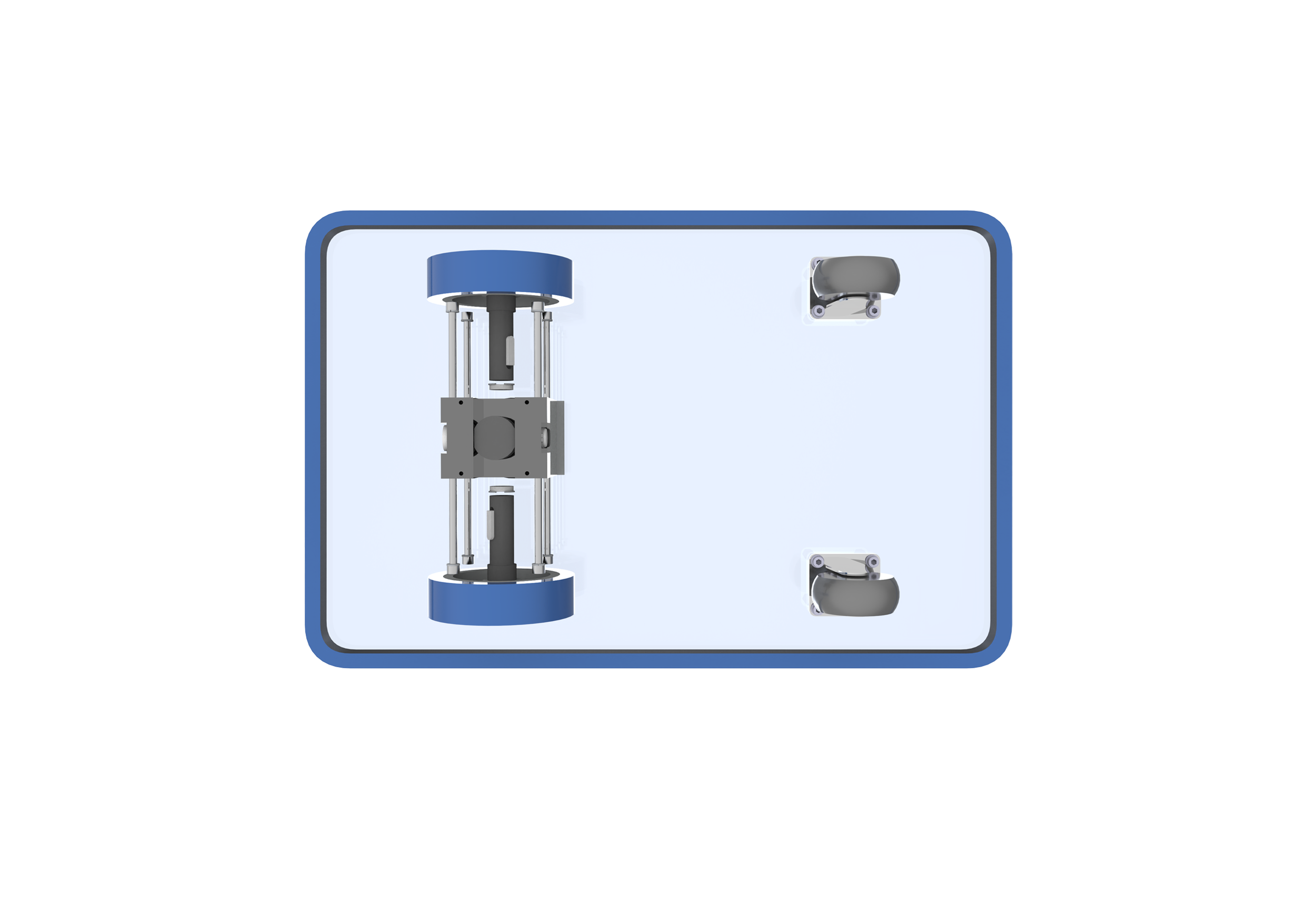
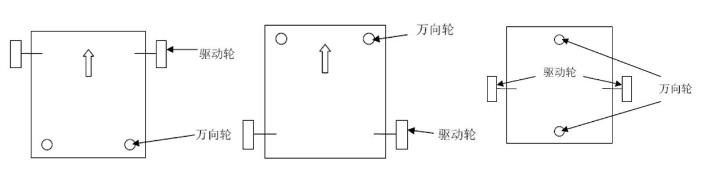
5、兩驅差速底盤
兩驅差速底盤結構由兩個差速輪作為驅動輪和隨動輪組成。在自動運行狀態下該底盤小車能做前進、后退行駛并能垂直轉彎。和舵輪驅動的四輪行走機構小車相比,該車型由于省去了舵輪,不僅可以還能節省空間,小車可以做的更小些,因此常用于潛伏式AMR。
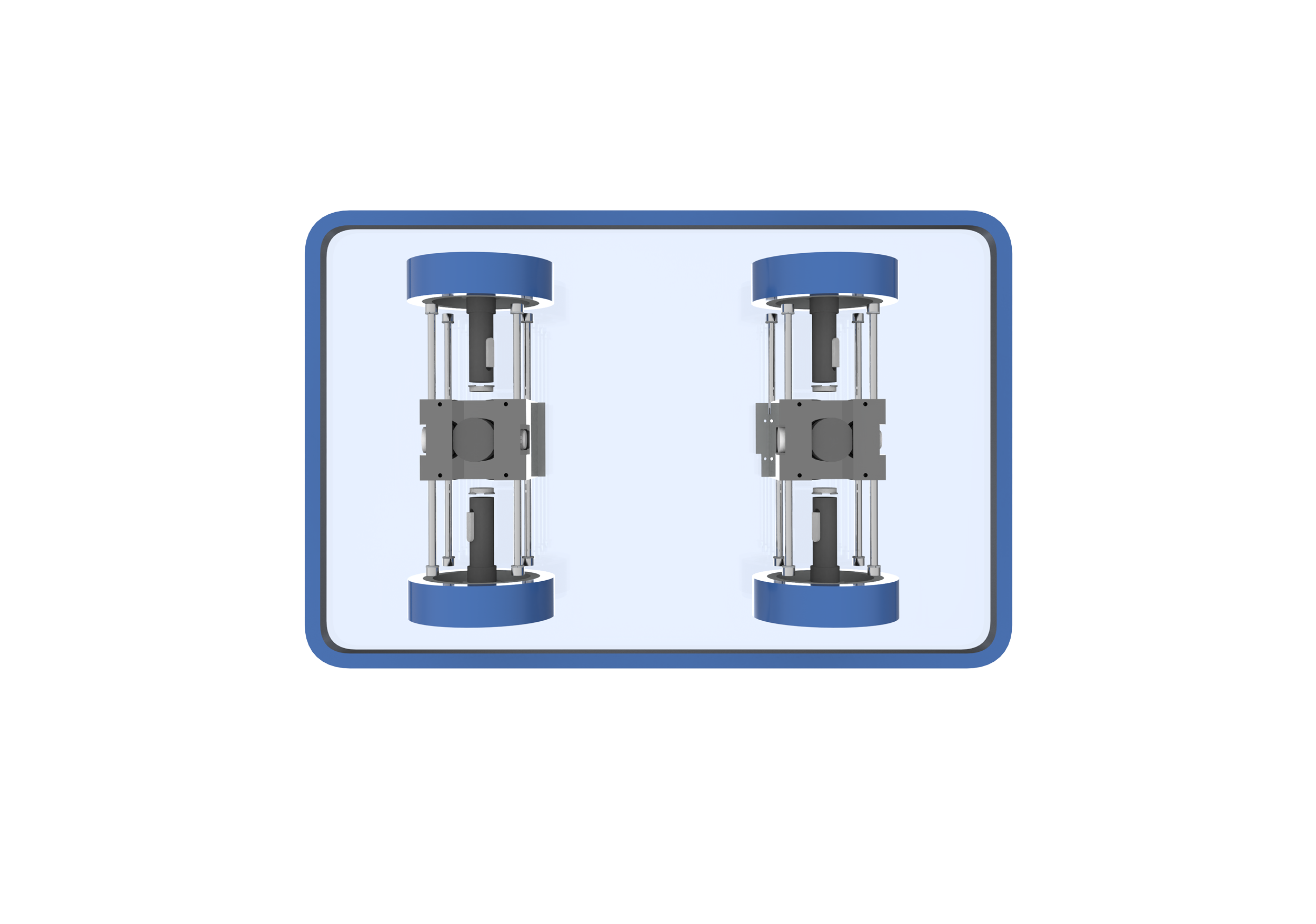
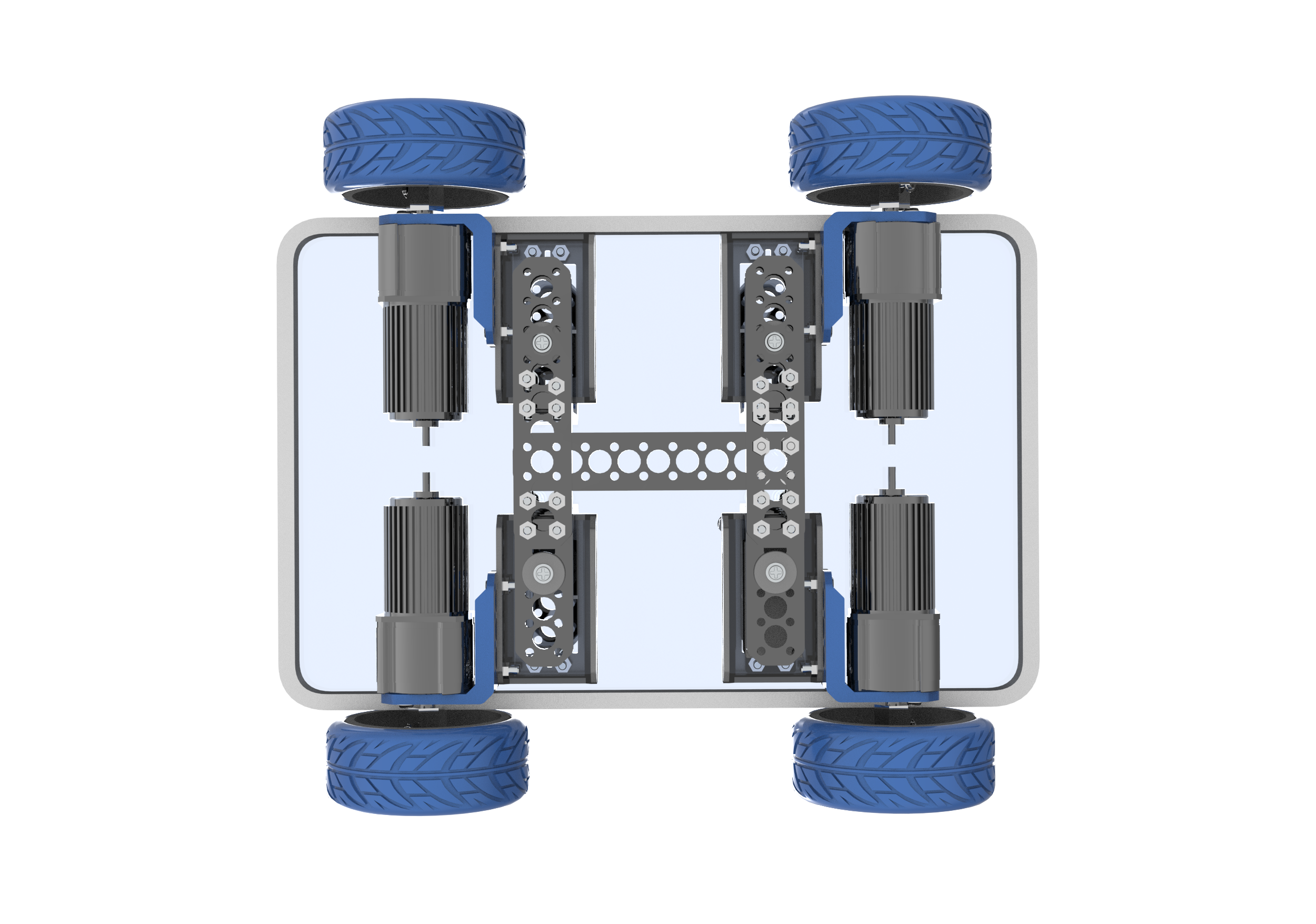
6、四驅差速底盤
四驅差速底盤結構由四個差速輪作為驅動輪組成,驅動每個車輪的力矩分配系統,將動力傳遞到車輛的四個輪子上,可以實現原地轉向運動。小車可以根據路面狀況和車輛動力需求自動調整每個車輪的扭矩分配,以提供最佳的牽引力和操控性能。
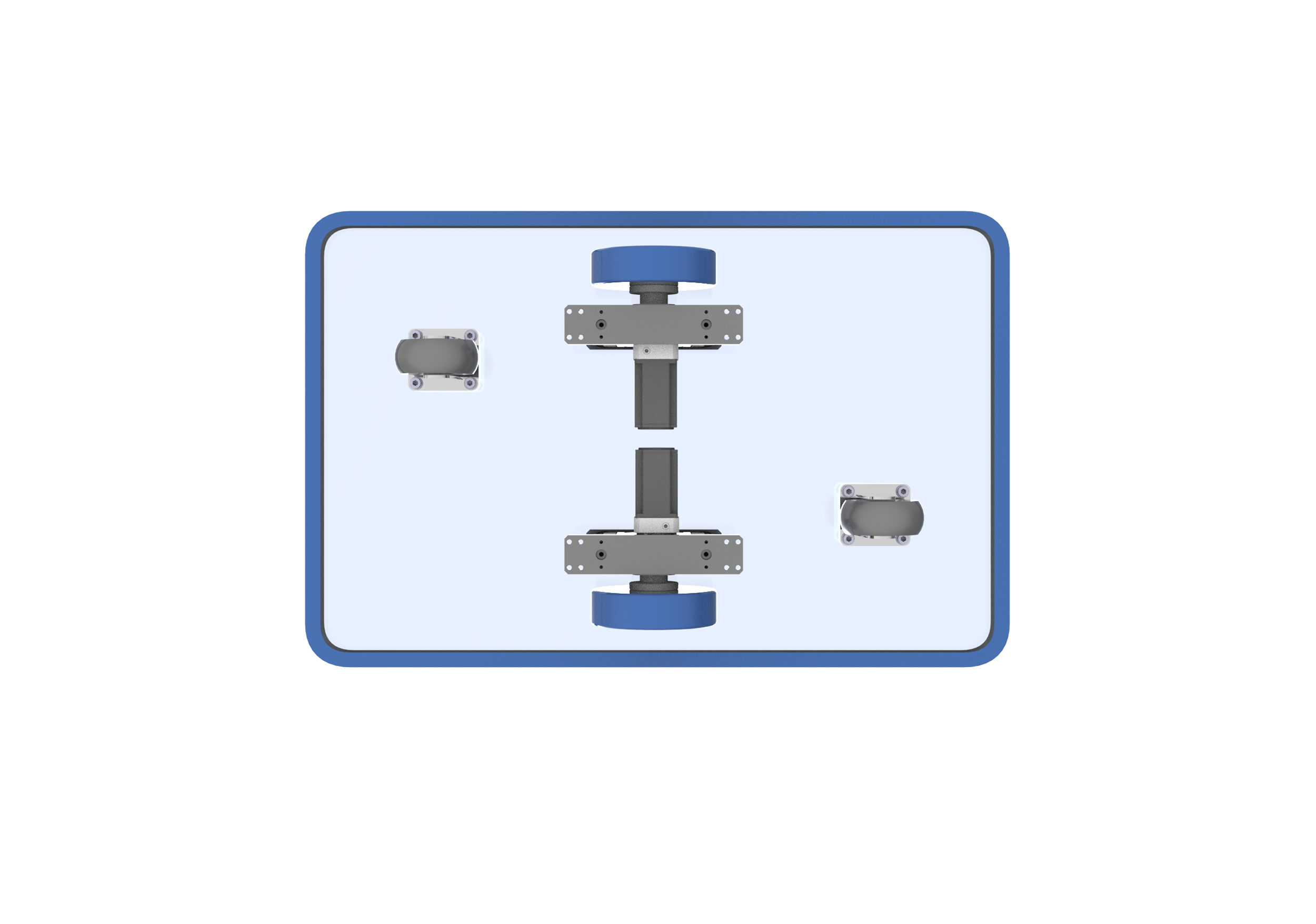
7、單差速總成
單差速總成底盤是由一對可調速的差速驅動輪和一個可活動的連桿轉盤,共同組成的一個差速輪組,通過左右輪的差速進行驅動。依托裝置于中間的可活動的轉盤機構,可以快速的完成一個整體穩住的轉向和角度控制。它能夠提供較好的驅動力和操控性能,適用于多種路況下的駕駛需求。
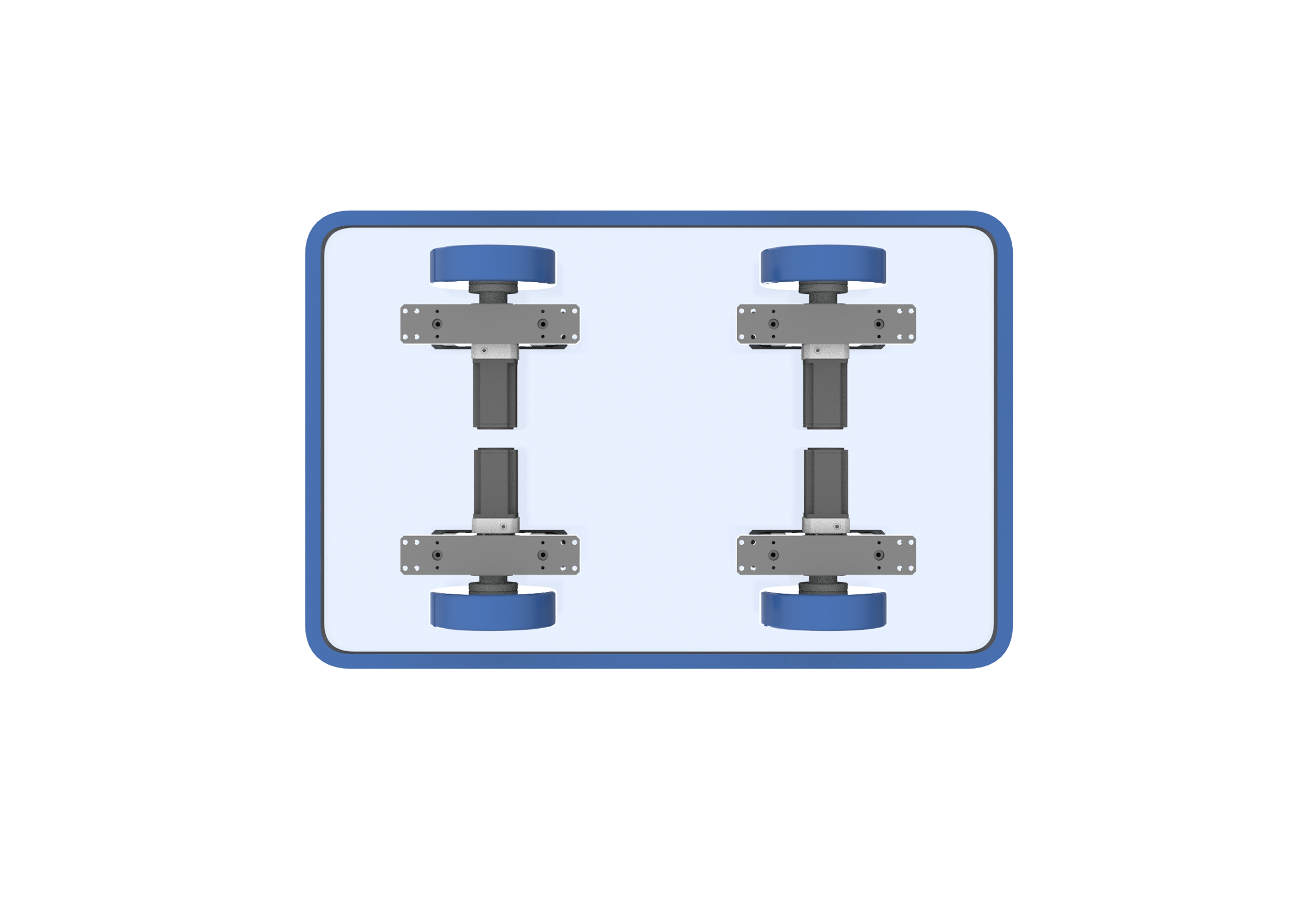
8、雙差速總成底盤
雙差速總成底盤在結構上與單差速總成底盤類似,由兩對差速輪組組成,使得左右兩側的車輪能夠獨立控制。與單差速總成底盤相比,雙差速總成底盤具有更好的操控性能和通過性。
9、四差速總成底盤
四差速總成底盤在雙差速總成底盤的基礎上增加了兩對差速輪組,使得車輛具備更強的通過性和操控性能。四差速總成底盤多適用于重載車輛,因為它的底盤相當于比較靈活,對地面的磨損比較小,且載重能力強。
10、阿克曼底盤
阿克曼底盤是一種常見的乘用車底盤結構,通過不同轉向角度來實現車輛轉彎的原理,實現車輛的轉向和操控。它具有良好的操控性能、穩定性和舒適性。
-
機器人
+關注
關注
211文章
28512瀏覽量
207509 -
移動機器人
+關注
關注
2文章
763瀏覽量
33585 -
底盤
+關注
關注
3文章
247瀏覽量
14697 -
AGV
+關注
關注
27文章
1317瀏覽量
41147
發布評論請先 登錄
相關推薦
Labview My RIO 移動機器人
如何實現移動機器人的設計?
移動機器人底盤主要包含哪些設備
【科普】干貨!帶你從0了解移動機器人(三) ——自主導航系統及上位機軟件設計與實現
【科普】干貨!帶你從0了解移動機器人(四) ——移動機器人導航技術
領銜資訊移動機器人有哪幾種底盤結構?
移動機器人底盤的功能及應用
【科普】干貨!帶你從0了解移動機器人(一)— 什么是移動機器人
【科普】干貨!帶你從0了解移動機器人(二)—— 移動機器人硬件組成

【科普】干貨!帶你從0了解移動機器人(四) ——移動機器人導航技術

【科普】干貨!帶你從0了解移動機器人(一)—— 什么是移動機器人

【科普】干貨!帶你從0了解移動機器人(二)—— 移動機器人硬件組成
【科普】干貨!帶你從0了解移動機器人(四) ——移動機器人導航技術
帶你從0了解移動機器人(五) ( 如何選擇控制器類型)





 工商網監
工商網監
評論